
Fターム[3E054AA02]の内容
包装位置への供給−物品の供給 (7,769) | 包装対象物 (760) | 板状物品 (41)
Fターム[3E054AA02]の下位に属するFターム
硬貨 (2)
Fターム[3E054AA02]に分類される特許
1 - 20 / 39
供給装置
【課題】送り出す物品の分量を変更できる供給装置を提供する。
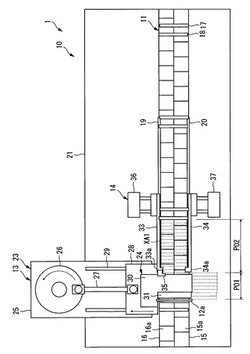
【解決手段】供給装置10は、バケットコンベア11、送出しユニット13、および保持ユニット14を備え、上流に送り込まれた複数枚の食パンXA1を所定枚数に分割して供給位置PO1から送り出す。バケットコンベア11は、搬送面15a,16aを有する走行プレート15,16と、食パンXA1を支持する先行支持部材17および後続支持部材18と、を備える。搬送面15a,16aは、間欠的に走行することで、食パンXA1を所定枚数毎に順次供給位置PO1に位置させる。送出しユニット13は、供給位置PO1に位置する所定枚数の食パンXA1を、搬送面15a,16aの停止中に、幅方向に押送する。保持ユニット14は、供給位置PO1の上流側に隣接する待機位置PO2で待機する食パンXA1を、送出しユニット13が食パンXA1を送り出すことに先立って保持する。
(もっと読む)
物品搬送装置

【課題】簡略化した構造のロボットハンドを使用しても、容器に物品を刺身重ね状に綺麗に載置することが可能な物品搬送装置を提供する。
【解決手段】容器搬送コンベヤ4は、幅方向Yで水平面に対し傾斜した載置面16aに容器3を載置して搬送する第一搬送部15と、第一搬送部15で物品1が載置された容器3を受渡部18に搬送する際に容器3を傾斜状態から略水平状態に変換する第一姿勢変換部17と、受渡部18,22で容器3を略水平状態から第一搬送部15とは逆向きに傾斜させる第二姿勢変換部23と、容器3を略水平状態に戻して搬送する搬送ベルト21とを備えている。ロボットは、載置面16aに傾斜姿勢で載置された容器3に複数の物品1を載置する際に、第一搬送部15で水平面に対し物品1のなす角度を、搬送ベルト21にて略水平姿勢にある容器3内で各物品1が水平面に対しなす角度より小さくして、各物品1を刺身重ね状に容器3に載置する。
(もっと読む)
スライス食パンの袋詰め方法および装置
【課題】スライス食パンを良好に搬送する。
【解決手段】スライス食パンPは、スライス面が上下に重なる横姿勢またはスライス面が左右に重なり食パンの耳部が底面となる縦姿勢で、オープナーで開口された袋に至るまでの搬送路10において押送部材によって押送される。スライス食パンPを横姿勢で押送する際には、食パンPの底面が面する路面を複数の線状路面24aとし、スライス食パンPを縦姿勢で押送する際には、スライス食パンPの底面が面する路面を線状路面24aより広く面する面状路面24bとするよう、異なる路面に切り替える。
(もっと読む)
集積供給システム
【課題】物品の形状や包装態様に関係なく、包装機に物品を供給できる集積供給システムを提供する。
【解決手段】集積供給システム12は、複数の物品XA1を外包機11に向けて搬送するベルトコンベア14と、ベルトコンベア14と協働するアームコンベア15と、物品XA1を外包機11に向けてガイドするガイドユニット16と、等を備えている。ガイドユニット16は、ベルトコンベア14のベルト33上に通路を形成する一対の外側ガイド部材46,47と、外側ガイド部材46,47に形成される通路を仕切って複数の小通路に分割する中間ガイド部材48〜52と、等を備えている。外側ガイド部材46,47は、外包機11に向かうに連れて互いの間隔が狭小となるようにベルトコンベア14の筐体45に取り付けられる。アームコンベア15は、ベルトコンベア14と共に、ベルト33に置かれた物品XA1を搬送するアーム57等を備えている。
(もっと読む)
物品分離装置
【課題】物品を連続して搬送しながら、物品を傷めることなく、後続の物品から分離させる物品分離装置を提供する。
