
Fターム[2F129HH17]の内容
航行(Navigation) (246,646) | 構造・構成 (43,107) | 記憶手段 (18,365)
Fターム[2F129HH17]の下位に属するFターム
Fターム[2F129HH17]に分類される特許
281 - 300 / 767
制約コンテンツを備えた公開エリア地図
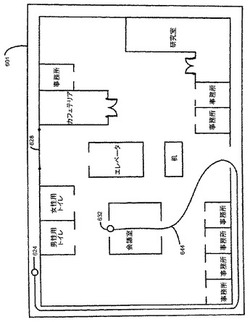
【課題】制約条件がある場合の目的地までの経路のルーティング及び案内を行う方法を提供する。
【解決手段】公開エリア地図及び関連するシステム及び方法が開示される。例えば、1つの方法は、人が歩き回る現実世界のエリアに対応するレイアウトの画像を受け取る段階を含む。画像内の通路に関連付けられた制約事項が生成される。画像を用いてポイントツーポイントルーティング用のルーティング可能地図を生成する。制約事項を通るか又はその周囲のルーティングは、制約事項を通過するための基準に適合しているかどうかに基づいている。
(もっと読む)
車両の視覚支援装置

【課題】車両の走行状態と道路情報を関連づけた情報として蓄積し、乗員が視認したい車両周辺の画像を選択して、表示する車両周辺の視覚支援装置を提供する。
【解決手段】前記車両の周辺を撮像する複数の撮像手段(10)と、道路を走行している前記車両の、少なくとも現在位置および時刻を含む走行状態(31)を検出する走行状態検出手段(30)と、少なくとも前記現在位置近傍を含み、前記車両の走行に関わる前記道路の情報が取得されたもしくは記憶された道路情報確認手段(20)と、前記撮像された画像を選択する画像選択手段(40)と、前記選択された画像を表示する表示手段(50)と、を備え、前記画像選択手段(40)は、前記車両が前記現在位置から前記道路情報確認手段(20)によって前記走行状態(31)の変化が予想される変化予想地点へ移動しようとするときに予想される前記走行状態(31)の変化に応じて画像を自動選択する構成とした。
(もっと読む)
測位装置
【課題】無駄な電力消費を減らすことができ、且つ、装置の使用中に移動速度が変化した場合でも、適宜な間隔でGPS測位処理を実行することのできる測位装置を提供する。
【解決手段】電源用のバッテリと、このバッテリにより駆動されw、GPS衛星からの測位用電波を受信して現在位置を測定する第1の測位手段とを備えた測位装置である。そして、当該測位装置における装置本体の移動速度を検出する移動速度検出手段(S1,S2)と、この移動速度検出手段により検出された移動速度が所定値以下か否かを判別する判別手段(S3)と、この判別手段により前記移動速度が所定値以下と判別された場合に、前記第1の測位手段を間欠的に駆動させる間欠駆動手段(S11〜S15)とを備えている。
(もっと読む)
運転アドバイス提供装置
【課題】運転者へのアドバイスの提供をより効果的に行う運転アドバイス提供装置を提供する。
【解決手段】運転アドバイス提供装置は、車両の運転状態に関する複数の診断項目について診断を行って、診断結果に基づくアドバイスを生成してその生成したアドバイスを提供するようになっている。複数の診断項目はそれぞれ、診断の方式に応じて分類されており、例えば、診断結果の良否を定量的に判断するよりも相対的に評価するのに適した診断項目に関しては、前回の評価区間(a〜fの区間)における診断結果Aと、今回の評価区間(g〜hの区間)における診断結果Bとを比較し、診断結果Bの良否を相対的に判断して、アドバイスを生成する。このように、診断項目の分類に応じた適切な方式・タイミングで、診断及びアドバイス生成がなされるため、アドバイスの提供効果が向上する。
(もっと読む)
車載用ナビゲーション装置
【課題】経路を逸脱した際に、その地点およびその時点で表示されていた地図の縮尺を記憶しておき、次の走行でその地点に接近した時により詳細な地図を表示する。
【解決手段】車載用ナビゲーション装置1は、案内経路を走行中に経路外れ判別手段により経路外れを検出すると、その地点とその時表示していた地図の縮尺を地点・地図縮尺記憶手段に記憶しておく。その後の経路案内において、現在位置検出手段が検出した現在位置が、地点・地図縮尺記憶手段に記憶された経路逸脱地点に対して所定の距離範囲になると、地図縮尺比較手段は、現在表示手段に表示されている地図の縮尺と、地点・地図縮尺記憶手段に記憶された地図の縮尺とを比較し、現在の地図の縮尺が前記記憶された地図の縮尺よりも詳細な地図の縮尺でない場合、表示手段に表示する地図の縮尺を、より詳細な地図の縮尺に変更する。
