
Fターム[2F065JJ02]の内容
光学的手段による測長装置 (194,290) | 受光部 (23,546) | 線検出 (1,136)
Fターム[2F065JJ02]に分類される特許
81 - 100 / 1,136
ムラ検査用画像取得装置およびムラ検査装置並びに照射部の位置決定方法
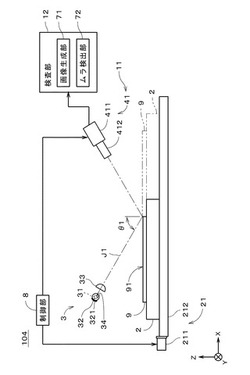
【課題】照射部の発光ムラがムラ検査用画像に与える影響を抑制する。
【解決手段】ムラ検査用画像取得装置11は、基板9が載置されるステージ2、基板9の検査表面91に向けて照明光を照射する照射部3、検査表面91にて反射した照明光を受光する撮像部41を備える。撮像部41は、ラインセンサ411および撮像光学系412を備える。ラインセンサ411の各受光素子には、ムラ検査に必要な強度の光が入射する。撮像光学系412は、物体側において非テレセントリックであり、ラインセンサ411の位置と光学的に共役な合焦位置は、検査表面91から撮像部41側にずれて位置する。ムラ検査用画像取得装置11では、照射部3と検査表面91との間の光軸J1に沿う方向における距離が100mm以上である。これにより、照射部3の発光ムラがムラ検査用画像に与える影響を抑制することができる。
(もっと読む)
マーク検出方法及び装置、並びに露光方法及び装置

【課題】物体に設けられた複数のマークをより短時間に高精度に検出する。
【解決手段】ウエハマークの位置を検出するマーク検出方法であって、複数のアライメント系AL1,AL21〜AL24の検出領域に対してウエハWを移動中に、アライメント系AL1,AL21〜AL24とウエハWの表面とのデフォーカス量を計測し、この計測結果に基づいてウエハWの面位置及び傾斜角の少なくとも一方を制御し、ウエハマークWMC1,WMA1,WMD1がアライメント系AL22,AL1,AL23の検出領域内に達したときに、ウエハWを静止させて、アライメント系AL22,AL23で対応するウエハマークWMC1,WMD1の位置を検出する。
(もっと読む)
被計測体の表面異常識別装置
【課題】高温の被計測体に発生する酸化スケール等の表面異常を精度良く識別することができる被計測体の表面異常識別装置を提供する。
【解決手段】高温の被計測体5から得られる輻射光を輻射光撮像部18により、被計測体5が一定角度回転される毎に撮像して得た複数の輻射光画像を合成して、合成輻射光画像を作成する画像合成部10と、前記合成輻射光画像から所定領域を抽出して、撮像中の被計測体5の温度低下に基づく前記所定領域の画像の輝度変化を補正する第1輝度補正部12と、前記補正した所定領域の画像から所定暗部を検出し、該所定領域の画像の暗部を前記被計測体の表面異常と判定する異常判定部14と、を備える被計測体の表面異常識別装置1を用いる。
(もっと読む)
光学的記録媒体、該光学的記録媒体の光学的測定方法及び光学的測定装置
【課題】2つの屈折率分布間の距離を、精度よく、非破壊で、高速に測定可能な光学的記録媒体、該光学的記録媒体の光学的測定方法及び光学的測定装置を実現する。
【解決手段】光を散乱させて測定・解析するための入射光波長の最小値をλとするとき、周囲と屈折率の異なる2つの光散乱体60の距離が0.7λ以上15λ以下であり、2つの光散乱体の全光線透過率または全光線反射率が50%以上であり、散乱光強度の角度分布またはある角度での散乱光強度の波長分布を角度の正弦または1/波長を横軸としてフーリエ変換し、フーリエ変換後のピークの横軸を読み取ることで、2つの領域の距離を求める。
(もっと読む)
3次元計測方法
【課題】平面精度が低い基板上に生成された、直径数十ミクロン程度のサイズのバンプの3次元計測を可能とする。
【解決手段】測定対象に固有の傾斜角で固有の色相光を投光し、固有の傾斜角で傾斜した視軸のカラーラインセンサカメラで撮像し、得られた画像画素の色相光反射強度基準化比率から、測定対象の表面パッチ傾斜角を算出し、表面パッチ傾斜角から表面パッチの高さを算出する3次元計測法において、まず光拡散表面を有する球状モデルを対象として、色相光反射強度基準化比率と表面傾斜角の対応表を作成し、未知の測定対象を撮像した画像画素の色相光反射強度基準化比率から表面パッチの傾斜角を算出し、傾斜角から表面パッチの高さを算出し、これをスキャン方向に沿って加算して縦断面高さデータを算出し、縦断面高さデータを対象横幅に亘って集積して、未知の測定対象の3次元計測を行う。
