
Fターム[2G024AB01]の内容
機械部品、その他の構造物又は装置の試験 (9,137) | 伝動、伝達装置 (275) | 歯車伝動装置 (166)
Fターム[2G024AB01]の下位に属するFターム
Fターム[2G024AB01]に分類される特許
21 - 40 / 71
シフトフィーリング評価装置
【課題】耐久性が向上するシフトフィーリング評価装置を提供する。
【解決手段】シフトレバー11のシフト操作に応じて摺動しセレクト操作に応じて回動するシフトロッド30と、ストローク部61と、ストロークセンサ本体62と、を備えるストロークセンサ60と、を具備し、前記ストローク部61は、前記シフトロッド30にシフト動作伝達板40を介して接続され、前記シフトロッド30の摺動に追従して摺動し、前記シフトロッド30の回動に追従して回動し、前記ストロークセンサ本体62は、前記シフトロッド30にセレクト動作伝達板50を介して接続され、前記シフトロッド30の回動に追従して回動し、前記シフト動作伝達板40は、下ブラケット42と、該下ブラケット42に対し支点43を中心として回動可能なストロ―ク支持部44と、を含み、前記セレクト動作伝達板50は、前記シフトロッド30を摺動自在に支持する。
(もっと読む)
動力系の試験装置及びその制御方法

【課題】応答遅れを抑制し、吸収側の動力部であるダイナモメータの速度を高精度に制御することができる、動力系の試験装置及びその制御方法を提供すること。
【解決手段】目標速度値V1が微分されて加速度値A2が得られ、加速度値A2に基づき目標トルク値T1が算出される。この目標トルク値T1が、吸収側トルク計6で検出された実トルク値T4に近づくようにPIアンプ52により制御される。目標速度値V1は予め設定された既知の情報であるので、目標速度値V1が微分された値である加速度値A2もほとんど遅延なく得ることができる値となる。したがって、フィードバック制御の応答遅れを抑制することができ、高精度にダイナモメータ2の速度を制御することができる。
(もっと読む)
振動測定及び回転機械の診断の機器及び方法
【課題】以前の測定履歴に基づかないで回転機械状態を診断するユーザ・インタフェース・システム及び方法を提供する。
【解決手段】振動データ収集及び回転機械障害診断機器は、機械設定エンジン110、測定エンジン120、診断エンジン150、測定ユーザ・インタフェース122、機械設定ユーザ・インタフェース112及び診断ユーザ・インタフェース152を含む。機械設定エンジンは、機械設定ユーザ・インタフェースを介して機械に関するパラメータを要求し受ける。測定エンジンは、測定ユーザ・インタフェースを介してセンサ配置場所を要求し受け、測定した場所と測定する必要が依然ある場所の追跡を維持する。診断エンジンは、機械障害を診断し、直感的図形重大度スケールを用いて診断ユーザ・インタフェースによりユーザに情報を示す。
(もっと読む)
パワートレインの試験システム
【課題】実タイヤで発生するトルク脈動を高い精度で模擬した試験ができる。
【解決手段】シミュレーション演算部10の演算回路12と13は、パワートレインの出力軸(タイヤ)で発生する脈動トルク成分を、車速(タイヤ回転数)別に周波数成分と振幅でマップ化しておき、このマップと車速から、実タイヤで発生する脈動トルク成分を模擬した脈動トルク成分を演算回路14で求め、この脈動トルク成分を脈動トルク成分付加回路15でダイナモメータのトルク指令値に加える。
(もっと読む)
製品の品質検査における良否判定方法
【課題】従来の良否判定方法では検出できなかった微小な現象として現れる不良を捉えて、より精度良く製品の良否を判定することができる製品の良否判定方法を提供する。
【解決手段】品質検査対象のA/Tアッシー11について、測定項目(1)〜(6)を測定し、測定項目ごとに測定値の良否を判定する複数の工程と、選択した二以上の測定項目(1)(2)(特性量A・B)について、良品群における特性量A・Bの組合せに係るマハラノビス平方距離(良品MD値)を算出して、良品MD値の正規分布に基づいて、特性量A・Bの組合せに係る判定閾値(良品MD値の正規分布における3σを示す楕円)を算出する工程と、検査対象のA/Tアッシー11に係る特性量A・Bの組合せに係る特性量たるMD値(検査対象MD値)を算出する工程と、特性量A・Bの組合せに係る特性量の判定閾値に基づいて、検査対象MD値の良否を判定する工程と、を備える。