(もっと読む)
ナビゲーション装置、方法及びプログラム
【課題】GPSやマップマッチングの精度が悪くても、境界線通過の検出を、少ない計算量で正確に行う。
【解決手段】地図データを記憶する地図情報記憶部1と、境界線を記憶する境界線記憶部2を備える。GPSや車速センサなどのデータを取得する位置情報取得部4の情報に基づいて、移動体位置検出部4が移動体の現在位置を検出する。移動体の位置情報Mと、境界線上に設けた始点Pと終点Qから境界線ベクトルAと移動体位置ベクトルBを得る。これらベクトルA,Bの外積を外積演算部5で計算する。境界線通過検出部6は、2つのベクトルA,Bの外積の符号の変化により、移動体が境界線を越えたかどうかを検出する。境界線通過の検出結果は、報知制御部7が制御する通信機器9により移動体外部に、報知部10により移動体Mに報知する。報知情報記憶部8に記憶した、通過した境界線に関する報知情報も、報知する。
(もっと読む)
運転アドバイス提供装置、運転診断装置
【課題】車両の運転状態の良否を診断して診断結果に基づくアドバイスを提供する運転アドバイス提供装置において、診断の的確性を向上させる。
【解決手段】所定の走行区間毎にその走行区間における車両の運転状態を演算し、診断対象の走行区間(以下、対象走行区間と言う)について演算した運転状態と、対象走行区間の1つ前(前回)の走行区間について演算した運転状態とを比較して(S150,S170)、対象走行区間における運転状態の良否を診断する。運転状態の定量的な評価(絶対評価)が難しい場合でも、相対評価により適切に評価できる。
(もっと読む)
高度算出装置、高度算出方法、高度算出プログラムおよび記録媒体
【課題】センサの学習状態が誤っている場合、自動的にセンサの学習状態を初期化すること。
【解決手段】センサ部101によって移動体の高度、高度変化量もしくは傾斜を検知し、出力する。そして、学習部102によって、センサ部101の出力誤差を学習する。そして。センサ部101の出力値と、学習部102の学習状態に基づいて、高度算出部103によって移動体の高度を算出する。そして、所定地点に到着したと判断された場合、所定地点での高度を記録部104に記録する。つぎに、移動体が所定地点に再度到着した場合に、高度差算出部105によって、高度算出部103で算出された高度と記録部104に記録されている高度との高度差を算出する。そして、高度差が所定値以上と判断された場合、初期化部106によって、学習部102の学習状態を初期状態に戻す。
(もっと読む)
車載通信装置、及びナビゲーション装置
【課題】車車間通信情報による案かな安全運転支援サービスを実現する車載通信装置を提供する。また、本車載通信装置を導入後に、ナビゲーション装置を後から装着しても車載通信装置との接続を可能とした安全運転支援サービスを提供する。
【解決手段】自車両の車両走行情報を生成し周辺車両と送受信し、自車両の走行に注意警戒が必要な情報を受信した場合は、ドライバに通知する。またナビゲーション装置と接続するナビ接続手段を搭載し、ナビゲーション装置と接続している場合には、車両走行情報生成処理をナビゲーション装置で行うことにより、車載通信装置導入後にナビゲーション装置を搭載する場合にも対応することが可能となる。
(もっと読む)
ナビゲーション装置および車両の走行安全装置
【課題】道路の分岐点において適切なマップマッチングをおこない、適切に安全装置を作動させる。
【解決手段】ナビゲーション装置13は、現在位置検出部21から出力される位置信号に基づいて地図データ記憶部23の道路データのうち自車両が存在する走行路を判定するナビゲーション処理部22と、撮影装置16から出力される画像データに基づいて道路の走行区分線を認識する道路形状認識部65とを備え、ナビゲーション処理部22は、道路形状認識部65により認識された走行区分線に基づいて、自車両が分岐点を通過する前後において同一の道路を継続して走行しているか否かを判定し、同一の道路を継続して走行していると判定した場合に、自車両が存在する走行路を、この時点までに判定した走行路から分岐点に接続された他の走行路へと変更することを禁止する。
