
Fターム[3E054GB01]の内容
包装位置への供給−物品の供給 (7,769) | 検知、制御(検知情報) (301) | 存在、非存在 (73)
Fターム[3E054GB01]に分類される特許
1 - 20 / 73
物品整列装置
【課題】異なる形状の端部を有する物品を効率よく箱詰めすることを可能にする物品整列装置。
【解決手段】袋P2は、傾斜搬送部11cから停止中の第2の搬送装置12に落下する。袋P2の落下が、落下検知センサによって検知されると、第2の駆動部は制御される(第1の処理)。第2の駆動部は、袋P2が第2の搬送装置12のベルトコンベアに落下した後、第2の搬送装置12を駆動させる。このとき、袋P2は、上端を下流側に倒す。袋P2は、上端が下流側、下端が上流側に位置するように倒れる。これにより、袋P2は、第2の搬送装置12によって第2の平面状態で搬送される。第2の駆動部のモータの回転数が所定値に達すると、袋P2は、第3の搬送装置13に受け渡される。
(もっと読む)
物品搬送装置

【課題】簡略化した構造のロボットハンドを使用しても、容器に物品を刺身重ね状に綺麗に載置することが可能な物品搬送装置を提供する。
【解決手段】容器搬送コンベヤ4は、幅方向Yで水平面に対し傾斜した載置面16aに容器3を載置して搬送する第一搬送部15と、第一搬送部15で物品1が載置された容器3を受渡部18に搬送する際に容器3を傾斜状態から略水平状態に変換する第一姿勢変換部17と、受渡部18,22で容器3を略水平状態から第一搬送部15とは逆向きに傾斜させる第二姿勢変換部23と、容器3を略水平状態に戻して搬送する搬送ベルト21とを備えている。ロボットは、載置面16aに傾斜姿勢で載置された容器3に複数の物品1を載置する際に、第一搬送部15で水平面に対し物品1のなす角度を、搬送ベルト21にて略水平姿勢にある容器3内で各物品1が水平面に対しなす角度より小さくして、各物品1を刺身重ね状に容器3に載置する。
(もっと読む)
円柱体の回転位置決め装置
【課題】横倒させた円柱体Wを移動及び回転させながら、円柱体Wの回転位置決めを行うに際して、摩耗粉の発生を防止し、摩耗粉を原因としていた各種不具合を防止する。
【解決手段】レール部材3上の円柱体Wに当接する回転ローラ20と、回転ローラ20を回転駆動するローラ回転機構21と、回転ローラ20をレール部材3上の円柱体Wに接離させるローラ接離機構22と、回転ローラ20を送り爪5に同調させつつレール部材3に沿って移動させるローラ移動機構23とを有し、ローラ移動機構23には、回転ローラ20が円柱体Wに当接するよりも先に円柱体Wの一端部に当接して円柱体Wを送り爪5よりも搬送方向の下流側へ離反させる先行送り爪53が設けられており、この先行送り爪53には、回転ローラ20で回転される円柱体Wから転動力を受けて従動回転するロータ54が設けられている。
(もっと読む)
丁合い封書作製装置
【課題】封書を簡単に製造できる丁合い封書作製装置を提供する。
【解決手段】縦方向搬送部30は、下表紙3の左側縁部3Lに、接着材3aを縦方向Yに沿って塗布する下表紙−封入物接着材塗布部34と、接着材3aによって、下表紙3及び封入物4を接着して積層体5を作製する下表紙−封入物積層部35と、積層体5の下表紙3の右側縁部3Rに、接着材3bを縦方向Yに沿って塗布する第1下表紙−上表紙接着材塗布部37と、積層体5の封入物4の左側縁部4Lに、接着材4bを縦方向Yに沿って塗布する封入物−上表紙接着材塗布部38とを備え、左右方向搬送部40は、積層体5の下表紙3の縦方向Yの上下縁部3D,3Uに、接着材3cを左右方向Xに沿って塗布する第2下表紙−上表紙接着材塗布部43と、接着材3a,4b,3c,3dによって、上表紙2及び積層体5を接着して封書1を作製する積層体−上表紙積層部44とを備える。
(もっと読む)
横型製袋充填包装機
【課題】簡易な構成でコストを増やすことなく、機械運転中に、供給コンベヤのプッシャアタッチメントのプッシャ部を監視し、脱落や取付けの誤りを確実に検出し、包装不良の発生を未然に防ぐ機能を備えた横型製袋充填包装機の提供。
