
Fターム[2F065PP01]の内容
光学的手段による測長装置 (194,290) | 装置全体の構造 (6,881) | 検出器の支持、保持関連 (1,622)
Fターム[2F065PP01]の下位に属するFターム
Fターム[2F065PP01]に分類される特許
81 - 100 / 320
光ファイバセンサ
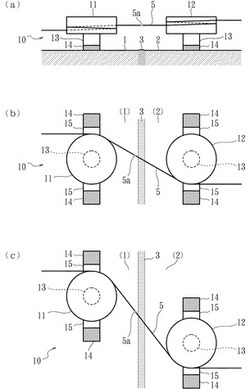
【課題】溶接部などの局所的な歪を近傍域内で測定するのに適した態様でFBG形成済み光ファイバを組み込む。
【解決手段】周面が形成された巻付部材11と、周面が形成された巻付部材12と、両巻付部材11,12の各周面に巻き付けられており両巻付部材間に張られた部分にFBG5aが形成されている光ファイバ5と、被測定物の歪発生部3の両側に分かれて固設され一方側1で巻付部材11を支持し他方側2で巻付部材12を支持する支持部13〜15とを備える。光ファイバ5の巻き方は巻付部材11,12で逆巻きにする。
(もっと読む)
障害物検出装置

【課題】障害物と判定できる対象の多様性を確保しつつ、路面等の対象の変化に対して誤判定を生じにくくする。
【解決手段】障害物検出装置は、カメラで撮影した路面Rの入力画像(カラー静止画像)をフレームFに則して複数の領域に分割し、これら分割領域毎に入力ファクターとして平均輝度や平均彩度を抽出する。そして、入力ファクターに基づいて基準空間における距離を演算し、この距離が閾値を超える場合に障害物があると判定する。
(もっと読む)
距離計測装置及び距離計測方法
【課題】車載単眼カメラを用いて、道路上にある案内看板や標識など対象物との距離を高精度に測定できる距離計測装置及び方法を提供する。
【解決手段】距離計測装置は、単眼カメラが撮影した異なるフレームの画像が入力され、その画像から対象物を検出する対象物検出部101と、対象物の2フレーム以上の画像を蓄積する対象物検出結果蓄積部102と、検出した対象物の画像上の長さまたは画素数などを算出する対象物スケール算出部103と、対象物の向きを対象物の特徴点から算出する対象物向き算出部104と、算出した対象物の向きおよび入力される車速センサーの車速情報に基づいて、車両が対象物に指向する速度を算出する対象物指向速度算出部105と、算出した対象物指向速度および算出した対象物の画像上のスケールに基づいて、対象物までの距離を計算し出力する対象物距離算出部106とを有する。
(もっと読む)
蒸気タービン内の液滴計測装置
【課題】蒸気流を阻害しない構造であって、多方向に飛散する液滴を迅速かつ高精度に計測できる蒸気タービン内の液滴計測装置を提供する。
【解決手段】光ファイバ1に液滴Dが当たることにより液滴径と速度を計測する蒸気タービン内の液滴計測装置において、光ファイバ1を内部に格納する液滴防護筒2と、液滴防護筒2の内部で光ファイバ1を支持する支持板41とを備え、支持板41に液滴流出孔51を設けた。
(もっと読む)
織物への光ファイバーの編み込みによる強化センサー
【課題】測定対象物に取り付ける際に光ファイバーが折れたり、破断したりするのを防止すると共に、計測精度の向上を図る。
【解決手段】本発明に係るセンサー10は、縦糸11に略直交するように横糸12が織り込まれて形成された織物13を備え、織物13の縦糸11と横糸12のうちの少なくともいずれか一方の繊維に光ファイバー14が含まれていることを特徴とし、光ファイバー14はFBGセンサーとして機能してもよい。
(もっと読む)
変位分布計測方法、装置及びプログラム
【課題】計測物体の変位分布を高速に計測するとともに小型化が可能な変位分布計測方法、装置及びプログラムを提供する。
【解決手段】本発明による変位分布計測装置(1)は、所定の波長の光を照射するレーザ光源(11)と、照射された光を物体光と参照光とに分離するビームスプリッタ(14)と、参照光の位相を所定量だけシフトさせるミラー付きPZTステージ(20)と、位相シフトされた参照光を複数に分岐するペリクルビームスプリッタ(17,18)と、計測物体(23)により散乱された物体光と、分岐された参照光との干渉縞を撮影するCCDセンサ(15,16)とを備えることを特徴とする。