(もっと読む)
計測装置
【課題】被加工物の研削時におけるノイズ信号による誤判定を防止し、被加工物の厚みまたは上面高さ位置を正確に計測することができる計測装置を提供する。
【解決手段】被加工物保持手段に保持された被加工物の上面で反射した反射光と光路長が一定の基準反射光に基づいて被加工物の厚み方向における上面までの2点間の距離を計測する計測装置であって、被加工物の上面で反射した反射光と光路長が一定の基準反射光を受光したイメージセンサーからの検出信号に基づいて分光干渉波形を求め、この分光干渉波形と理論上の波形関数に基づいて波形解析を実行し、被加工物の上面で反射した反射光の光路長と基準反射光の光路長との光路長差に対応して出力される信号強度における現在出力された値と前に出力された値との絶対値の差を求め、この絶対値の差を各光路長差毎の信号強度における現在出力された値に加算し、加算された値が最も高い光路長差を被加工物の厚み方向における上面までの2点間の距離として決定する。
(もっと読む)
分光特性測定装置、その制御方法、及び分光特性測定方法、並びに分光特性測定装置の光路長差伸縮機構
【課題】外乱による信頼性の低下を抑えた分光特性測定装置とその制御方法、分光特性測定方法、及び光路長差伸縮機構を提供する。
【解決手段】本発明は、被測定物の測定点から多様な方向に向かって発せられた光を一つにまとめた後、分割光学系によって第1反射部と第2反射部に導き、前記第1反射部と前記第2反射部の相対位置に影響を及ぼす外乱を推定し、該外乱を解消するように前記第1反射部と前記第2反射部の少なくとも一方を移動させることにより前記第1反射部によって反射された第1反射光と前記第2反射部によって反射された第2反射光の光路長差を伸縮させつつ、前記第1反射光と前記第2反射光を結像光学系によって同一点に導き、その点の干渉光強度変化に基づき前記被測定物の測定点のインターフェログラムを求め、このインターフェログラムをフーリエ変換することによりスペクトルを取得する。
(もっと読む)
トロリ線の摩耗状態監視装置
【課題】トロリ線とパンタグラフが離れたときに発生するアークを検知し、このときのトロリ線の下面、すなわち摩耗面を閲覧することができるトロリ線の摩耗状態監視装置を提供する。
【解決手段】トロリ線の摩耗状態監視装置において、車両10の屋根10a上にパンタグラフ11に向けて設置されパンタグラフ11を監視するエリアカメラ1と、前記車両10の屋根10a上に鉛直上向きに設置されトロリ線13の下面を撮影するラインセンサカメラ2と、前記エリアカメラ1及び前記ラインセンサカメラ2により撮影した画像を入力及び録画し、前記パンタグラフ11からアークが発生したときの前記ラインセンサカメラ2により撮影した画像を閲覧することができる画像処理装置3とを備えることとした。
(もっと読む)
透光性板状物体の厚さ測定装置
【課題】 透光性板状物体の厚さを全域にわたって短時間で精度よく測定する。
【解決手段】 測定用レーザ光をガラス板Gの表面及び裏面で反射させて、反射光をラインセンサ55に導いてガラス板Gの厚さを測定する。測定用レーザ光は、Y軸線回りに回転可能なガルバノミラー45及びX軸線周りに回転可能なガルバノミラー51を介してガラス板Gに照射される。サーボ用レーザ光も、ガルバノミラー45,51を介してガラス板Gに照射され、反射光はガルバノミラー45,51を介して4分割フォトディテクタ66に導かれる。4分割フォトディテクタ66により、ガラス板Gの表面のX軸及びY軸線回りの傾きが検出され、この傾きに応じてガルバノミラー45,51を駆動するサーボ制御により、測定用レーザ光をガラス板Gに対して常に一定方向から入射させる。
(もっと読む)
サンプル媒体上のレチクルマークを用いて、希少細胞のスキャナ画像座標を顕微鏡座標に変換する方法
【課題】物体の位置を取得する方法を提供する。
【解決手段】画像形成システムの第1座標空間が定められ、該第1座標空間における座標が指定される。第2の画像形成システムの第2座標空間が定められ、該第2座標空間における座標が指定される。第1座標空間の指定された座標を用いることにより、座標変換パラメータが計算される。その後、第1座標空間において少なくとも1つの物体の座標が指定され、該物体の第1座標空間座標が第2座標空間における独自の座標に変換される。
