
Fターム[2F112DA25]の内容
Fターム[2F112DA25]に分類される特許
21 - 40 / 559
レーザレーダ装置
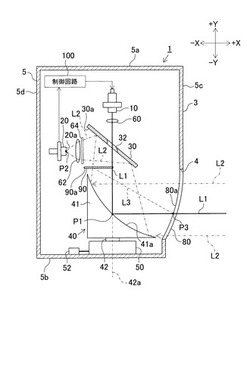
【課題】カバーで生じる内部反射光(外乱光)が受光センサに入り込むことをより確実に抑制することができ、外乱光に起因する誤検出を効果的に防止し得る構成を提供する。
【解決手段】レーザレーダ装置1では、フォトダイオード20の受光面20aの前方側且つ下方側にフィルタ部材90が配置され、このフィルタ部材90は、当該フィルタ部材90の下面90aとのなす角度が小さくなる光ほど透過を抑制する角度依存性を有すると共に、透過板80から受光センサ側に向かう斜め方向の外乱光の透過を抑制するように構成されている。また、上記フィルタ部材90は、上下方向の光については透過するように構成されているため、凹面鏡41によって上方に導かれる正規の反射光(外部空間の物体からの反射光)については、フィルタ部材90を透過する際に抑制されにくくなる。
(もっと読む)
半導体装置の駆動方法

【課題】画素の微細化を達成しつつ、2次元撮像及び3次元撮像の同時撮像を可能にした半導体装置の駆動方法を提供する。また、高精度な移動体の位置検出を可能にした半導体装置の駆動方法を提供する。
【解決手段】同一の照射時間の第1の照射及び第2の照射を行い、第1の照射及び第2の照射に対応させて、第1の撮像及び第2の撮像を行い、第1の撮像及び第2の撮像において、光の到着時間の時間差に依存した第1の検出信号及び第2の検出信号を取得することで、光源から被検出物までの距離を測定する。また、可視光を吸収し、赤外光を透過する第1のフォトセンサ、及び赤外光を吸収する第2のフォトセンサを重畳することで2次元撮像及び3次元撮像の同時撮像を可能にする。また、隣接するフォトセンサで被検出物のほぼ同一点からの反射光を検出する事で、高速で移動する被検出物においても位置検出精度の低下を防げる。
(もっと読む)
対象物との相対位置計測方法と装置
【課題】向きの変更と移動の少なくとも一方を行う動作体から、対象物との相対位置を高精度に計測できる手段を提供する。
【解決手段】動作体3に設置したレーザ距離センサにより、各被計測点の位置を動作体座標系で表わされた座標値を取得する。動作体3に設置した撮像装置により、対象物5が含まれる領域を撮像して画像を生成する。画像において、対象物5に取り付けられた指標の位置を特定し、この位置に基づいて、撮像時において対象物5の方向を特定する。距離計測時の動作体3の向きと位置に対する撮像時の動作体3の相対的な向きθと位置Δx,Δyに従って、各被計測点の座標値を、距離計測時の動作体座標系の座標値から撮像時の動作体座標系の座標値に変換する。画像内の指標の位置に対応する、変換後の座標値を特定し、この座標値に基づいて、撮像時における動作体3から対象物5までの距離を求める。
(もっと読む)
距離測定装置及び軌道周辺支障物検出装置
【課題】太陽光などの投光波長以外の光を極限まで制限して、投光波長のみを受光できるようにする。
【解決手段】干渉膜を使った平面板の干渉フィルタを用いて広い視野の検出手段を構成すると、平面板の干渉フィルタへの入射角に応じて透過帯域の移動が起こり、所望の信号強度を得ることが困難となる。この発明は、干渉フィルタの形状を球面状にして全視野の受光光線を干渉フィルタの入射面に対して垂直に入射するようにして、透過帯の移動をなくし、所望の信号強度を得るようにした。また、受光レンズの第一主点と球面状干渉フィルタの球面中心とを一致させて配置することにより、干渉フィルタへ入射する反射光の入射角を0°にして透過帯域が変化しないようにした。
(もっと読む)
距離画像生成装置
【課題】光飛行時間型距離画像センサを用いて撮影空間の距離画像生成する際、撮影空間内の状況によらず、距離計測の精度を高める。
【解決手段】距離画像と同タイミングで生成した同撮像空間の照射光強度画像を用い、撮影空間に他の画素の画素値算出に影響を与える程入射光(反射光)強度の強い領域があるか否かを判別する。反射光の強い領域がある場合、その領域への照射と他の領域への照射とを独立して制御する分割照射を行うよう光源を制御する。判別は、照射光強度画像の各画素値を予め定めた閾値と比較することにより行う。
