
Fターム[2F065PP01]の内容
光学的手段による測長装置 (194,290) | 装置全体の構造 (6,881) | 検出器の支持、保持関連 (1,622)
Fターム[2F065PP01]の下位に属するFターム
Fターム[2F065PP01]に分類される特許
61 - 80 / 320
TCPハンドリング装置
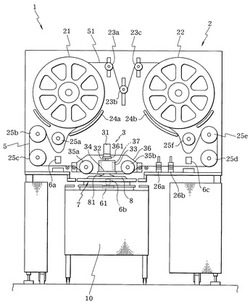
【課題】インデックスタイムを効果的に短縮することのできるTCPハンドリング装置を提供する。
【解決手段】TCPハンドリング装置1において、キャリアテープにおける露光単位マーク54を取得する第2カメラ6bと、TCPの外部端子およびコンタクト部の接続端子が正しく接続するように、位置ずれ補正を行うプッシャステージ4とを設ける。取得した露光単位マーク54の画像情報に基づいて、試験部に新たな露光単位が位置したと判断したときに、プッシャステージ4は位置ずれ補正を行い、位置ずれ補正を行った後、次の露光単位が試験部に位置すると判断するまでは、コンタクト不良となる以外、プッシャステージ4は位置ずれ補正を行わない。
(もっと読む)
電気鉄道保守用車両位置測定装置

【課題】車両の走行位置と通過時刻との関係を高精度に特定することを可能とした電気鉄道保守用車両位置測定装置を提供する。
【解決手段】電気鉄道保守用車両位置測定装置において、ラインセンサ1と、ラインセンサ1で撮影した画像をテンプレート画像と入力画像として作成する画像作成部10と、画像作成部10において作成したテンプレート画像と入力画像を保存するメモリ11と、保存したテンプレート画像からSIFT特徴量を抽出してテンプレートデータを作成しメモリ12に保存するテンプレート作成処理部13と、入力画像からSIFT特徴量を抽出しメモリ12に保存するSIFT特徴量抽出処理部14と、保存したテンプレートデータのSIFT特徴量と入力画像のSIFT特徴量との対応点を探索し入力画像中のハンガ位置を検出してメモリ12に保存するハンガ位置検出処理部15とを備えた。
(もっと読む)
ひび割れ検知センサ
【課題】構造物にひび割れが発生した場合に、そのひび割れの発生を、光ファイバを使用した簡易な構成でより確実に確認することができるひび割れ検知センサを提供する。
【解決手段】可視光が導入される光ファイバ2であり、その全長内の一部の区間部分2axが、検知対象部Wに発生するひび割れに応じて破断するように検知対象部Wに固定される光ファイバ2と、区間部分2axを被覆するように光ファイバ2に装着されており、区間部分2axが破断した状態で光ファイバ2に可視光を導入した時に区間部分2axの破断箇所から漏出する可視光を透過させつつ散乱させる可視光散乱機能と区間部分2axの防水を司る防水機能とを有する被覆部材3とを備える。
(もっと読む)
ケーブル弛度観測システム
【課題】 ケーブルの弛度観測を容易かつ適正に行えるようにする。
【解決手段】 弛度測定装置10に、送電線Eの弛み部を撮影する主カメラ20と、主カメラ20を載置し主カメラ20による撮影方向を調節自在な雲台20と、を備え、地上側装置として、弛度測定装置10に制御指令を送信するリモコン50と、主カメラ20による撮影画像を表示するモニタ60と、を備え、リモコン50からの制御指令により、主カメラ20と雲台20とが制御可能となっている。
(もっと読む)
移動体とその旋回半径算出方法
【課題】取付けられる搬送台車によって旋回半径が異なっても、目標地点に到達可能な移動体と搬送台車が取付けられた状態の移動体の旋回半径算出方法を提供する。
【解決手段】搬送台車19が固定される台車取付部20及び駆動車輪12を備え、その場旋回が可能な車両本体11と、車両本体11に装着され、車両本体11から視認できる外環境を撮像するカメラ22と、カメラ22を介して得られる画像中での、車両本体11の旋回前後の特定の被写体の位置から車両本体11の旋回角度θを検知する旋回角度検出手段35と、搬送台車19を固定した車両本体11が旋回角度θ旋回した際のカメラ22の移動距離Dを旋回角度θで除算して、搬送台車19を固定した車両本体11の旋回半径Rを算出する旋回半径算出手段33とを有する。