(もっと読む)
非接触物体検査
物体のエリアのトポグラフィを、物体上に投影されたパターンの位相の解析を介して検査する非接触方法である。その方法は、第1のパースペクティブから獲得された、光学的パターンが投影される物体の第1の画像を取得するステップと、第2のパースペクティブから獲得された、光学的パターンが投影される物体の第2の画像を取得するステップであって、第2の画像内の物体上に当たるときの光学的パターンは、第1の画像内の光学的パターンとは異なる、ステップとを含む。その方法は、第1の画像内に映し出された光学的パターンの少なくとも1つの領域の位相に関する位相データに基づいて、物体の少なくとも1つの領域のトポグラフィを記述するデータを決定するステップをさらに含む。第2の画像内に映し出された物体の対応する領域から獲得した位相データは、第1の画像から獲得した位相データまたはトポグラフィデータのあらゆる曖昧性を解決するために使用される。
 (もっと読む)
(もっと読む)
突出形状測定装置および突出形状測定方法およびプログラム
【課題】測定対象の突部の突出形状を容易かつ精度良く測定する。
【解決手段】ロータリーダイカッター10のダイカットロール20の刃型22の突出形状を測定する突出形状測定装置1は、ロータリーダイカッター10が載置された走査ステージ16をダイカットロール20の回転軸線Nの軸線方向に移動させる駆動装置14と、走査時に変位計11から逐次出力される変位出力Yおよび受光量LIの走査位置xに応じた変化を検出する変位出力取得部52および受光量取得部53と、受光量LIが最大の走査位置xでの変位出力Yにより刃型22の刃先突出高さを検出する突出高さ算出部54と、走査位置xに応じた受光量LIの変化に係る状態量の検出値と、刃型22の刃先幅および状態量をパラメータとして作成したモデルデータとを比較し、状態量の検出値に対応するモデルデータから刃先幅を検出する突出幅算出部55とを備える。
(もっと読む)
コンクリート構造物の歪み検出装置
【目的】いわゆる金属を使用しない腐食に強い起歪体を形成し、もって外装材により起歪体を保護する必要がなく、コンクリートに起歪体を直接接触させられ、かつコンクリートのひずみを起歪体周囲の付着力により直接起歪体に伝達できるため、計測値につきばらつきのない高品質で破損や故障の少ない長期間の計測が可能なひずみ検出装置を提供し、さらに、長大構造物に対しても劣化の可能性が少なく、かつ精度よくコンクリート構造物の内部温度が計測できる内部温度検出装置をすることを目的とする
【構成】FBGセンサが設けられた光ファイバを、光ファイバと略同等の線膨張係数、弾性係数を有するガラス繊維部材で被覆して起歪体を形成し、起歪体をあらかじめ内部設置した状態で、コンクリートを打設して構造物を構築し、コンクリート構造物の構築後生ずる歪みを検出可能とした、ことを特徴とする。
(もっと読む)
三次元計測装置、及び三次元計測方法
【課題】演算負担を軽減しつつ、表面形状の検出精度を向上させる。
【解決手段】先ず第一の照射パターンを計測対象に向けて照射し(ステップS2)、計測対象に映る反射パターンを撮像する。そして、計測対象における注目領域の座標Gを算出し(ステップS8)、照射パターンの空間周波数に対する反射パターンの変化度合(dα/dθ)を算出する(ステップS9)。そして、座標Gと変化度合(dα/dθ)とに応じて、注目領域におけるX軸周りの傾きβ1を算出する(ステップS10)。第一の照射パターンを照射した全ての領域でX軸周りの傾きβ1を算出できたら(ステップS12の判定が“Yes”)、今度は第二の照射パターンを照射する(ステップS4)。以降は、第一の照射パターンと同様に、注目領域におけるY軸周りの傾きβ2を算出し、第二の照射パターンを照射した全ての領域で行う。
(もっと読む)
三次元形状計測装置および半導体集積回路
【課題】低コストで車載環境における周辺監視手段での利用に適した光切断法による三次元形状計測装置を提供する。