(もっと読む)
磨耗状態検知システム
【課題】機械動作部を機械収容部から取り出し、若しくは潤滑油から露出させることなく、機械動作部の故障を未然に防止する磨耗状態検知システムを提供すること。
【解決手段】内部が潤滑油に含浸されたポッドに設けられ、潤滑油中で所定に動作をする少なくとも鉄分を含む機械動作部の磨耗状態を検知する磨耗状態検知システム3は、潤滑油に含まれる鉄分濃度を検知する検知ユニット40と、検知ユニット40により検知された鉄分濃度に基づき、機械動作部の磨耗状態を算出する磨耗状態算出手段50と、を備えることで、潤滑油に含浸されたポッドに設けられた機械動作部の磨耗状態が、機械動作部をポッドから取り出し、若しくは潤滑油から露出させることなく検知できるばかりか、機械動作部の不具合発生の原因となる機械動作部の磨耗状態を、不具合の発生以前に検知して不具合を未然に防止できる。
(もっと読む)
車速制御装置
【課題】指示速度と無段変速装置からの出力車速とを対応させるための走行テストを、狭小なコースで、かつ、テスト時間も短くて済むようにする。
【解決手段】指示速度L1,L2,L3に対応する基準の変速操作位置H1,H2,H3を設定する基準車速設定手段を、無段変速装置7の変速操作位置を指示速度L1,L2,L3近くの速度に相当する試験走行用の変速操作位置thに設定して車体を走行させ、その試験走行用の変速操作位置thにおける走行速度の検出結果から、指示速度L1,L2,L3に対応する変速操作位置を推定して、指示速度L1,L2,L3に対応する基準の変速操作位置H1,H2,H3として設定するように構成した。
(もっと読む)
車両用変速機のシフト操作検査装置
【課題】車両用自動変速機の組立ラインにおいて、完成品の検査としてシフト動作の操作力および操作量である操作角度の良否判定を、同時に且つ自動で計測可能な車両用変速機のシフト操作検査装置を提供すること。
【解決手段】自動変速機21に装着されたコントロールレバー23に対して、係合および離脱可能な検査ユニット13と、該検査ユニットを回転せしめる回転アクチュエータ15と、該回転アクチュエータおよび検査ユニットを昇降支持する検査基台3とを備え、検査ユニット13にエンコーダ59とロードセル57とが取り付けられるとともに、検査ユニット13は、回転アクチュエータ15によって回転駆動される揺動アーム部材45、所定の遊び角度を有して揺動アーム部材45と同軸的に回転するガイド部材53を有し、ガイド部材53を介してコントロールレバー23を回転させて操作力および操作量を計測する。
(もっと読む)
歯車の打痕検知装置及び歯車の打痕検知方法
【課題】打痕付きの歯車を特定できる歯車の打痕検知装置等を提供する。
【解決手段】歯車31が取り付けられた回転軸21と、歯車31と噛み合って歯車対Aを構成する他の歯車33が取り付けられた他の回転軸22と、を備えた装置20において、歯車の打痕の有無を検知する歯車の打痕検知装置10である。回転軸21を回転させたときの装置20の振動を検出し、振動信号を出力する振動検出手段(ステップS1)と、振動信号から歯車対Aの固有振動数に対応する周波数帯域の信号を抽出するフィルタ処理手段(ステップS3)と、抽出された信号にエンベロープ処理を施すエンベロープ処理手段(ステップS4)と、エンベロープ処理が施された信号から各回転軸21、22に対応する信号を分離する信号分離手段(ステップS5)と、分離された信号に基づき歯車対Aを構成する歯車31、33から打痕付きの歯車を検知する打痕検知手段(ステップS6)とを有する。
(もっと読む)
ギアボックス健全性モニタリングのためのシステムおよび方法
システムは、ギアボックスの1つまたは複数の特性を測定するように構成された複数のセンサ(322〜324)を含む。このシステムはギアボックス状態指標デバイス(300)をさらに含み、それは、ギアボックスの少なくとも1つの段に関連する入力信号をセンサから受け取るように構成された複数のセンサインタフェース(320)を含む。ギアボックス状態指標デバイスは、入力信号を使用してギアボックスの障害を識別するように構成されたプロセッサ(330)と、障害を識別する指標を与えるように構成された出力インタフェース(370)とをさらに含む。プロセッサは、ギアボックスの少なくとも1つの故障モードに関連する一群の周波数(640)を決定し、一群の周波数を使用して入力信号を分解し、分解入力信号を使用してギア信号を復元し、復元ギア信号をベースライン信号(328)と比較することによって障害を識別するように構成される。一群の周波数は噛み合い周波数およびその高調波を含む。 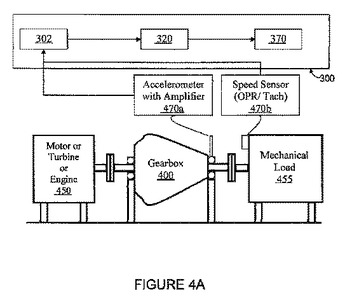 (もっと読む)
