
Fターム[2F065JJ02]の内容
光学的手段による測長装置 (194,290) | 受光部 (23,546) | 線検出 (1,136)
Fターム[2F065JJ02]に分類される特許
61 - 80 / 1,136
ボトル缶のねじ部検査装置
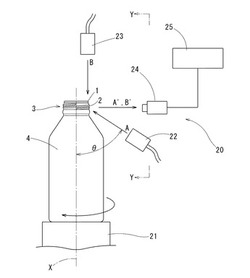
【課題】ボトル缶のねじ部を正確かつ短時間で検査する。
【解決手段】ライナー付キャップを被嵌するために開口端を外方へ向かってカールさせたカール部1とカール部1の下方でキャップをねじ嵌合するねじ部2とからなる口金部3を有するボトル缶4を缶軸Xまわりに回転させながら、口金部3の一部を含むように設定された撮像エリアを撮像して口金部3におけるねじ部2の形状を検査する装置であって、ボトル缶4を保持して缶軸まわりに回転させる回転手段21と、撮像エリア内のボトル缶4のねじ部2に半径方向外方かつ缶軸方向下方から斜め上向きに照明光Aを照射するねじ部照明手段22と、撮像エリアにおける照明光Aの反射光A´を含む検査画像を連続的に取得する撮像手段24と、反射光A´の撮像結果に基づきねじ部2のねじ始まり部を検出し、ねじ始まり部を含むねじ部2の検査を行うねじ部検査手段25とを備える。
(もっと読む)
すき入れ位置検査方法

【課題】 すき入れ及び紙端を鮮明に撮像し、すき入れが施された位置をばらつきが生じることなく高い精度で測定する検査方法を提供する。
【解決手段】
あらかじめ紙端撮像ラインカメラの撮像条件を紙端が鮮明に撮れる撮像条件に設定し、すき入れ撮像ラインカメラの撮像条件をすき入れが鮮明に撮れる撮像条件に設定した後、各ラインカメラにおいて紙端画像とすき入れ画像とをそれぞれ取得し、紙端画像から紙端を示す座標を検出し、すき入れ画像からすき入れを示す座標を検出し、紙端の座標からすき入れの座標までの距離を算出した後、算出した各座標間の距離が許容範囲か否かを判定してすき入れが形成された位置の合否判定を行う。
(もっと読む)
移動環境認識装置及び方法
【課題】高速、且つ高精度に測定対象の形状認識情報を得ることができる移動環境認識装置を提供する。
【解決手段】測定対象7に対して円錐走査を行う円錐走査手段1を備えている。円錐走査手段は、移動環境検出器3と、この移動環境検出器で計測した情報を加工する外界認識装置9を備えている。この外界認識装置は、円錐走査手段の測定データに基づいて前記測定対象の傾斜角、傾斜方向及び測定対象中心までの距離を算出する移動環境検出手段と、この移動環境検出手段が算出した前記測定対象の算出データに基づき、各測定対象の面形状を判断する面形状判断手段と、この面形状判断手段が水平面と判断した所定の測定対象の形状を認識する形状認識手段とを備えている。
(もっと読む)
グリーンシートの膜厚測定装置
【課題】誤差を抑制して測定の精度を向上することができるグリーンシートの膜厚測定装置を提供すること。
【解決手段】膜厚測定装置1は、光源51及び光源51から発せられた光を測定領域Aに向けてライン状に出射する投光ロッド52を有するライン光照明5と、測定領域Aを挟んで投光ロッド52と対向するように配置されたラインカメラ6と、を備えている。投光ロッド52のライン状の光の出射範囲(出射口53)は、投光ロッド52の軸線方向に沿った長さが搬送部3により搬送されるグリーンシートGの軸線方向に沿った長さよりも長い。投光ロッド52と測定領域Aとの間には、投光ロッド52から出射された光のうち、測定領域Aに搬送されたグリーンシートGの軸線方向での端の外側を通って、ラインカメラ6に入射する光を遮光する遮光部材7が設けられている。
(もっと読む)
ラインセンサカメラのキャリブレーション装置およびキャリブレーション方法
【課題】カメラパラメータを用いることなく簡単に高精度の「pixel→高さ」換算式を求めることを可能とする。
【解決手段】長方形状に形成されその表面に白色領域1wと黒色領域1bとを交互に配されてなるキャリブレーション用機材1と、キャリブレーション用機材1の長手方向を撮影するように配設されたラインセンサカメラ2と、ラインセンサカメラ2から出力される画像信号に基づいてラインセンサカメラ2のキャリブレーションを行う処理用コンピュータ3とを備え、白色領域1wと黒色領域1bの幅がそれぞれ同一幅であるとともに白色領域1wと黒色領域1bとの境界線がキャリブレーション用機材1本体の長手方向に対して所定の角度θだけ傾斜するように構成した。