(もっと読む)
車輪挙動計測装置
【課題】走行状態の車両における路面に対する車輪の姿勢や、車体に対する車輪の姿勢及び車輪のタイヤ形状を定量的に計測する挙動計測装置を提供する。
【解決手段】車両走行時の車輪の挙動を計測する車輪挙動計測装置であって、車両に設けられ、車輪を撮像する複数の車輪カメラ及び路面を撮像する複数の路面カメラと、車輪のホイールに設けられ、当該車輪のホイールの外側面と平行に取り付けられる不動板と、不動板における車輪カメラの視野内に、少なくとも3箇所配設される第1被測定体と、ホイールの外側面における車輪カメラの視野内に、複数配設される第2被測定体と、車輪カメラと路面カメラとが撮像した画像を記憶する記憶手段と、記憶手段が記憶した画像を処理する画像処理手段とを具備するようにした。
(もっと読む)
コンポーネントの相対変位をモニタするためのシステム
【課題】巻線端部コンポーネント対の相対変位をモニタするためのシステムの提供。
【解決手段】巻線端部コンポーネント102,104に取り付けられる構造体と構造体の非湾曲面126に取り付けられるファイバ・ブラッグ回折格子116を備える。ファイバ・ブラッグ回折格子116は、ファイバ・ブラッグ回折格子116の歪みに基づくそれぞれの波長にピーク強度を有する入射放射を反射するように構成されている。構造体は、巻線端部コンポーネント対102,104の相対変位の全範囲に渡って、構造体に生じる歪みがファイバ・ブラッグ回折格子116の歪みの大きさを所定の範囲に限定するように構成されている。
(もっと読む)
軌道用距離画像取得システム
【課題】車両の床下に配置され、レール締結装置や継目板や軌道パッドなど軌道近傍の装置の異常を検査するために使用する画像情報を走行中に取得して、異常の判定を的確に行える、軌道用距離画像取得システムを提供する。
【解決手段】レール踏面24に対する垂直面内に設置されて、レーザスリット光11をその垂直面内で照射するレーザスリット光源2と、その垂直面に対して角度を持って設置されて、レーザスリット光11による光切断画像を取得する2次元画像撮像装置2と、取得した光切断画像に基づいて2次元画像撮像装置2からの距離に基づく距離画像を生成する画像信号処理装置3とを備える。
(もっと読む)
歪センサ及び歪センサの取り付け方法
【課題】設置の際に光ファイバにかかる応力を低減することが可能な歪センサを提供する。
【解決手段】応力を受けて光ファイバ20に屈折率変化を生じさせる歪センサであって、棒状の複数のブロック10と、前記複数のブロック10のそれぞれをブロック間に間隔を空けて貫通する光ファイバ20と、を備える。
(もっと読む)
画像処理装置
【課題】本発明は撮像手段により撮像して得られた撮像対象の動画像におけるフレーム画像を取得し、取得されたフレーム画像間での前記撮像対象の濃度の動きをベクトルで表現するオプティカルフローを算出する画像処理装置を提供する。
【解決手段】本発明の画像処理装置は、前記フレーム画像における前記撮像対象のエッジを抽出し、該エッジを構成する所定点でのオプティカルフローを算出し、算出された所定点でのオプティカルフローから該所定点の奥行きを算出し、前記所定点での奥行きにFOEのY座標からの距離に応じて変化する変数を乗算して補正奥行きを算出し、前記補正奥行きから所定点における三次元情報を復元する。
(もっと読む)
光学式表面粗さ測定装置
【課題】 微小な凹凸に加えて周期と変動量の大きな凹凸が存在する測定対象物の表面粗さも検出できるようにする。