(もっと読む)
車両用撮影システム
【課題】カメラによる撮影映像を取得する際に、露出調整時の不明瞭な撮影影像をなくすことができる車両用撮影システムを提供する。
【解決手段】現在位置に合った露出に調整される第1のカメラと、前方位置に合った露出に調整される第2のカメラとを用意し、トンネルに入る前に、第2のカメラをトンネル内走行用の露出に調整しておき、トンネル内に入ったら、撮影映像の取得先を、第1のカメラから第2のカメラに切り替える。そして、トンネル内に入って所定時間後に、撮影映像の取得先を、第2のカメラから第1のカメラに切り替える。また、トンネルから出るときには、その前に、第2のカメラをトンネル外走行用の露出に調整しておき、トンネルから出たら、撮影映像の取得先を、第1のカメラから第2のカメラに切り替え、所定時間後に撮影映像の取得先を、第2のカメラから第1のカメラに切り替える。
(もっと読む)
車載装置
【課題】 脳波を用いてカーナビゲーション装置などの電子機器や、メカと組み合わせたロボットアーム、電動車椅子などを制御することのできる脳波信号を用いた制御装置及び制御方法を得る。
【解決手段】 脳波センシング開始手段、選択肢図形表示手段、脳波強度表示手段、脳波検出手段を少なくとも有する装置とする。自動車の場合、まずハンドルまたは車内に取り付けられた脳波センシング開始の押しボタンを押すと、選択肢を示す図形や文字が複数表示される。所定の方法で思考して選択する。選択肢は1階層最大6個の階層構造になっており、この操作を段階的に複数回行う。脳波検出電極は、ヘッドレスト(枕)や、天井から下げられる部品から近い位置に設ける。検出した脳波は、増幅や信号処理を行い、記憶し、制御信号を有線または無線送信する。
(もっと読む)
車両用ナビゲーションシステム及び車両用ナビゲーションシステムにおける位置情報の補正方法、並びに、情報配信サーバ及び車載ナビゲーション装置
【課題】車車間通信を利用して他車両を認識することができない状況であっても、自車両位置を精度よく補正することができる車両用ナビゲーションシステムを提供する。
【解決手段】車両用ナビゲーションシステムにおいて、情報配信センタ50は、路上目標物の位置に基づいて車両位置を補正してその補正に使用した情報を送信してきた任意の車両の付近に存在する他車両であって位置補正が完了していない他車両を特定すると共に、当該任意の車両から送信されてきた路上目標物の位置情報と、当該他車両から送信されてきた当該他車両の位置情報との位置関係に基づいて、当該他車両の位置情報を推定し、当該他車両の車両位置の補正に必要となる情報として当該他車両に対して送信する。そして、他車両に搭載されている車載ナビゲーション装置10は、情報配信センタ50から送信された情報に基づいて、車両位置を補正する。
(もっと読む)
路面滑り易さ判定システム
【課題】ABS装置等のスリップ防止機能の作動情報を適切に判定して、路面の滑り易さを的確に判定することが可能な路面滑り易さ判定システムを提供する。
【解決手段】路面滑り易さ判定システム1は、車両2が有するスリップ防止機能の作動情報等を検出する検出手段21と、スリップ防止機能の作動情報等に基づいてスリップ防止機能が作動された地点Pの路面の滑り易さを判定する路面状態判定手段3とを備え、路面状態判定手段3は、路面が滑り易いためにスリップ防止機能が作動された可能性が高い走行状態ほど高い値の基準点paを設定するための第1判定条件群に基づいて基準点paを定め、スリップが生じ難い車両状態に対応する車両情報ほど大きな値の重み付け係数w1〜w4を設定するための第2判定条件群に基づいて重み付け係数w1〜w4を選択し、それらに基づいてスリップ防止機能が作動された地点Pの路面の滑り易さをポイントpとして算出する。
(もっと読む)
渋滞予測装置、経路探索装置、渋滞予測方法、経路探索方法、渋滞予測プログラム、経路探索プログラム、およびコンピュータに読み取り可能な記録媒体
【課題】渋滞予測の高精度化を図ること。
【解決手段】渋滞予測装置110は、渋滞DB111と、入力部112と、第1渋滞予測部113と、第2渋滞予測部114とを備える。渋滞DB111は、過去の渋滞に関する過去渋滞情報を蓄積したものである。入力部112は、渋滞を発生させ得る要因に関する情報(要因情報)の入力を受け付ける。第1渋滞予測部113は、要因情報で示される要因に起因して発生する渋滞を予測する。第2渋滞予測部114は、渋滞DB111および第1渋滞予測部113の予測結果(第1渋滞予測結果)を用いて、渋滞を予測する。