【解決手段】プッシャアタッチメント9のプッシャ部11を探知できる位置に配設され、従来は調整運転時以外には使用されていなかった供給原点センサ13を用いて、機械運転中に供給コンベヤ7のプッシャアタッチメント9のプッシャ部11を監視し、脱落や取付けの誤りを確実に検出し、包装不良の発生を未然に防ぐ。
(もっと読む)
カートニングマシン及び被収容物入りカートンの製造方法
【課題】被収容物が収容されていないカートンが流通してしまうことを阻止する。
【解決手段】カートニングマシンは、カートンCを搬送するカートンコンベア31と、カートンコンベア31に沿って被収容物Rを搬送する被収容物コンベア21と、被収容物RをカートンCに挿入する挿入装置41と、被収容物RのカートンCへの挿入完了地点EPよりも上流側に設けられてカートンC及び被収容物Rの検知を同時に行う相互検査センサ51と、仮想直交線VSLから挿入完了地点EPまでのカートンCの有無を検知するエリアセンサ55と、一旦停止した後はエリアセンサ55でカートンCが無いことが検知されるまではカートンコンベア31及び被収容物コンベア21の再起動を許可しない制御をする制御装置とを備える。而して、カートンCに対応する被収容物Rが被収容物コンベア21に存在しない状態でラインが稼働することを確実に回避できる。
(もっと読む)
物品供給装置
【課題】幅の広い平面(第1の面)を上下にして搬送されてきた物品を、90度回転させて立てた状態で箱詰めするために供給する装置を提供する。
【解決手段】供給コンベヤ4によって、幅の広い面を上下にしてランダムな状態で搬送されてきた物品2を、ロボット10で方向を揃えて取り出し載置プレートに載せる。載置プレートを90度回転させて物品2を幅の狭い面(第2の面)が上下に来るように立ち上げ、各載置プレートの間隔を縮小して物品2を集積した後、製品コンベヤ16に追従して移動するプッシャによってこれら物品2を押し出して前記製品コンベヤ16の収容部14内に挿入する。
(もっと読む)
物品移載装置および物品移載方法
【課題】箱体への物品の投入時に、物品が箱体の外にこぼれ落ちることを防止できる物品移載装置および物品移載方法を提供する。
【解決手段】箱体17の収納容積の種別を箱センサ36,37により判別し、箱体17に既に収納されている物品16の体積を、箱体17の上方に位置した距離センサ35により検出されるデータにより求め、箱体17内の物品16の容積が箱体17の収納容積の一定の比率以上のとき、ベルト送り装置28によるベルト体27の送り出しが終了する前にチェーン駆動モータ24を駆動してチェーン23a,23bの移動を開始し、それに伴うベルト体27の一方の端辺部27aの周回を開始する。これにより、ベルト体27が箱体17内の一定の比率以上の物品16の上に載ることに起因して、ベルト体27に支持された物品16が箱体17の外部に放り出されることが回避される。
(もっと読む)
ワーク箱詰め装置
【課題】ワーク2を保持してケース6内に挿入するワーク保持挿入手段10が旋回する際に、センサの配線等が邪魔にならないようにする。
【解決手段】ワーク搬送バケットコンベヤ4によって搬送されてきたワーク2を、ワーク保持挿入手段10によって保持し、ケースコンベヤ8によって搬送されてきたケース6内に挿入する。ケース6内にワーク2を複数段積み重ねて挿入する場合、1段ずつ逆向きにして重ねるためにワーク保持挿入手段10を180度旋回させる。ワーク2が保持されているか否かを検知するためのセンサとして、光電管48を固定側のケースコンベヤ8の側方に設け、反射ミラー90をワーク保持挿入手段10側に設ける。ワーク2を保持しているときは光電管48からの光がワーク2によって拡散され、保持していないときには、ミラー90によって反射されるので、ワーク2の有無を検知できる。
(もっと読む)
搬送装置
【課題】物品群の前後端を効率よく揃えて当該物品群を搬送する搬送装置を提供する。
【解決手段】物品群Zを搬送する搬送装置1であって、物品群Zが滑動するシュート2と、シュート2の下方端に近接配置され、滑動した物品群Zが載置される載置台3と、載置台3の上方に配置されるコンベヤ4と、を備え、コンベヤ4は、載置台3上における物品群Zの搬送方向後端を押圧搬送可能な搬送片54を所定間隔で複数配設した無端索体51、及び、無端索体51を回転させる駆動手段6aを有する無端搬送手段を備えており、搬送片54は、シュート2の滑動面21上において物品群Zを受け止めて該物品群Zの搬送方向前端を揃えることを特徴とする搬送装置1。