【解決手段】光源列310と、監視領域を撮像するカメラ200と、カメラ200および光源列310に対するインタフェースとCPU110とを有する画像認識部100とを有し、光切断法により立体物500の三次元形状を計測する三次元形状計測装置1であって、画像認識部100は、光源列310から照射された光を各光源320から照射された光の光源中心を結ぶ線分を含む照射パターンで照射するスリット光とみなし、擬似スリット光420が照射された監視領域について撮像された画像データから、各画素ラインの輝度データに基づいて推定した擬似スリット光420の照射位置の情報と照射パターンとの差分に基づいて照射位置におけるカメラ200からの距離を算出し、立体物500の擬似スリット光420による切断面形状を計測する。
(もっと読む)
移動体装置、露光装置及び露光方法、並びにデバイス製造方法
【課題】 粗微動ステージにおいて、微動ステージの位置を高精度に計測する。
【解決手段】 粗動ステージWCSに保持された微動ステージWFSのXY平面内での位置情報の計測には、微動ステージのXY平面に実質的に平行な一面に配置されたグレーティングRGに対向して配置され、該グレーティングに計測ビームを照射するヘッドを含むエンコーダシステムが用いられる。そして、微動ステージは、駆動系によって、エンコーダシステムで計測された位置情報に基づいて、単独で、若しくは粗動ステージと一体で駆動される。この場合、エンコーダシステムのヘッドを微動ステージ(グレーティング)に近接して配置することができ、これにより、エンコーダシステムによる微動ステージの位置情報の高精度な計測が可能になる。
(もっと読む)
移動体装置及び移動体駆動方法、露光装置及び露光方法、並びにデバイス製造方法
【課題】移動体を精度良く駆動する。
【解決手段】 駆動系により、アーム部材71から移動体WFSのXY平面に平行な一面に配置されたグレーティングRGに対して計測ビームを照射して移動体のXY平面内の位置を計測する第1計測系の計測結果と、レーザ干渉計を用いてアーム部材71の変動を計測する第2計測系の計測結果と、に基づいて移動体が駆動される。この場合、駆動系は、第1計測系の計測結果に含まれるアーム部材の変動に起因する計測誤差を、第2計測系の計測結果を用いて補正する。
(もっと読む)
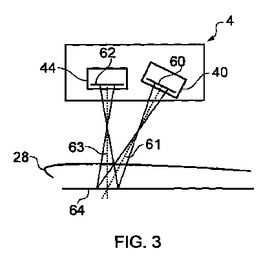
街路環境内の3Dモデルを評価するための方法及び装置
【課題】 立体センサ技術を使用して街路環境内の3D−モデルを評価するための方法を提供する。
【解決手段】 この方法では、含まれたセンサは対で配置されている。本発明はまた、立体センサ技術を使用して街路環境内の3D−モデルを評価するための装置に関し、それはブラケット(33)上に取り付けられた少なくとも一対のセンサ(16,17,18)を含み、センサの各対は共通面内に位置されている。本発明は、困難なコントラスト条件下の立体効果を測定する問題を解決する。また、本発明によれば、含まれた各対のセンサが、画像面内のコントラストの低レベルが避けられるようにコントラスト情報に基づいて位置される方法が提案される。含まれた対のセンサ(16,17,18)が、センサ対(16,17,18)のセンサ(16a,16b,17a,17b,18a,18b)が互いから離れて水平に位置され、センサの一方がブラケット(33)の水平面の上に、他方が水平面(22)の下に位置されるようにブラケット(33)の本質的に水平な面(22)に対して相互に位置されることを含む装置が提案される。
(もっと読む)
温度画像の三次元化装置
【課題】コンピュータ上で深さ方向の温度分布を対象物体を回転しながら確認することができる温度画像の三次元化装置を提供する。
【解決手段】既知の座標を有する複数の豆電球22を基準点とする基準物21と、対象物1及び基準物21からの発熱に基づいて対象物1の三次元情報を取得する三次元情報取得手段27と、実座標と温度画像座標とのキャリブレーションを行なう座標キャリブレーション手段31と、実座標から温度画像情報の温度画像座標への変換式を決定する変換式決定手段32と、決定された変換式に基づいて対象物1の三次元情報に係る全ての実座標を温度画像座標に変換する座標変換手段33と、変換された三次元情報の温度画像座標に基づいて三次元情報の温度情報を抽出する温度情報抽出手段34と、温度画像情報中の特定の温度画像座標と三次元情報中の特定の実座標とを対応付ける座標対応付手段35と、を備えて構成されている。