(もっと読む)
計測装置
【課題】被計測面の高さの計測において、計測精度の高精度化と計測範囲の広範囲化との両立に有利な技術を提供する。
【解決手段】参照光と計測光との干渉光強度を検出する複数の領域が2次元状に配列された検出部と、光源からの光を第1と第2の光に分離する第1の光学系と、第1の光が平行光で入射され2次元状の光路長差を有する複数の参照光束を生成する生成部と、生成部で生成された参照光の複数の参照光束のそれぞれが対応する複数の領域に入射するように、検出部に入射させる第2の光学系と、第2の光を被計測面の計測点に集光する第3の光学系と、計測点で反射された第2の光が複数の領域のそれぞれに入射するように、検出部に入射させる第4の光学系と、複数の領域のそれぞれに入射する複数の参照光束が有する光路長と複数の領域との対応関係に基づいて、複数の領域で検出される干渉光の強度から計測点における被計測面の高さを算出する処理部を有する。
(もっと読む)
検査方法および検査装置
【課題】マスクの歪の影響によらずパターンの良否を正確に判定することのできる検査装置および検査方法を提供する。
【解決手段】マスク上の任意の少なくとも4点の座標を測定する(S101)。次いで、これらの少なくとも4点について、それぞれ対応する設計データの各座標との差を求め、最も差の大きい1点を選択する(S102)。次に、選択した1点と設計データの座標との差が予め設定した閾値を超えるか否かを判定する(S103)。閾値以下であれば、少なくとも4点全てを用いて、光学画像と参照画像との位置合わせを行う(S104)。一方、閾値を超える場合には、この点を除外し、残りの少なくとも3点を用いて位置合わせを行う(S105)。
(もっと読む)
基板検査装置、基板検査方法及び該基板検査装置の調整方法
【課題】貼り合わせた2つの基板層のいずれかに検査光の透過しない部分があっても、貼り合わせ界面に発生し得る微小空洞を検査することのできる基板検査装置を提供することである。
【解決手段】基板100の表面に対して斜めに入射するように検査光を帯状に照射する光源ユニット30と、前記検査光により前記基板の表面に形成される帯状照明領域を挟んで光源ユニット30と逆側の所定位置に配置されるラインセンサカメラ20とを有し、照明ユニット30及びラインセンサカメラ20と基板100とが相対移動している際にラインセンサカメラ20から出力される映像信号に基づいて基板画像情報を生成し、基板画像情報に基づいて基板100の第1基板層101と第2基板層102との界面に生じ得る微小空洞についての検査結果情報を生成する構成となる。
(もっと読む)
形状認識方法、形状認識装置及び実装基板生産装置
【課題】物体が高速で移動し、物体の大きさによって必要とされる分解能が異なる場合でも、当該物体の形状認識を精度良く行うことができる形状認識方法を提供する。
【解決手段】物体の形状認識方法であって、基準光を物体上の投影領域に投影する基準光投影ステップ(S102)と、基準光が投影された投影領域のうちライン状の領域を撮像する基準光撮像ステップ(S104)と、輝度の傾斜方向に輝度が異なる輝度傾斜量を有する光である輝度傾斜光を投影領域に投影する傾斜光投影ステップ(S106)と、輝度傾斜光の投影方向と異なる撮像方向で、輝度傾斜光が投影された投影領域のうち、輝度傾斜光の輝度の傾斜方向と異なる方向に延びて配置されるライン状の領域を撮像する傾斜光撮像ステップ(S108)と、基準光撮像ステップ(S104)と傾斜光撮像ステップ(S108)での撮像結果を用いて物体の形状を認識する形状認識ステップ(S110)とを含む。
(もっと読む)
3次元計測装置
【課題】反射率の低い被計測物であっても輪郭を正確に計測することができる3次元計測装置を提供する。
【解決手段】
所定の波長領域を有する光を照射し被測定物で反射した反射光と基準反射光との干渉光の各波長の光強度を検出して分光干渉波形を求め、分光干渉波形と理論上の波形関数に基づいて波形解析を実行する制御手段を具備する3次元計測装置であって、被計測面が対物レンズの集光点位置と一致するように予め波形解析後の光強度のピーク位置と共焦点位置の対応をとっておき、制御手段はイメージセンサーからの検出信号に基づいて分光干渉波形を求め、分光干渉波形と理論上の波形関数に基づいて波形解析を実行し、対物レンズの集光点位置に対応する光強度を位置付け手段によって特定されたX、Y座標におけるZ座標の光強度としてメモリに保存し、該メモリに保存されたX、Y、Z座標に基づいて3次元画像を形成する。