(もっと読む)
検査装置及び欠陥検査方法
【課題】炭化珪素基板又は炭化珪素基板に形成されたエピタキシャル層に存在する欠陥を検出し、検出された欠陥を分類する検査装置を実現する。
【解決手段】本発明では、微分干渉光学系を含む走査装置を用いて、炭化珪素基板の表面又はエピタキシャル層の表面を走査する。炭化珪素基板からの反射光はリニアイメージセンサ(23)により受光され、その出力信号は信号処理装置(11)に供給する。信号処理装置は、炭化珪素基板表面の微分干渉画像を形成する2次元画像生成手段(32)を有する。基板表面の微分干渉画像は欠陥検出手段(34)に供給されて欠陥が検出される。検出された欠陥の画像は、欠陥分類手段(36)に供給され、欠陥画像の形状及び輝度分布に基づいて欠陥が分類される。欠陥分類手段は、特有の形状を有する欠陥像を識別する第1の分類手段(50)と、点状の低輝度欠陥像や明暗輝度の欠陥像を識別する第2の分類手段(51)とを有する。
(もっと読む)
パターン形状検査方法及びその装置
【課題】パターンの形状測定において、対象構造が計測可能か、又はどの程度の誤差が生じるかを分光反射率測定により事前に知る。
【解決手段】繰り返しパターンを分光検出して分光反射率を求めるとともに検出時に生じる検出波長ごとのノイズの量を求め、分光反射率の情報及び検出時に生じる検出波長ごとのノイズの量の情報と、繰り返しパターンの屈折率と消衰係数とを含む光学的材質の情報及び繰り返しパターンの形状の情報とを用いて繰り返しパターンの形状を算出して所定の精度で繰り返しパターンを計測することが可能かを評価し、評価した結果所定の精度で計測可能と判定した場合に繰り返しパターンと同一のパターンが形成された基板を順次分光検出してパターンの形状を検査するようにした。
(もっと読む)
画像形成装置および画像形成方法ならびに部品実装装置
【課題】安定した3次元認識画像を形成して正しい部品認識結果を得ることができる画像形成装置および画像形成方法ならびに部品実装装置を提供する。
【解決手段】3次元部品7を対象とする3次元画像形成において、走査光の計測対象面からの反射光の受光位置を検出する位置検出部を、受光面の計測対象面に対する傾斜角度が相異なる第1PSD25A、第2PSD25Bを有する構成とし、第1PSD25A、第2PSD25Bがそれぞれ受光した光量のうち大きい方の光量が所定の範囲を超えたとデータ処理部15aの受光量判定部によって判定されたならば、当該走査部位についての受光位置検出結果として小さい方の光量に基づく受光位置検出結果を採用して3次元認識画像を形成する。これにより、受光した光量が過大である場合に生じるノイズを排除することができ、安定した3次元認識画像を形成して正しい部品認識結果を得ることができる。
(もっと読む)
座標入力装置
【課題】複数の要素によって構成される座標入力装置において、各要素をより正確な位置関係で配置することを容易とする。
【解決手段】入射光を、入射光の入射方向へと反射する再帰反射部材が配置されたフレームと、再帰反射部材へと光を投光する投光手段、及び投光手段によって投光され再帰反射部材によって反射された光を受光する受光手段を備えるセンサユニットと、を備え、フレームとセンサユニットとが座標入力領域の周囲に所定の位置関係となるように配置された際に、座標入力領域に対する入力位置を検出する座標入力装置。フレームは、フレームとセンサユニットとが所定の位置関係となるように配置された際に、センサユニットの投光手段から投光された光を、センサユニットの受光手段へと反射するように配置された鏡面部材を備える。
(もっと読む)
検査装置および方法、リソグラフィ装置、リソグラフィ処理セル、およびデバイス製造方法
【課題】オーバーレイ測定、非対称性測定、およびインダイオーバーレイターゲットの再構築を可能にする。
【解決手段】四分くさび光デバイス(QW)は、基板から散乱した放射の回折次数を別々に再誘導し、第1方向および第2方向の各々に沿って照明から回折次数を分離する。例えば、0次(0、0’)および1次(−1、+1’)を、各入射方向について分離する。マルチモードファイバ(MF)での捕捉の後、スペクトロメータ(S1−S4)を使用して波長(I0’(λ)、I0(λ)、I+1’(λ)、およびI−1(λ))の関数としての空間的に再誘導された回折次数の強度を測定する。そして、これをオーバーレイエラーの計算、または単一格子の非対称パラメータの再構築に用いる。