(もっと読む)
動力系の試験装置及びその制御方法
【課題】ダイナモメータのトルク制御を高精度に行うことができる、動力系の試験装置及びその制御方法を提供すること。
【解決手段】エンジン11及びトランスミッション12からなる供試体1を試験する試験装置100は、ダイナモメータ2、インバータ3、トルク計6、角度(または角速度)の検出器9、制御器20、走行抵抗トルク値生成部5、電気慣性演算部15及び補正演算部4を備える。補正演算部4は、トルク計6により検出された実トルク値と、「加速トルク値+走行抵抗トルク値」との偏差を得、この偏差がゼロとなるように、比例演算及び積分演算により得られた値を、加算器41により抵抗トルク値Trに加えることで、トルク指令値Tcを生成する。このように、補正演算部4は、トルク計6により検出された実トルク値に基づき抵抗トルク値Trを補正してトルク指令値を得ることで、ダイナモメータを高精度に制御することができる。
(もっと読む)
被試験体の試験装置
【課題】加減速の時でも正確な試験ができる被試験体の試験装置を提供する。
【解決手段】被試験体1に負荷を与えるための負荷装置2と、負荷装置2の出力側に連結されるフライホイール8とを備え、負荷装置2からの負荷をフライホイールを介して被試験体1に与えることにより試験を行う被試験体の試験装置であって、フライホイール8の負荷装置側となる入力側に、負荷装置2の出力トルクを検出する第1トルク計7を配置し、フライホイール8の出力側に、被試験体の出力トルクを検出する第2トルク計6を配置した。
(もっと読む)
変速機の試験装置
【課題】変速機の試験時、及び試験終了時に取り付けられる水冷カバー、オイルパンは、外形は比較的大きく、且つ相当の重量となって取り付け、取り外しが困難となっている。
【解決手段】試験機に取り付けられる変速機の下部位置にジャッキを配設する。
このジャッキの可動ロッド線上に下部水冷カバーを可動自在に連接し手変速機の下部位置に移動させ、所定位置となったとき上部水冷カバーを取り付ける。
また、試験後の変速機からの油抜きも、常時固定側に収納されたオイルパンを変速機の下部に移動させて固定することで可能となり、油の付着したオイルパンの取り付け、取外しも短時間で簡単に可能となるものである。
(もっと読む)
制御装置、画像形成装置、摩耗検出方法、プログラム、記憶媒体
【課題】モータの回転を伝達するギヤの摩耗をより早期に検出することができる制御装置等を提供すること。
【解決手段】被回転体14の回転速度を制御する制御装置200において、モータと一体に回転するギヤ43Aと、ギヤ43Bとが噛合して、モータ41の回転を被回転体14に伝達する伝達手段43と、被回転体14の回転速度を時間に対応づけて検出する速度検出手段46、72と、回転速度に基づきモータ41を一定速度に制御するモータ制御手段57,58と、時間に対応づけて検出した回転速度を、周波数と回転速度の変動の大きさを示す変動値の関係に変換する変換手段73と、ギア43Aの歯数とモータ41のモータ回転速度に基づき決定された特定周波数における変動値が閾値を超えている場合に、ギア43Aの歯又はギア43Bの歯の少なくとも一方の摩耗の予兆を検出する摩耗検出手段74と、を有することを特徴とする。
(もっと読む)
負荷計測装置
【課題】既存の構造物に構造の変更なしに後付で組み込みが簡単にでき、外部ノイズの影響を受けにくく、電圧降下による損失が発生しない負荷計測装置を提供する。
【解決手段】構造物Cに固定された少なくとも1つのメディア110とメディア110に記録された情報を読み取る少なくとも1つのレーザピックアップ130とレーザピックアップ130の出力を記憶演算する演算回路とを有し、メディア110がレーザピックアップ130で読み取り可能な凹凸形状のピット120を定間隔で配列することからなる位置データを記録し、レーザピックアップ130が位置データの初期値と計測時における現在値とを読み取り、演算回路が現在値と初期値との差に所定の定数を乗ずることにより構造物の負荷を求めることによって前記の課題を解決する。