(もっと読む)
情報処理装置及びキャリブレーション処理方法
【課題】カメラ内部パラメータやカメラ間の相対位置姿勢が変化した場合に、仮想現実空間の表示が観察者へ悪影響を及ぼすことを未然に防ぐことを可能とする。
【解決手段】
主撮像装置と副撮像装置により現実空間を撮影して得られた画像に仮想画像を合成して立体視のための画像を提供する情報処理装置は、主撮像装置の位置姿勢を計測し、保持部により保持されている装置間位置姿勢情報と計測された主撮像装置の位置姿勢とに基づいて副撮像装置の位置姿勢を算出し、計測された主撮像装置の位置姿勢と算出された副撮像装置の位置姿勢と保持されている主撮像装置及び副撮像装置の内部パラメータとを用いて、主、副撮像装置のそれぞれから得られた画像に仮想画像を合成する。情報処理装置は、主、副撮像装置により撮像された画像に基づいて、保持されている装置間位置姿勢情報や内部パラメータの情報の正当性を判断し、不当と判断した場合には保持されている情報を校正する。
(もっと読む)
電子機器
【課題】 光ファイバーセンサを機器内部に設けて、機器内部の歪みおよび温度を直接的に計測可能とした、電子機器を得ることを目的とする。
【解決手段】 筐体と、上記筐体の内部に、互いに間隔を空けて収納される複数の基板と、上記各基板の表面にそれぞれ固着され、温度計測用のファイバーグレーティングと歪み計測用のファイバーグレーティングとを複数個所有し、上記基板に一筆書きで配線された光ファイバーセンサとを備えて、電子機器を構成する。
(もっと読む)
道路形状認識装置
【課題】実際の道路形状を的確に検出することが可能な道路形状認識装置を提供する。
【解決手段】道路形状認識装置1は、自車両が走行する道路面について実空間上の距離Zと高さYの情報を有する距離データDを互いに異なる複数の地点で検出する距離高さ検出手段6と、複数の距離データDを自車両に近い側の群G1と遠い側の群G2とに分割し、群G1、G2の境界DL部分の距離データDを一方の群から他方の群に移し替えるごとに距離データDの近似直線L1、L2を算出する近似直線算出手段10と、距離データDを移し替えた群G1、G2ごとにそれぞれの近似直線L1、L2に基づく統計値をそれぞれ算出する統計値算出手段11と、統計値に基づいて近似直線L1、L2の組み合わせの中から1つを選択し、選択した近似直線L1、L2の組み合わせを用いて道路形状モデルを生成する道路形状モデル生成手段12とを備える。
(もっと読む)
地盤歪検出端
【課題】 地盤に形成した深い穴内に容易に設置することができ、地盤歪を高精度で検出可能な地盤歪検出端を提供する。
【解決手段】 複数の短尺管体15をつなぎ合わせて変位標識管体5を形成し、その変位標識管体5に沿って光ファイバセンサ6を張力を掛けた状態で配置し且つその光ファイバセンサ6の複数個所を固定治具7で変位標識管体5に固定して検出端3を構成する。この検出端3は、短尺管体15をつなぎ合わせながら且つ光ファイバセンサ6を固定しながら縦穴2内に挿入することで深い縦穴2内に容易に設置可能であり、挿入した後は縦穴2内に充填材8を充填して地盤と一体化することで、地盤歪に応じて光ファイバセンサ6に歪を生じ、それを散乱光強度分布の観測で検出することで地盤に発生した歪分布を精度良く測定できる。
(もっと読む)
光ファイバセンサ及びこれを備えた検出装置
【課題】所定の経路に沿った2点間の変位を再現性良く検出可能な光ファイバセンサを提供する。
【解決手段】光ファイバセンサ1は、ヘテロコア部HPが第1点と第2点との間に位置するよう、第1点と第2点とに固定された光ファイバ3と、光ファイバ3のヘテロコア部HPと第2点との間の一部が固定され、摺動可能な光ファイバ固定部材4bと、光ファイバ固定部材4bを第1点に向けて付勢する付勢手段5と、光ファイバ固定部材4bに固定された部分と第1点との間における光ファイバの変形3を、所定の薄厚空間S内に規制する規制部材6とを備える。光ファイバセンサ1は、所定の経路に沿った第1点と第2点との間の変位が検出可能である。
(もっと読む)
81 - 100 / 320
[ Back to top ]