【解決手段】物品を列をなした状態で搬送する搬送コンベヤ手段10と、先頭の物品に当接係合する係合部材51と、係合部材を移動させる係合部材駆動手段50と、隣接する物品同士間に進入そして脱出する分離部材31と、分離部材を移動させる分離部材駆動手段30を備え、係合部材駆動手段50が係合部材を先頭の物品P1の前面に当接した状態で前進せしめ、かかる状態で分離部材駆動手段30が分離部材を物品間に入り込ませて物品の搬送速度より遅い速度で前進移動させると共に、係合部材駆動手段50は、係合部材を先頭の物品P1の前面への当接を解除した後に、分離部材31が入り込んでいる物品P1,P2間に進入せしめ、分離部材31の移動速度より速い速度で係合部材を前進させて物品P1を前方へ押し出し、後続の物品P2から分離させる。
(もっと読む)
包装装置
【課題】粒状物が2本の原反間の所期の位置に挟み込まれるようにして包装することができるようにした包装装置を提供する。
【解決手段】粒状物を挟み込むための凹部11aが少なくとも一方のローラ11,12の外周面に設けられ、重なり合いつつある2本の原反1,2間に粒状物を案内するシュートパイプ20が一対のローラ11,12の上流側に配備されている。ローラ11,12に設けられた凹部11aを目掛けてシュートパイプ20から粒状物を噴出させる。粒状物を1個ずつ入れる窪み部61,61,…を外周面に複数設けた排出側の回転ドラム(第2のドラム)60がシュートパイプ20の上流端に配備されている。窪み部61,61,…に空気を噴射することにより、粒状物が窪み部61,61,…内からシュートパイプ20内に一定の間隔を空けて噴出する噴射手段64が備えられている。
(もっと読む)
複数の食製品の半重ね方法及び装置
【課題】扁平状な食製品を半重ねする方法及び装置を提供する。
【解決手段】食製品5を搬送する搬送コンベア7の搬送方向に長い一対の製品受け部材23を開閉自在に備えた製品受け装置19における前記一対の製品受け部材23を、前記搬送コンベア7における搬送方向の上流側へ相対的に移動し一対の製品受け部材23を閉動作して、当該一対の製品受け部材23の長手方向の受け入れ位置に、食製品5を受け入れて保持する。次に、前記一対の製品受け部材23の長手方向の前記受け入れ位置よりも上流側の所定位置に対応する下方位置に、前記次の食製品5が達したときに、前記一対の製品受け部材23を開動作して、保持していた食製品5を前記次の食製品5に重ねる。そして、前記次の食製品5が前記受け入れ位置に対応したときに、前記一対の製品受け部材23を閉動作して重ねた状態の食製品5を受け入れて保持することを、複数回繰り返す。
(もっと読む)
食品整列供給システム
【課題】簡単な構造で、食品を搬送しつつその厚さ方向を横に向けて縦横に複数列をなすように整列した食品群として包装装置に供給することのできる食品整列供給システムを提供する。
【解決手段】伏姿勢で載置される多数の食品Fを複数の列に整列して供給搬送する整列搬送装置2と、送り出されてくる各列の食品Fを単列ずつに区分するとともに、搬送しつつ起立姿勢にして送り出す姿勢変更搬送装置3と、送り出されてくる各列の食品Fを列を保持した状態で中間搬送するとともに搬送方向後端で各列の間隔が狭くなるように寄せる中間搬送装置4と、送り出されてくる各列の起立姿勢の食品Fを各列について1個ずつの横方向に並んだ食品群FGとして送り出すグループ形成装置5と、グループ形成装置5から送り出されてくる食品群FGを排出搬送する排出搬送装置6と、制御部7とを設ける。
(もっと読む)
包装機における物品供給装置
【課題】ロボットを用いて物品を高速で搬送する包装機における物品供給装置を提供する。
【解決手段】定速回転する回転体12に所定の角度間隔で支持されるアーム20を有していて、回転体12が回転中において前記アーム20を回動させて、物品を吸着した吸着具25を、前記支持位置より前記回転体12の中心に近づけてから、該吸着具25を第2コンベヤ2の搬送方向に向けて移動させて物品を載置した後、該物品を載置したときの前記回転体の中心と支持位置16とを結ぶ線分に対するアームの角度より大きく広がるようにアーム20を回動させて、前記物品保持領域物品の物品を吸着する。
(もっと読む)
板状部材のラベル貼付システム