(もっと読む)
歯車形軸継手の使用限界判定方法
【課題】歯車形軸継手を稼動中に開放することなく、内部の歯車の摩耗量を検知し、歯車形軸継手の使用限界の判定を行う
【解決手段】 内歯車5を有する外筒6と、外歯車4を有する内筒3とを備える歯車形軸継手に外筒6に連動して回転する第1反射体11、および、内筒3に連動して回転する第2反射体10を設置し、駆動側軸1bの回転数と同調して発光させた光を第1反射体11および第2反射体10に照射し、反射光から把握される第1反射体11および第2反射体10の相対的な位置関係により歯車の摩耗量を検知し、歯車形軸継手の使用限界を判定する。
(もっと読む)
接触疲労損傷を発生したときに起こる経時変化を検出する検出方法
【課題】自動車の動力伝達などに関わる接触部位を有する部品に接触疲労損傷が発生する瞬間に部品に対して起こる変化点、すなわち変化を表わす信号を検出するには時間がかかるので、あらかじめ損傷を発生させた部品と損傷のない部品との出力する信号を比較したデータを接触疲労損傷が起こったことを示す指標として用いている。
【解決手段】部品に水素をチャージした上で、実際の部品の使用条件と類似の条件で転動接触疲労試験を行ない、部品から出る信号の経時変化を検出する。このことにより、部品に水素をチャージしない場合よりも短時間で効率よく、接触疲労損傷が発生する瞬間に部品に対して起こる変化点、すなわち変化を表わす信号を高精度に検出することができる。
(もっと読む)
運転パターン設定装置
【課題】車両用自動運転システムにおいて計測対象となる複数の対象変速を順に行わせたときの所要時間が可及的に短くなる最適運転パターンを迅速に作成する。
【解決手段】受付手段152により対象変速が受け付けられ、プロット手段154により変速線上における対象変速の位置が決められ、変速間所要時間算出手段158により変速線上の対象変速の位置に基づいて変速マップにおける対象変速間の車速V方向の距離が何れをも取得され、その距離に基づいて対象変速を順に行わせたときの対象変速間における所要時間が算出され、合計時間算出手段160により対象変速を何れも含む対象変速の順列で設定された運転パターンDP毎に所要時間を加算した合計所要時間が算出され、運転パターン選択手段162により合計所要時間が最短となる運転パターンDPが最適運転パターンDPBとして選択されるので、最適運転パターンDPBが適切且つ迅速に作成される。
(もっと読む)
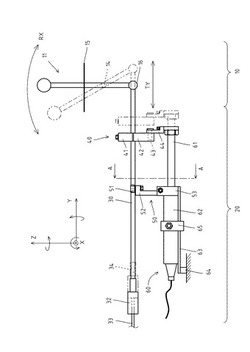
シフトフィーリング評価装置
【課題】容易な作業手順でマニュアルトランスミッションのシフトフィーリングを定量評価することができるシフトフィーリング評価装置を提供する。
【解決手段】シフトフィーリング評価装置10は、所定方向に移動可能なシフトレバー100と、シフトレバー100に接続され、シフトレバー100の移動に応じて摺動する第一シフトロッド200と、検査対象たるマニュアルトランスミッションに着脱可能に係合する第二シフトロッド400と、第一シフトロッド200と第二シフトロッド400とを接続するシフトケーブル500と、第一シフトロッド200の摺動量を検出するストロークセンサ700と、第二シフトロッド400に設けられ、第二シフトロッド400に作用する荷重を検出するロードセル800と、を具備する。
(もっと読む)
パワートレインの試験システム
【課題】実エンジンが発生するトルク脈動のシミュレーションを容易にしてその精度、特に加振シミュレーション精度を高める。
【解決手段】エンジントルクのシミュレーション演算部10のうち、実エンジンが発生するトルク脈動を、トルク脈動周波数演算回路14で演算する模擬エンジンの気筒数と回転数によって決まる周波数と、トルク脈動振幅演算回路15で演算するエンジン回転数別にしたトルク振幅値マップまたは振幅比率マップから求める振幅または振幅比率で正弦波を模擬し、このトルク脈動をトルク指令に重畳させ、これをインバータ20のトルク指令として模擬モータ(ダイナモメータ)30を駆動する。模擬エンジンのスロットル開度とエンジン回転数と脈動振幅値をパラメータとするトルク振幅値三次元マップ又はトルク振幅比率三次元マップからトルク脈動の振幅を求めてシミュレーション試験を行う。
(もっと読む)
21 - 40 / 71
[ Back to top ]