(もっと読む)
情報表示方法、情報処理装置および情報表示用プログラム
【課題】位置表示対象の移動速度が大きいような場合でも、必要な情報を確実に読み取ることができるようにする。
【解決手段】時点t1までは、ユーザの移動速度が閾値速度Vth以下であり、地図スクロールモードとして、表示画面1上でユーザの移動速度に応じたスクロール速度で地図をスクロールし、カーソル9aを表示画面1の中心に表示する。時点t1でユーザの移動速度が閾値速度Vthより大きくなると、表示モードを地図スクロールモードから地図固定モードに変更する。ただし、時点t2でカーソル9aが表示画面1の端縁に接近すると、表示画面1上で地図を移動させ、カーソル9aを表示画面1の中心に引き戻す。
(もっと読む)
情報提供システム、および車載機
【課題】利用者が置かれている状況に適したコンテンツを適切に選別して提供可能な情報提供システムと、その情報提供システムを構成するのに適した車載機を提供すること。
【解決手段】車載機は、位置検出装置により検出された車両の現在位置データに基づき、コンテンツサーバに対してコンテンツデータの配信を要求する(S120)。そして、配信要求を受けたコンテンツサーバ側にてコンテンツデータのうち現在位置データに基づき収集されたものをコンテンツサーバから取得する(S130)。その後、取得したコンテンツデータのうち、利用人数要素84のデータに検出された乗車人数と一致する人数を示すデータが含まれており、且つ、利用可能天候要素のデータに検知された降雨状況と一致するものが含まれているものを抽出し(S170)、抽出したデータに基づいて、施設の情報を表示装置に出力する。
(もっと読む)
自車位置補正システム及びプログラム
【課題】低摩擦係数の道路等を走行する場合、車両の不安定な挙動か発生しても自車位置検出精度の向上を図る。
【解決手段】自車の移動距離を検出する距離センサ(2)と、自車の向きを検出する方位センサ(3)と、GPS信号を受信して自車の位置を検出するGPSセンサ(4)と、自車位置精度に影響を及ぼす状況の検知機構(5)と、距離センサ、方位センサ、GPSセンサの検出出力により算出された自車位置の補正を行う位置補正手段(1a)と、前記検知機構の検知結果に基づいて位置補正手段を制御する制御手段(1b)とを備え、前記制御手段は、前記検知機構により自車位置精度に影響を及ぼす状況を検知したとき、該状況を検知しないときよりも一定区間距離センサと方位センサの検出出力の重み付けを小さくして自車位置補正を行うように位置補正手段を制御する。
(もっと読む)
ナビゲーション装置、ナビゲーション方法、ナビゲーションプログラム、および記録媒体
【課題】山道にて不安な走行を強いることなく、ユーザが山道から脱出したいと思ったときに、早急に脱出させること。
【解決手段】ナビゲーション装置100は、判定部101と、入力部102と、探索部103と、表示部104とを備える。判定部101は、移動体が山道を走行しているか否かを判定する。入力部102は、移動体が山道を移動していると判定されている場合に、当該移動中の山道を脱出するか否かの入力をユーザから受け付ける。探索部103は、移動中の山道を脱出する旨の入力を受け付けた場合に、移動中の山道を脱出する脱出経路を探索する。表示部104は、脱出経路に関する情報を表示する。
(もっと読む)
周辺情報表示装置および周辺情報表示方法
【課題】 施設の位置を直感的に把握できる周辺情報表示装置を提供する。
【解決手段】 周辺情報表示装置1は、車両の現在位置を検出する現在位置検出部10と、施設に関するデータを記憶した施設データ記憶部12と、車両を運転中のドライバから見て左右2つの表示領域に画像を表示する画像表示部16と、施設データ記憶部12に記憶されたデータに基づいて車両の進行経路上にある施設を求める施設検出部14と、施設検出部14にて求めた施設のデータを、車両の進行方向に向かって道路の右側にある施設については右側の表示デバイス20に表示し、道路の左側にある施設については左側の表示デバイス18に表示する表示制御部22とを備える。
(もっと読む)
281 - 300 / 767
[ Back to top ]