【課題】 できるだけ板状部材の搬送スペースが小さくなるように、板状部材の送り出し、板状部材へのラベル貼付及びラベル貼付された板状部材の受け入れを一連に行うことができるようにする。
【解決手段】 複数の板状部材Wを起立させ且つその一方面Waが水平一方向Haを向いて重畳するように列設させて保持し、起立させた状態で水平一方向Haの最前位の板状部材Wから該水平一方向Haに直交する水平直交一方向Vaに順次送り出す送り出し装置SFと、送り出された板状部材Wを起立させた状態で搬送するとともに板状部材Wの一方面WaにラベルLを貼付するラベル貼付装置SPと、ラベルLが貼付された板状部材Wを起立させた状態で順次受け入れるとともに、受け入れた複数の板状部材Wを起立させ且つその一方面Waが水平一方向Haを向いて重畳するように列設させて保持する受け入れ装置SRとを備えた。
(もっと読む)
箱詰め装置
【課題】商品の包装や収納をする包装箱などを収納箱などに簡易に箱詰めすることができる箱詰め装置を提供する。
【解決手段】厚紙などよりなる平板状の被搬送物11を搬送するコンベヤー12と、被搬送物を収納する段ボールなどの収納箱13を載置する載置台14とを有している。コンベヤー12の終端には、斜めに傾斜した傾斜部材15が形成されている。載置台14は、略水平方向において、被搬送物11がコンベヤー12により搬送されてくる方向(X1方向)およびその逆方向(X2方向)、並びにその直交方向に移動可能とされている。また、載置台14は、略垂直方向(Z1およびZ2方向)にも移動可能とされている。
(もっと読む)
ケース及び他の種類の積み重ね可能な複数の製品を寄せ集めるための方法及び設備
【課題】ボックス内に梱包するため、製品を積み上げる方法及び設備の提供。
【解決手段】薄手の直方体状製品をグループ分け・積み上げするため、第1の送り出しコンベヤ2で製品を貯留、送り出し、高速の供給コンベア3で製品間の間隔をあけ、供給コンベア3を跨いで昇降および水平移動可能な多段櫛型の収集器4によって、供給コンベヤ3上の製品を掬い取りつつ収集器4のコア5に順次積重ねて、規定数を掬い取った後、収集器4の後退移動によって積み重なった製品群を一括して収集器4から押出して後工程の箱詰め用取りまとめ装置10へ受け渡す。
(もっと読む)
包装された食品スライスを積層させる方法及びデバイス
【課題】技術的に簡素な手段及び対応デバイスにより実現される方法であり、異なる種類の複数枚のスライスのパックを大量に且つ高速で製造し得るという方法を提供する。
【解決手段】特に個別的に包装された複数枚のプロセス・チーズ・スライスなどの、複数枚のスライスの形態で提供される食品の完全パックを製造する方法において、完全パックは、複数枚のスライスの2個の均一な製品積層体から一体化され、夫々の場合において搬送手段により所定搬送速度にて、第1の製品積層体は第1の送給区画を介して搬送され且つ第2の製品積層体は第2の送給区画を介して搬送され、送給区画は収集領域において重畳して平行に延在し、且つ、上側送給区画は収集領域を画成する滑落端面にて終端し、同期のための手段は、滑落端面を介して到着した製品積層体が、下側送給区画に対して搬送された製品積層体上へと整然と載置される如く調節される。
(もっと読む)
ワーク整列集積装置
【課題】一つずつ移送されるワークを受け入れ一定個数毎に集積して取り出す、ワークの集積整列装置を提供する。
【解決手段】ワークの集積整列装置は、ワーク収容空間11を複数有するラック10と、ワーク収容空間11にワークWを収容する毎にラック10を一定ピッチで間欠送りするラック移動手段20と、ラック10に集積すべき数のワークWを収容した時点で、これらのワークWに水平バー31を通した状態になり、水平バー31を持ち上げてワークWを取り出すワーク取出手段30と、を備える。
(もっと読む)
梱包方法および梱包装置
【課題】基板を正確かつ迅速に高密度で梱包することができる梱包方法を提供する。