(もっと読む)
計測装置、計測方法、及びプログラム
【課題】平坦でない路面上に存在する対象物の高さを正確に計算することができる計測装置、計測方法、及びプログラムを提供する。
【解決手段】センサ情報取得部21は、基準位置から路面上の複数の点へ向けてレーザを射出し、当該レーザの反射光に基づいて、基準位置から当該レーザが反射された点である反射点までの距離を計測するレーザセンサから計測結果を取得する。路面高特定部23は、記憶部22が記憶する路面高情報に基づいて反射点それぞれにおける路面高を特定する。高さ算出部29は、レーザセンサが算出したそれぞれの距離と路面高特定部23が特定した路面高とに基づいて、路面から前記反射点までの長さを対象物の高さとして算出する。
(もっと読む)
光走査装置
【課題】投光タイミングのテーブルがなくても、容易に、光ビームの照射対象領域の各画素に光ビームを照射することができる光走査装置を提供する。
【解決手段】反射ミラーを互いに直交する第1軸及び第2軸の各軸回りに揺動し、光ビームを照射対象領域内でリサージュ走査可能に形成された光走査部1と、各軸回りの揺動位相を検出する位相検出部2と、反射ミラーに光ビームを投光する光源部3と、第2軸回りの揺動周期Tyの半周期におけるリサージュ走査軌跡に、第1軸回りの走査方向で互いに略平行な走査線対S,Sが存在するように、各軸回りの揺動周期Tx,Tyを設定し、Tyの半周期毎に第2軸回りの走査振幅を一定量ずつ変化させ、光走査部1を駆動させる走査制御部4と、位相検出部2で検出する揺動位相に基づいて走査線対S,Sの走査時に対応する位相区間だけ、光源部3から光ビームを投光させる光源制御部5と、を備える。
(もっと読む)
対象物検出装置
【課題】光検出手段としてフォトダイオードやフォトトランジスタを用い、光検出手段と電極間とのインピーダンスから、測定対象物の電気特定及び光特性を同時に測定する対象物検出装置を提供する。
【解決手段】測定対象物20の方向に対して光を照射するLED3aと、照射した光の反射光を受光して電気的な信号に変換するフォトダイオード3bと、フォトダイオード3bに並列に接続し、所定の間隔で離隔配設される1対の電極2a,2bと、フォトダイオード3a及び電極2a,2bに接続する交流電源と、並列に接続されるフォトダイオード3a及び電極2a,2b間のインピーダンスを測定するインピーダンス測定部42と、測定対象物20の電気特性及び光特性に関する情報を予め記憶する対象情報記憶部45と、測定したインピーダンスの値と、記憶されている測定対象物20に関する情報とから、測定対象物20の材質及び/又は接近距離を判別する対象物判別部43とを備える。
(もっと読む)
障害物検出方法及び障害物検出装置
【課題】レーザ光の照射効率を向上させるとともに、垂直方向の分解能を向上させることができる障害物検出方法及び障害物検出装置を提供する。
【解決手段】レーザ光を投受光するレーザレーダ1を設置する設置工程(SP101)と、監視範囲Aに向かってレーザ光を照射して監視範囲Aの位置を特定する監視範囲位置特定工程(SP102)と、レーザレーダ1の俯角φ0を調整する俯角調整工程(SP103)と、監視範囲Aにおける垂直走査角度の最小値φminを算出する最小値算出工程(SP104)と、監視範囲Aにおける垂直走査角度の最大値φmaxを算出する最大値算出工程(SP105)と、垂直走査角度の最小値φmin及び最大値φmaxに基づいてレーザレーダ1の垂直画角Δφを設定する垂直画角設定工程(SP106)と、を有し、垂直画角Δφの範囲内でレーザ光を垂直方向に走査させて障害物Tを検出する。
(もっと読む)
距離測定装置
【課題】 反射光の受光レベルが飽和状態となるときでも精度良く距離を測定できる距離測定装置を提供する。