(もっと読む)
液晶アレイ検査装置およびライン座標位置算出方法
【課題】表示パターンのフレームサンプリングから得られた撮像画像(シグナルイメージ)の収縮、膨張等のフレーム間の幅に不均等な部分が生じた場合であっても、各ラインの座標位置を正確に算出し、液晶パネルのピクセル位置を正確に算出する。
【解決手段】表示パターンを撮像して得られる撮像画像(シグナルイメージ)において、実検出ラインの座標位置を検出した後、次に座標位置を検出する実検出ラインを求める際に、前の実検出ラインの信号強度パターンと比較することによってラインの良・不良の検出、および、不良ラインの収縮又は膨張の判定を行い、次の実検出ラインを求める。ラインの良・不良を検出し、不良ラインの収縮・膨張の判定することによって、ライン幅にばらつきが生じた場合であっても、各ラインの座標位置を正確に算出する。
(もっと読む)
マーク検出方法及び装置、位置制御方法及び装置、露光方法及び装置、並びにデバイス製造方法
【課題】物体上の複数のマークを効率的に、かつ高精度に検出する。
【解決手段】少なくとも1軸方向に関する検出領域が互いに異なる複数のアライメント系で、少なくともその1軸方向に関して互いに異なる位置に配置されたウエハ上のマークを検出するマーク検出方法であって、複数のアライメント系の検出領域にそれぞれウエハ上のマークを移動するステップ315と、ウエハをZ方向にスキャンして複数のアライメント系の検出信号及びデフォーカス量に対応するフォーカス信号を取り込むステップ316と、複数のアライメント系の検出信号とフォーカス信号とからフォーカス信号のオフセットを求めるステップ317とを有する。
(もっと読む)
光学式曲がり測定装置
【課題】複数本の光ファイバーを設置し難い測定対象に対しても適用でき、測定対象の複数個所の特定方向の曲がり量を独立に測定し得る光学式曲がり測定装置を提供する。
【解決手段】光学式曲がり測定装置は、測定光を供給する光源ユニット110と、測定光を伝達する光ファイバー120と、光ファイバー120の異なる複数の部分に設けられた複数の光学特性変化部材150A,150B,150Cと、光ファイバー120から出力される光を検出する光検出ユニット140を備えている。各光学特性変化部材150A,150B,150Cは、これが設けられた光ファイバー120の部分の特定方向の曲がり量に応じてこれに入射した光に光学特性の変化を与える。光検出ユニット140は、光学特性の変化を受けた光を分離して検出し、その検出光強度に基づいて光ファイバー120の複数の部分の特定方向の曲がり量を独立に測定する。
(もっと読む)
CCDカメラを使用した測定装置、及びその応答時間の短縮方法
【課題】CCDカメラの飽和露光量を超える過大な入力光量に対して、最短時間で測定可能なCCDカメラ信号を得ることが可能な測定装置、及びその応答時間の短縮方法を提供することを目的とする。
【解決手段】CCDカメラ1aの露光時間を制御する測定装置100の応答時間の短縮方法であって、CCDカメラは、異なる透過率の2つ以上のフィルタ出力を同時に使用し、入力光量の最小値を検出する第1の透過率の大きいフィルタ出力の測定範囲の最大値(飽和値)と、第2の透過率の低い第2のフィルタ出力の測定範囲の(最小値)とがラップするような透過率とし、第1のフィルタ出力が飽和している場合には、前記第2のフィルタ出力から、前記第1の透過率と前記第2の透過率との比率から、前記第1のフィルタ出力に換算した露光時間の補正ゲインを求め、一回の制御周期(測定周期)で入力光量を検知し、次の制御周期で第1のフィルタの露光時間を更新する。
(もっと読む)
トロリ線測定方法及び装置
【課題】トロリ線以外の構造物の影響を無くしトロリ線の摩耗量や偏位量を正確に測定する。
【解決手段】架線検測車屋根上にトロリ線へ投光する光を照射する投光ユニットを設け、トロリ線より反射した光を受光する受光ユニットを設ける。受光ユニットより受光した信号を二値化回路によってある閾値で二値化し、エッジ検出回路でパルス波形の立ち下がりから次の立ち上がりまでの距離に基づいて、剛体やイヤーなどのノイズ信号とトロリ線の信号を判別し、トロリ線摺面の検出信号を得る。エッジ検出回路から得られた検出信号は、演算装置によって前回の偏位データと今回の偏位データが比較され、前回のものと最も近い信号をトロリ線データとして検出し、トロリ線摩耗量(残存直径)に変換される。これによって、ノイズによる誤検出を低減させ、トロリ線の外形を正確に求める。