(もっと読む)
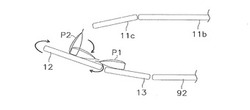
物品分離装置
【課題】物品を連続して搬送しながら、物品を傷めることなく、後続の物品から分離させる物品分離装置を提供する。
【解決手段】物品を列をなした状態で搬送する搬送コンベヤ手段10と、先頭の物品に当接係合する係合部材51と、係合部材を移動させる係合部材駆動手段50と、隣接する物品同士間に進入そして脱出する分離部材31と、分離部材を移動させる分離部材駆動手段30を備え、係合部材駆動手段50が係合部材を先頭の物品P1の前面に当接した状態で前進せしめ、かかる状態で分離部材駆動手段30が分離部材を物品間に入り込ませて物品の搬送速度より遅い速度で前進移動させると共に、係合部材駆動手段50は、係合部材を先頭の物品P1の前面への当接を解除した後に、分離部材31が入り込んでいる物品P1,P2間に進入せしめ、分離部材31の移動速度より速い速度で係合部材を前進させて物品P1を前方へ押し出し、後続の物品P2から分離させる。
(もっと読む)
包装装置
【課題】粒状物が2本の原反間の所期の位置に挟み込まれるようにして包装することができるようにした包装装置を提供する。
【解決手段】粒状物を挟み込むための凹部11aが少なくとも一方のローラ11,12の外周面に設けられ、重なり合いつつある2本の原反1,2間に粒状物を案内するシュートパイプ20が一対のローラ11,12の上流側に配備されている。ローラ11,12に設けられた凹部11aを目掛けてシュートパイプ20から粒状物を噴出させる。粒状物を1個ずつ入れる窪み部61,61,…を外周面に複数設けた排出側の回転ドラム(第2のドラム)60がシュートパイプ20の上流端に配備されている。窪み部61,61,…に空気を噴射することにより、粒状物が窪み部61,61,…内からシュートパイプ20内に一定の間隔を空けて噴出する噴射手段64が備えられている。
(もっと読む)
横形製袋充填機における物品供給装置
【課題】饅頭等の軟質で表面が損傷し易い物品であっても、物品を損傷したり変形することなく製袋手段で成形されるフィルムの収容領域の幅中央に向けて供給する。
【解決手段】ベルトコンベヤ12が配設された移動フレーム28は、機枠26に対して上流側で回動軸30を介して水平回動可能に支持される。機枠26に配設した調節モータ36で作動される調節機構38が移動フレーム28に連繋される。ベルトコンベヤ12の搬送終端近傍に、ベルトコンベヤ12で搬送される物品10の左右方向の載置位置を検出する第1センサ42が配設される。制御手段は、ベルトコンベヤ12の基準位置に対する現在の回動角度と、第1センサ42で検出された物品10の載置位置との関係から調節モータ36を駆動制御し、ベルトコンベヤ12の搬送終端を、物品10を筒状フィルムFの収容領域の幅中央に送り込む位置に向けて変位させる。
(もっと読む)
PTPシート搬送装置
【課題】PTPシートの搬送時間を短縮できると共に、十分な受渡し時間を確保することのできるPTPシート搬送装置を提供する。
【解決手段】PTPシート搬送装置11は反転装置12を備え、反転装置12にはハウジング16の周囲に90度間隔で固定クランプ装置21Aと可動クランプ装置21Bとが1つおきに交互に設けられている。反転装置12は、可動クランプ装置21Bの回動軸18の傘歯車26と、ハウジング16の駆動軸14と同心で回転可能に設けられ、傘歯車26に噛合される傘歯車27と、傘歯車27の回転及び停止を駆動制御する駆動制御機構とを備えている。そして、受取り区間や第1受渡し区間等に可動クランプ装置21Bが在る場合においては、傘歯車27をハウジング16と同期して回転させることにより、可動クランプ装置21Bが回転軸18の軸線回りに回転しない構成となる。
(もっと読む)
クロスネット自動包装機集中設置式選果包装選別装置
【課題】