【解決手段】 距離測定装置の発光部は、測定光を被測定物に向かって出射する。受光部は、被測定物から反射される反射光を受光する。距離算出部は、測定光が出射されたときから反射光の受光レベルがピークを示す時点までの経過時間に基づいて被測定物までの距離を求める。距離補正部は、受光レベルが飽和状態となりピークの時点が特定できないときには、受光レベルが飽和している時間の長さに応じて被測定物までの距離の値を補正する。
(もっと読む)
レーザレーダ装置
【課題】遠距離の監視範囲や遠近差の大きな監視範囲であっても、精度よく監視範囲内における物体を検出可能なレーザレーダ装置を提供する。
【解決手段】レーザ光Liを投光する投光部11と、レーザ光Liを垂直方向Vに走査させる垂直スキャナ12と、レーザ光Liを水平方向Hに走査させる水平スキャナ13と、レーザ光Liの反射光Lrを受光して受光情報d4を発信する受光部14と、受光情報d4から物体Mの距離Lpを算出する距離演算部15と、投光部11、垂直スキャナ12及び水平スキャナ13の制御を行う制御部16と、監視範囲Sにおける遠近距離に応じてレーザ光Liの透過率δを調整する強度調整フィルタ17と、を有し、強度調整フィルタ17は、遠距離に照射するレーザ光Liの透過率δを高くし、近距離に照射するレーザ光Liの透過率δを低くするように構成されている。
(もっと読む)
光波距離測定方法及び光波距離装置
【課題】パルス光を利用した光波距離測定に於いて簡単で而も高精度の測距が行える光波距離測定方法及び光波距離装置を提供する。
【解決手段】測距光路と、内部参照光路と、パルス光を発するパルス発光光源と、パルス光を測距パルス光と内部参照パルス光とし、測距パルス光及び前記内部参照パルス光を受光して受光信号を発する受光検出器6と、該受光検出器からの受光信号に基づき測定対象物迄の距離を演算する計測部4とを具備し、該計測部は、内部参照パルス光と測定対象物で反射された測距パルス光との受光時間差に基づき粗測距を行い、前記受光検出器が出力する内部参照パルス光の受光波形、測距パルス光の受光波形をそれぞれフーリエ変換し、複数の周波数成分に分解し、得られた周波数成分毎に位相差を求め、位相差から得られる時間差に基づき精密測距を行い、粗測距と精密測距とを加算して測定対象物迄の距離を測定する。
(もっと読む)
走査型検出測定装置、及び測定方法
【課題】簡素な構成を採用しつつ検出光量ムラの発生を抑制可能とした走査型検出測定装置を提供する。
【解決手段】本発明の走査型検出測定装置は、レーザ光を射出する発光素子と、発光素子から供給されるレーザ光を走査しつつ標本に照射する走査光学系と、標本から生じる光を検出する検出光学系と、発光素子と走査光学系との間に設けられレーザ光の一部を発光素子に向けて反射させる反射光学素子と、を有することを特徴とする。
(もっと読む)
物体検出装置および情報取得装置
【課題】透過率の再現性が高い分光素子を用いながら、適正にレーザ光源の光量制御が可能な情報取得装置およびこれを搭載する物体検出装置を提供する。
【解決手段】情報取得装置1は、発光装置10と、受光装置20と、を備える。発光装置10は、レーザ光源110と、コリメータレンズ120と、リーケージミラー130と、リーケージミラー130によって反射されたレーザ光をドットパターンを有するレーザ光に変換するDOE140と、リーケージミラー130を透過したレーザ光を受光して受光量に応じた検出信号を出力するFMD160と、リーケージミラー130とFMD160との間に配置され、リーケージミラー130を透過したレーザ光の光量を減衰させるフィルタ150と、FMD160の検出信号に基づいて、レーザ光源110の発光量を制御するAPC制御部21bと、を有する。
(もっと読む)
距離計測方法および装置
【課題】 本発明は,複数の周波数を発振する光源からの光を光変調器を用いて光ビートダウンして,低周波にて位相検出することにより、装置コストを上げずに測定精度高めることを目的とする。
【解決手段】 本発明は複数の異なる周波数の光を発振する光源と、前記光源からの光と、測定対象に照射されてから反射された前記光源からの光との周波数を変調する光変調器と、前記光変調器に電圧信号を入力する発振器と、前記光変調器により変調された光信号を検出する検出器と、前記検出器により検出された光信号の位相から距離を算出する距離演算回路とを備えることを特徴とする距離計測装置を提供する。