(もっと読む)
三次元形状計測装置、プログラム、コンピュータ読み取り可能な記録媒体、及び三次元形状計測方法
【課題】広い視野に渡る計測対象の三次元形状情報を迅速かつ容易に計測する。
【解決手段】三次元形状測定装置10は、計測対象に投影された光パタンを解析することによって、計測対象の三次元形状を計測する装置である。ここで、三次元形状測定装置10は、光パタンが投影された計測対象を画像として読み取るためのラインセンサ16と、ラインセンサ16により読み取られた画像における光パタンを空間縞解析法に基づいて解析して、計測対象の三次元形状の情報を算出する画像解析部とを備えている。
(もっと読む)
トロリ線測定方法及び装置
【課題】トロリ線以外の構造物の影響を無くしトロリ線の偏位量を正確に測定する。
【解決手段】トロリ線測定装置は、トロリ線に向けて光を投光し、その反射光を受光することによってトロリ線の外形を測定する。このトロリ線の外形を測定する際に、剛体電車線区間では剛体部やイヤー部からのノイズが多く正確に測定することが困難である。そこで、このトロリ線測定装置は、剛体電車線区間でトロリ線及びその近傍の電車線設備(剛体部及びイヤー部)の画像を撮影し、撮影された画像に基づいて電車線設備の偏位を測定し、その測定結果をトロリ線の外形の測定に反映させるようにした。
(もっと読む)
共焦点計測装置
【課題】本発明は、共焦点光学系を利用して計測対象物の変位を計測する共焦点計測装置であって、光の波長による、計測対象物の変位を計測する精度の変動を抑えた共焦点計測装置を提供する。
【解決手段】本発明は、共焦点光学系を利用して計測対象物の変位を計測する共焦点計測装置である。共焦点計測装置100は、白色LED21と、白色LED21から出射する光に、光軸方向に沿って色収差を生じさせる回折レンズ1と、回折レンズ1より計測対象物200側に配置され、回折レンズ1で色収差を生じさせた光を計測対象物200に集光する対物レンズ2と、対物レンズ2で集光した光のうち、計測対象物200において合焦する光を通過させるピンホールと、ピンホールを通過した光の波長を測定する波長測定部とを備えている。回折レンズ1の焦点距離は、回折レンズ1から対物レンズ2までの距離と、対物レンズ2の焦点距離との差より大きい。
(もっと読む)
ムラ検査用画像取得装置およびムラ検査装置並びに照射部の位置決定方法
【課題】照射部の発光ムラがムラ検査用画像に与える影響を抑制する。
【解決手段】ムラ検査用画像取得装置11は、基板9が載置されるステージ2、基板9の検査表面91に向けて照明光を照射する照射部3、検査表面91にて反射した照明光を受光する撮像部41を備える。撮像部41は、ラインセンサ411および撮像光学系412を備える。ラインセンサ411の各受光素子には、ムラ検査に必要な強度の光が入射する。撮像光学系412は、物体側において非テレセントリックであり、ラインセンサ411の位置と光学的に共役な合焦位置は、検査表面91から撮像部41側にずれて位置する。ムラ検査用画像取得装置11では、照射部3と検査表面91との間の光軸J1に沿う方向における距離が100mm以上である。これにより、照射部3の発光ムラがムラ検査用画像に与える影響を抑制することができる。
(もっと読む)
線幅測定装置、画像処理装置、画像処理システム及びプログラム
【課題】線幅見本を画像読取部で読み取ることによる線幅測定の結果の安定性を向上する。
【解決手段】画像読取部での読取画像を受け付ける読取画像受付部25において、白黒2値画像取得部81が、線幅測定用チャートの読取画像である白黒2値画像を取得し、領域決定部82が、白黒2値画像上で線幅測定に用いる線幅測定領域を決定し、角度検出部83が、線の読取角度を検出し、角度比較部85が、この読取角度と線を読み込む角度として指定された指定角度との差分が閾値以下かどうか判定し、閾値以下でなければ、警告出力部86が、線幅測定用チャートの再読み込みを画像読取部に指示し、閾値以下であれば、画素カウント部87が、線を構成する画素のうち線幅測定領域内の画素数をカウントし、線幅決定部88が、カウントされた画素数、線幅測定領域の線描画方向の長さに相当する画素数等に基づいて、線幅を決定する。
(もっと読む)
61 - 80 / 1,136
[ Back to top ]