【解決手段】梱包方法は、基板50に吸着可能な吸着部25を有し基板を吸着保持可能な搬送装置20を用い、鉛直方向に沿って延びる収納領域65へ、基板を収納する方法である。梱包方法は、基板の少なくとも一側領域に吸着部を吸着させ、基板を吸着保持する工程と、基板の反りを評価する工程と、鉛直方向に沿った上面視において基板が収納領域内へ位置するように、収納領域の上方へ基板を位置決めする工程と、基板を前記収納領域へ搬送する工程と、を備える。基板の反りは、一側領域の吸着部によって吸着された部分が鉛直方向に沿うようにして基板が保持されている状態で、評価される。
(もっと読む)
物品供給装置
【課題】脆い性状の物品の切り出しを不良品を発生させることなく行ない得ると共に、個々の厚みに誤差がある物品の切り出しを確実に行なって供給する。
【解決手段】物品Wを積み重ねて収容するマガジン10の下方に、切り出しコンベヤ12が走行自在に配設される。切り出しコンベヤ12に、物品Wを所定個数単位で切り出す切り出し手段16が配設される。切り出し手段16は、物品搬送方向の後方に向けて下降傾斜する物品載置面30aを形成した複数の支持部材20,22,24,26と、水平な物品載置面34aを形成した支持部材28とを備える。各支持部材22,24,26,28の前端に、最下位の物品Wの後部を引掛けて押し出す押出部32,36が形成される。そして、切り出し手段16がマガジン10の下方を通過することで、物品Wが1個ずつ切り出されて下流側に搬送される。
(もっと読む)
包装容器に製品を挿入するピッキングライン並びに方法
本発明は、包装容器に製品を挿入するピッキングラインであって、搬送方向(x)における製品(14)の供給及び搬送のためのコンベヤベルト(12)と、コンベヤベルト(12)における製品(14)のポジションを特定するためのポジション画像処理系(20)を備えた少なくとも1つのピッカ(18)とが設けられている形式のものに関する。このような形式のピッキングラインにおいて本発明の構成では、搬送方向(x)で見て少なくとも1つのピッカ(18)の上流側に、品質画像処理系(16)が配置されていて、該品質画像処理系(16)は、コンベヤベルト(12)上を搬送方向(x)において品質画像処理系(16)のところを通過する製品(14)を、所定の品質特徴に関して検査するために働き、かつ搬送方向(x)で見て品質画像処理系(16)の下流側に続くピッカ(18)に伝えられる、製品(14)の把持又は非把持のための制御命令として役立つ品質情報と、製品(14)との対応付けのために働く品質画像処理系(16)である。 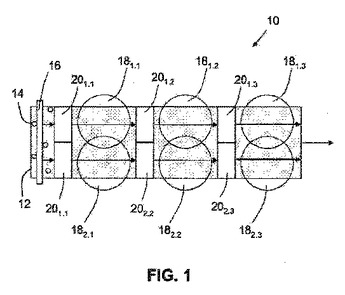 (もっと読む)
(もっと読む)
段ボ−ルシ−トの自動回転、横出し装置
【課題】 搬送と横出しコンベアを別個の電動ローラとし、さらに横出しロール全体の昇降装置まで必要とするため構造が複雑で、昇降および回転装置を設けた枠装置3の下の限られたスペースで交錯しているので、できるだけシンプルな構造にしたい。
【解決手段】 従来のように昇降および回転装置を設けた枠装置3の下に、搬送と横出しを共通の1式の電動ローラ2で行なうべく90度回転させて使い分ける回転装置5を設ける。
(もっと読む)
板状電子部品の整列方法とそれに用いる整列装置
【課題】厚みの薄い電子部品であっても、割れや破損を生じることなく、確実に位置決めして整列することができる整列方法とそれに用いる整列装置を提供する。
【解決手段】板状電子部品9の整列方法であって、前記板状電子部品9の一面を吸引保持して懸架する第一の工程と、前記板状電子部品9の一辺を、その側面から押圧することでこの板状電子部品9を移動させて位置決め、整列させる第二の工程とからなり、前記第二の工程は、板状電子部品9の対向する二辺を順次押圧して移動させることで、第一の方向の位置決めを行った後、前記二辺に直交する他の二辺を順次押圧して移動させることで、前記第一の方向に直交する第二の方向の位置決めを行うものである。
(もっと読む)
錠剤搬送装置
【課題】錠剤詰まりが生じない錠剤搬送装置の提供。
【解決手段】略V字状の搬送用溝を有するトラフに、錠剤の同時通過数を2個以下に制限する略三角形状の切欠部を有する錠剤通過制御板又は/及び錠剤を搬送方向に向って縦長扁平状態に起立させると共に、1個ずつ通過せしめる接触突片を有する錠剤起立制御板を横架配設した。
(もっと読む)
1 - 20 / 39
[ Back to top ]