桃、梨、リンゴ等の選果機械設備を利用しての選果作業に於いて、果物にクロスネットを装着する作業部門が他作業部門の作業効率に対して極めて効率が悪く、その結果に於いて、排出口増と包装機械設備の数による改善策の選択などがなされた。すなわち設備の充実方法として、選別機の大型化を招いた。処理能力の多少の改善は見られたが、設備費、人件費は倍額以上となり、選果コストは増大し、地域産業振興に大きなマイナスとなっている現在、一日も早い改善策が望まれる。
【解決手段】
クロスネット自動包装機集中設置装置を開発。さらに大面一面選別搬流排出コンベアー装置の開発により、選別機のコンパクト化だけでなくクロスネット包装箱詰め作業の単純作業化が実現、選別機械設備費の大幅削減、大幅省力化も実現できる自動包装箱詰めラインの構築を示し、選果コスト大幅減少可能な選果選別装置を提供できる。
(もっと読む)
複数の食製品の半重ね方法及び装置
【課題】扁平状な食製品を半重ねする方法及び装置を提供する。
【解決手段】食製品5を搬送する搬送コンベア7の搬送方向に長い一対の製品受け部材23を開閉自在に備えた製品受け装置19における前記一対の製品受け部材23を、前記搬送コンベア7における搬送方向の上流側へ相対的に移動し一対の製品受け部材23を閉動作して、当該一対の製品受け部材23の長手方向の受け入れ位置に、食製品5を受け入れて保持する。次に、前記一対の製品受け部材23の長手方向の前記受け入れ位置よりも上流側の所定位置に対応する下方位置に、前記次の食製品5が達したときに、前記一対の製品受け部材23を開動作して、保持していた食製品5を前記次の食製品5に重ねる。そして、前記次の食製品5が前記受け入れ位置に対応したときに、前記一対の製品受け部材23を閉動作して重ねた状態の食製品5を受け入れて保持することを、複数回繰り返す。
(もっと読む)
食品整列供給システム
【課題】簡単な構造で、食品を搬送しつつその厚さ方向を横に向けて縦横に複数列をなすように整列した食品群として包装装置に供給することのできる食品整列供給システムを提供する。
【解決手段】伏姿勢で載置される多数の食品Fを複数の列に整列して供給搬送する整列搬送装置2と、送り出されてくる各列の食品Fを単列ずつに区分するとともに、搬送しつつ起立姿勢にして送り出す姿勢変更搬送装置3と、送り出されてくる各列の食品Fを列を保持した状態で中間搬送するとともに搬送方向後端で各列の間隔が狭くなるように寄せる中間搬送装置4と、送り出されてくる各列の起立姿勢の食品Fを各列について1個ずつの横方向に並んだ食品群FGとして送り出すグループ形成装置5と、グループ形成装置5から送り出されてくる食品群FGを排出搬送する排出搬送装置6と、制御部7とを設ける。
(もっと読む)
物品把持装置
【課題】 複数の物品を把持する物品把持装置において、それらの物品の組合せの変更に簡易に対応でき、各物品の包装体に対する容積比を高くし得るようにそれらの物品を把持すること。
【解決手段】 主物品1を把持する第1把持手段40と、第1把持手段40により把持された主物品1の側部との間にサブ物品2を挟んで把持する第2把持手段50とを有する物品把持装置30であって、前記第2把持手段50は、第1把持手段40により把持されて相隣る2個の主物品1の側部によって形成される凹状部に、該主物品1の側部の形状に倣うサブ物品2を挟み付けるもの。
(もっと読む)
箱詰装置
【課題】起立姿勢の物品群の箱詰を可能にする箱詰装置を提供する。
【解決手段】箱詰装置は、包材からなる物品Bが隣接する物品と一部分が重なり合った状態で載置された物品群Cを位置Pまで搬送する搬送コンベア316R及び316Lと、所定位置Pにおいて物品群Cを起立姿勢にする立上部と、該起立姿勢となった物品群Cを所定位置Pから物品群Cが収容される段ボール箱まで移送するキャッチャ410とを備える。
(もっと読む)
箱詰め装置
【課題】 物品の箱詰めを高速に行うことができ、箱に投下した物品の姿勢が乱れるのを防止することができる箱詰め装置を提供すること。
【解決手段】 第3及び第4の羽根車21、22の下方の所定位置に一時保持装置40を設け、一時保持装置40は、受け取り角度位置において投下装置20から投下された複数の物品を受け取って、減速しながら停止角度位置に停止し、その後、複数の物品を箱に落下させる。
(もっと読む)
1 - 20 / 73
[ Back to top ]