(もっと読む)
レーザ測距装置
【課題】簡易な構成により、測距誤差を補正する。
【解決手段】レーザ送受信部(レーザ光走査部103と受信部104)は、既定の位置に設置され、既定の測距対象面に既定の仰角にて対向し、出射角度を変化させながら測距対象面にレーザ光を出射し、反射光を受光する。基準反射板6は、レーザ光が照射される位置に配置され、レーザ光を反射する。位相検波器9は、反射光に基づき、測距対象面においてレーザ光を反射した各反射点での位相値を検出するとともに、基準反射板6での位相値を検出する。距離補正装置11は、レーザ送受信部と測距対象面との位置関係と、レーザ送受信部の仰角と、各々のレーザ光出射時の出射角度とに基づき、各反射点での位相値を算出し、位相検波器9により検出された各反射点での位相値と基準反射板6での位相値と、算出した各反射点での位相値とを用いて、補正値を算出する。
(もっと読む)
距離測定装置およびそれを備えた輸送機器
【課題】対象物までの距離を高い精度で測定することが可能であるとともに低コスト化が実現された距離測定装置およびそれを備えた輸送機器を提供する。
【解決手段】距離測定装置から対象物に光が発射される。受光部により発射光および対象物からの反射光が受光され、発射光パルスPeおよび反射光パルスPrを含む受光信号REが出力される。受光信号REに基づいて発射光の受光時点および反射光の受光時点が検出される。発射光の受光時点から反射光の受光時点よりも後の時点teまで一定の電圧を維持する第1矩形波信号LS1が生成され、第1矩形波信号LS1が積分される。反射光の受光時点から時点teまで一定の電圧を維持する第2矩形波信号LS2が生成され、第2矩形波信号LS2が積分される。第1矩形波信号LS1の積分結果と第2矩形波信号LS2の積分結果との差に基づいて対象物までの距離が算出される。
(もっと読む)
光学式測定装置
【課題】光学式測定装置において、測定性能を高める。
【解決手段】光学式測定装置1は、第1の受光レンズ11と、この第1の受光レンズ11の周囲に配置された環状の第2の受光レンズ12と、光を検出する光検出器15と、光学素子13と、を具備する。この光学素子13は、第1の受光レンズ11により受光された光、および第2の受光レンズ12により受光された光L1,L2を光検出器15に導光する導波路13aを含む。この導波路13aは、光を反射する反射面13bで形成され、光検出器15に近づくほど断面積が小さくなる。
(もっと読む)
レーザレーダ装置
【課題】レーザレーダ装置以外の他の距離測定装置を備えずに、高い距離測定精度と広い測定可能距離間隔を有するレーザレーダ装置を提供する。
【解決手段】 レーザ光を目標に向けて発振し、目標からの反射光を受信して受信信号に変換する光送受信部10と、あらかじめ設定された測定可能時間間隔に基づき、光送受信部10によるレーザ光の発振から反射光の受信までの時間を測定することでレーザ光の照射点までの距離を示す距離信号を算出すると共に、レーザ光の照射点からのレーザ光の反射光強度を示す強度信号を算出する距離強度算出部20と、距離強度算出部20により算出された距離信号及び強度信号に基づきあらかじめ設定された測定可能時間間隔より狭い測定可能時間間隔を設定する信号処理部30とを備え、距離強度算出部20は信号処理部30により設定された狭い測定可能時間間隔に基づいて距離信号を算出する。
(もっと読む)
自律移動システム、その制御方法及びプログラム
【課題】距離検出手段の揺動範囲を適切に設定し、最適に障害物を検知できる自律移動システム、その制御方法及びプログラムを提供すること。
【解決手段】自律移動システムは、移動体に設けられ、検出領域内の障害物の距離を検出する距離検出手段と、距離検出手段の検出領域をヨー方向へ揺動させる揺動手段と、揺動手段の揺動を制御する揺動制御手段と、を備えている。また、揺動制御手段は、障害物の位置に応じて、揺動手段を制御して距離検出手段の検出領域の揺動範囲を制限している。
(もっと読む)
21 - 40 / 559
[ Back to top ]