(もっと読む)
検査装置及び検査方法
【課題】デバイスが形成されている半導体基板の全面について厚さムラを短時間で検査することができる検査装置を実現する。
【解決手段】本発明による検査装置は、半導体基板(7)のデバイス形成面とは反対側の裏面(7a)に向けて、前記半導体基板に対して半透明な照明光を照射する照明手段(1,2,3)と、半導体基板の裏面に入射し、デバイス構造面(7b)で反射し、前記裏面側から出射した照明光を受光する撮像手段(15)と、 撮像手段からの出力信号を用いて厚さムラを検出する信号処理装置(20)とを具える。信号処理装置は、前記撮像手段からの出力信号を用いて、半導体基板に形成されているデバイスの半導体基板の裏面側から撮像した2次元画像を形成する手段(21)と、撮像されたデバイスの2次元画像と基準画像とを比較し、画像比較の結果に基づいて前記半導体基板の厚さムラを検出する厚さムラ検出手段(22,23,24)とを有する。
(もっと読む)
シャフトの変形を測定するための装置及び方法
【課題】 シャフトの変形を測定するための装置及び方法を提供する。
【解決手段】 デバイスによってシャフト2の変形を測定するための方法が、変形が加えられる前に、シャフト2に付加されたパターン3を照明するステップと、パターン3によって反射された放射線を検出することによって第1基準位置を検出するステップとから成り、変形が加えられた後に、パターン3を照明するステップと、パターン3によって反射された放射線を検出することによって第2基準位置を検出するステップとから成る。これにより、第1基準位置と第2基準位置との間の距離に基づいて、シャフトの円周方向の変形及び/又はトルクが求められる。
(もっと読む)
照明装置、パターン検査装置及び照明光の形成方法
【目的】コヒーレント光の干渉性をより排除することが可能な照明装置を提供する。
【構成】照明装置300は、コヒーレント光を発生する光源103と、ランダムに配置された、波長以下の高さの複数の段差領域が形成され、光源からの光線を通過させて位相を変化させる回転位相板14と、複数のレンズがアレイ状に配列され、回転位相板を通過した光線を通過させるインテグレータ20と、を備え、複数の段差領域の最大サイズと回転位相板から蝿の目レンズの入射面までの光学倍率の積が、複数のレンズの配列ピッチ以下となる箇所と、複数のレンズの配列ピッチより大きくなる箇所とが混在するように構成されたことを特徴とする。
(もっと読む)
検出装置
【課題】確実に、かつ、高速に、合焦位置の検出を行う。
【解決手段】ラインセンサ25を構成するラインピクセル上の合焦時の光点像(レーザスポットS1)では、レーザ光の光量が絞られる調整制御が行われ、合焦ピクセルから離れた位置となる非合焦時の光点像(レーザスポットS2)では、レーザ光の光量が増加される調整制御が行われるように、あらかじめ定められたテーブルデータに従ったフィードフォワード制御が行われることで、確実に、かつ、高速に、合焦位置の検出を行うことができる。本発明は、例えば、対象物の断面形状を測定する測定装置に用いられる位置検出装置に適用することができる。
(もっと読む)
3次元形状測定装置
【課題】受光センサにて受光した反射光のスポットが欠けた場合であっても、精度良く測定対象物の3次元形状を測定できる3次元形状測定装置及び3次元形状測定方法を提供する。
【解決手段】受光信号の強度の閾値としてレベルL1を設ける。受光信号の強度が最も大きい受光素子の位置を基準位置P1(n)とする。基準位置P1(n)の両側から、受光信号の強度がレベルL1である受光素子又はレベルL1に最も近い受光素子の位置を1つずつ取得する。前記取得した2つの受光位置の中点と基準位置P1(n)とのずれ量D1が許容値以下であれば、基準位置P1(n)を反射光の結像位置P(n)と決定し、結像位置P(n)を用いて、その測定ポイントの3次元座標を算出する。ずれ量D1が許容値より大きければ、その測定ポイントの3次元座標を算出しない。
(もっと読む)
81 - 100 / 1,136
[ Back to top ]