【解決手段】 測定対象物OBの表面上を接触しながら移動するスライダ44に対物レンズ305を配置するとともに、スライダ44をプローブ40によって光学ヘッド本体30に弾性的に支持する。レーザ光源301からのレーザ光を対物レンズ305により集光させて測定対象物OBの表面に照射し、測定対象物OBの表面からの反射光をフォトディテクタ308で受光して、フォーカスエラー信号を生成する。フォーカスエラー信号を用いてレーザ光の焦点位置から測定対象物OBの表面位置までの距離に応じて変化する距離を計算して、前記計算した距離に、スライダ44の光学ヘッド本体30に対する相対位置の変動量を加味して測定対象物OBの表面の基準面に対する凹凸の大きさを計算する。
(もっと読む)
光学式位置検出装置
【課題】2つの空間に位置する対象物体の各々の位置を検出することのできる光学式位置検出装置を提供すること。
【解決手段】光学式位置検出装置10には、Z軸方向の一方側Z1から他方側Z2に向けて第1検出光L1を出射する第1位置検出用光源121と、Z軸方向の他方側Z2から一方側Z1に向けて第2検出光L2を出射する第2位置検出用光源122とが配置されている。このため、第1位置検出用光源121がZ軸方向の他方側Z2に向けて第1検出光L1を出射した際、第1空間10R1に位置する対象物体Obで反射した第1検出光L1は光検出器30の第1受光素子31で受光される。また、第2位置検出用光源122がZ軸方向の一方側Z1に向けて第2検出光L2を出射した際、第2空間10R2に位置する対象物体Ob2で反射した第2検出光L2は光検出器30の第2受光素子32で受光される。
(もっと読む)
変位量計測装置、及び、変位量計測装置の姿勢角決定方法
【課題】高速な振動現象の下にあっても、エンジンマウントのマウント軸として配設されるボルトの中心の3軸並進量、及び、該ボルトの2軸回転量を高精度に算出することができる、変位量計測装置、及び、変位量計測装置の姿勢角決定方法を提供する。
【解決手段】エンジンマウント10のマウント軸であるボルト12の両端に固定した、半径が既知である2個の球体13・13の変位を、それぞれについて3箇所ずつレーザー変位計31〜33、34〜36で計測する球体変位計測工程と、球体変位計測工程で計測した球体13・13の変位結果に基づいて、球体13・13の中心I・Jの3次元座標X1・X2をそれぞれ算出する座標算出工程と、座標算出工程で算出した2個の3次元座標X1・X2に基づいて、ボルト12の中心Kの3軸並進量、及び、ボルト12の2軸回転量θ・φを算出するマウント軸変位算出工程とを備える。
(もっと読む)
コンクリート製軌道の軌道狂い測定方法および測定装置
【課題】
コンクリート軌道表面の凹凸に影響され難くかつ段差等の軌道の急峻な位置変化に対して対応可能でかつ検測車両の走行状態で高低狂い、通り狂い等の測定を行うことができるコンクリート製軌道の軌道狂い測定方法および測定装置を提供することにある。
【解決手段】
この発明は、検測車両の走行状態におけるコンクリート製軌道の軌道狂い測定において、距離検出器から得られるデジタル値の測定信号の測定値に対してコンクリート表面の凹凸を除去する幅を設定したメディアンフィルタ処理を行い、メディアンフィルタ処理により得られた測定値に基づいてモノレールの軌道狂い量の算出を行うものである。
(もっと読む)
光ファイバーセンサーの設置装置
【課題】 簡便に、かつ正確に取り付けることができる光ファイバーセンサー設置装置を提供する。
【解決手段】 光ファイバーセンサーの設置装置において、磁性を有する対象物3と、この対象物3に固定される磁性吸着体からなる台座2と、この台座2上に装着される光ファイバーセンサー1とを具備する。
(もっと読む)
タービンブレードの振動応答を測定するシステム及び方法
【課題】タービンブレードの振動応答を測定する方法を提供する。
【解決手段】この方法は、複数のタービンブレード106のうち、少なくとも1つのタービンブレードの後縁部表面に対して約+15度又は約−15度の範囲で実質的に平行な、少なくとも1つのプローブチップ光学表面を特徴とする光プローブ114を取り付けるステップと、複数のタービンブレード106のうち少なくとも1つのタービンブレードの後縁部表面に向かって光を導くステップと、複数のタービンブレード106のうち少なくとも1つのタービンブレードから反射される光を受け取るステップと、少なくとも部分的に反射光に基づいて、複数のタービンブレード106のうち少なくとも1つのタービンブレードの相対位置を判定するステップを含む。
(もっと読む)
3次元計測装置及びその制御方法
【課題】コード化パターンの投影を用いた3次元位置計測を高速に行なえるようにする。
【解決手段】計測対象物体の位置姿勢を計測する3次元計測装置は、計測対象物体に投影するパターンを生成し、生成された複数種類のパターンを投影部により計測対象物体に投影して撮像部により撮影するとともに、投影したパターンと計測対象物体の形状モデルと計測対象物体の概略位置姿勢を示す情報とに基づいて、撮像により取得される撮像画像上のパターンの座標値を算出する。そして、算出された座標値を利用して、撮像画像上の撮影されたパターンと前記投影部により投影されたパターンとを対応づけし、計測対象物体に投影されたパターンと撮像部との距離を求める。また、求めた距離と当該計測対象物体の形状モデルとを用いて計測対象物体の位置姿勢を推定し、概略位置姿勢の情報を更新する。
(もっと読む)
エンジンマウントの変位量計測装置
【課題】高速な振動現象の下にあっても、エンジンマウントのマウント軸として配設されるボルトの中心の3軸並進量、及び、該ボルトの2軸回転量を高精度に算出することができる、エンジンマウントの変位量計測方法、及び、エンジンマウントの変位量計測装置を提供する。
【解決手段】エンジンマウント10のマウント軸であるボルト12の両端に固定した、半径が既知である2個の球体13・13の変位を、それぞれについて3箇所ずつレーザー変位計31〜33、34〜36で計測する球体変位計測工程と、球体変位計測工程で計測した球体13・13の変位結果に基づいて、球体13・13の中心I・Jの3次元座標X1・X2をそれぞれ算出する座標算出工程と、座標算出工程で算出した2個の3次元座標X1・X2に基づいて、ボルト12の中心Kの3軸並進量、及び、ボルト12の2軸回転量θ・φを算出するマウント軸変位算出工程とを備える。
(もっと読む)
画像処理方法
【課題】 立体的な対象物の3次元形状を計測する際に問題となる画像中に観測される輝度値の変動領域の判定を行う画像処理方法を提供する。
【解決手段】 画像処理方法は、対象物Qを照射装置F1で照明し、カメラC1によって撮像した2次元画像データFD12を得る第一撮像工程と、同一のカメラC1によって同一の対象物Qを異なる照明位置から照明装置F2で照明して撮像した2次元画像データFD13を得る第二撮像工程とを行い、2次元画像データFD12とFD13とから反射光量による輝度値の差分データを生成し、この差分データの平均値を基準に標準偏差を閾値にして、閾値以上の輝度を示す差分データを対象物Qの画像データの変動領域と判定する抽出工程とを具備し、対象物Qの3次元形状データが正確に生成される効果を奏する。
(もっと読む)
センサ固定具
【課題】ロボット等に使用される複数個のセンサからなるセンサ装置において、複数個のセンサで形成される指向領域がつながるようにセンサを配置すること可能とするセンサ固定具を提供することを課題とする。
【解決手段】本発明のセンサ固定具は、複数のセンサを固定可能なセンサ固定具であって、複数のセンサをその上下から挟み固定する為の挟持部材と、センサと挟持部材とを固定する為の連結部材とを備え、挟持部材は挟持部を有し、該挟持部材の挟持部が、センサの被挟持部と対応な形状となっていることを特徴とする。
(もっと読む)
61 - 80 / 320
[ Back to top ]