
Fターム[3F027FA12]の内容
Fターム[3F027FA12]に分類される特許
61 - 80 / 147
作業工程間搬送装置および作業工程管理システム
【課題】 搬送対象物の作業工程に積極的に寄与し、生産性(作業効率)を向上させる搬送装置の提供、すなわち、従来は、あくまでも作業工程において従属的装置であった搬送装置を生産性(作業効率)向上のために主導的装置とすることにある。
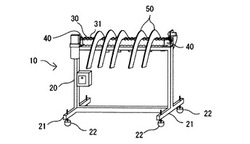
【解決手段】 作業工程間搬送装置10は、市販のアルミフレームを使用した構造躯体20に細幅の搬送ベルト30を備えたものである。搬送ベルト30は、スピードコントロール機能を備えた駆動ローラー(駆動モーター)40により回転駆動を得て、この搬送ベルト30上に載置された搬送対象物50を縦置きにて搬送する。
(もっと読む)
搬送装置

【課題】動力源に電力を用いず、作業者の両手は常時ワークの保持のみに専念させ、作業者が安全に送り操作が出来る自動搬送装置の提供。
【解決手段】平行に配置された複数の板状部材と、無限循環するチェーン3とを有し、板状部材の長手方向に対して垂直な方向にワークWを搬送する搬送装置において、板状部材の各々はワーク載置用の受け部材7A、7Bを備え、ワーク取出側にはワーク取出検知スイッチ9が設けられ、ワーク取出検知スイッチ9は感知部にワークが接触すると制御装置に感知信号を発信する機能を有している。
(もっと読む)
知的製品供給システムおよび方法
【課題】知的製品供給システムを提供する。
【解決手段】知的製品供給システムは、複数の列として形成され各列が投入機構と送出機構の間の処理方向に沿って直列に配置された1以上の搬送モジュールを含む配列であって、搬送モジュールの少なくともいくつかが可変速度搬送モジュールであり、個々の可変速度搬送モジュールが、後続モジュールまたは送出機構へ製品を供給すべく先行モジュールまたは投入機構から製品を受け入れる第1端部から第2端部へ製品を搬送するモジュール搬送機構および製品搬送速度を制御すべくモジュール搬送機構に接続された速度制御要素を含む配列と、製品がどの経路を辿るかを記述する計画を作成し投入機構により配列へ不規則に配送された製品のグループを指定された製品構成に従い向きを揃えて同期的に送出機構へ搬送すべく列の少なくとも1個のモジュールを計画に従い動作させるべく速度制御要素と接続されたプランナとを含む。
(もっと読む)
物体の有無、特定位置又は通過を検出するための検出器及び検出装置
【課題】占有スペースの増大を抑制しながら、可動側の検出器と固定側との配線処理を不要としてケーブルの断線を防止するとともに、可動側の検出器用バッテリーを不要にする。
【解決手段】RFIDタグ3の半導体チップ3Aとアンテナ3Bとの接続を切り離して外部に取り出した端子3C,3Dに、検出位置に設置した常時開形のスイッチ4を接続して検出器2とし、リーダ5がアンテナ5Bを通してRFIDタグ3にコマンドメッセージを送信し、RFIDタグ3からの応答メッセージを受信することができない場合はスイッチ4がオフである非検出状態とし、RFIDタグ3からの応答メッセージを受信することができた場合はスイッチ4がオンである検出状態とする。
(もっと読む)
コンベア装置
【課題】本発明は、各電源器を並列接続可能とし、装置全体として電源器の容量が縮減できるコンベア装置を提供することを目的とした。
【解決手段】搬送方向に並ぶ複数のゾーンに区分され、1又は2以上の駆動用モータ14に電力を供給する電源器11が備えられたコンベア装置1であって、各電源器11の出力電流を検知できる電流検知手段12を備え、電流監視手段12が過大な電流を検知した場合に、当該電源器11と他の電源器11を並列接続状態とする構成とする。
(もっと読む)
搬送装置
【課題】長尺状シートの異常な送り出しを防止し、長尺状シートを良好に搬出することのできる搬送装置を提供する。
【解決手段】長尺状シートGを該長尺状シートGの長手方向に搬送する第一搬送手段21と、該第一搬送手段21から送り出された長尺状シートGを第一搬送手段21の搬送方向に沿って斜めに交差する方向へ搬送する第二搬送手段22と、これら第一搬送手段21及び第二搬送手段22の運転停止を制御する制御部4とを有し、該制御部4は、第一搬送手段21から送り出された長尺状シートGの先端が第二搬送手段22に接触する以前のタイミングで第二搬送手段22の運転を第一搬送手段21の送り速度のうち第二搬送手段22の搬送方向成分以上の速度で開始するように制御することを特徴とする。
(もっと読む)
基板搬送装置および基板処理装置
【課題】装置寸法を長くすることなく、効率的に基板の搬送速度を途中で変更できる搬送技術を提供する。
【解決手段】直列配置された2つの搬送機構の境界を越えて基板を搬送するにあたり、基板がこの境界上を移動して受渡されている受渡期間(時間T15〜時間T16)を含んだ時間帯(時間T11〜時間T12)で、2つの搬送機構の搬送速度を整合させつつ減速させる同期制御を行う。この減速過程における時間−速度の関係をS字曲線とすることにより、基板に加わる加速度の急激な変化を防止できる。また、受渡期間を減速期間として利用することにより、それ以前に減速を完了させたり、基板の受渡し後に減速を開始させたりする場合と比較して搬送が効率的となる。
(もっと読む)
搬送部位置決め方法、及び搬送装置
【課題】簡易な機構で加熱炉内でのワーク又は搬送用キャリアの位置決めが可能となる搬送部位置決め方法の提供。
【解決手段】ワークを固定するキャリアパレット40と、キャリアパレット40を搬送する搬送用コンベア20と、ワークの加熱を行う加熱炉と、加熱炉内でキャリアパレット40の位置決めを行う位置決め機構とを備え、キャリアパレット40を位置決め機構で所定の位置に停止させる搬送部位置決め方法において、加熱炉は、ワークを加熱するハロゲンヒータ30を複数備え、キャリアパレット40に突起及び切欠溝を備え、キャリアストッパにクシ歯状に複数本形成された突起と係合するストッパ突起35aを有し、キャリアストッパを前進させることで、ストッパ突起35aと突起を係合させ、複数枚のキャリアパレット40をハロゲンヒータ30と対応する位置に一度に位置決めし、ワークを加熱する。
(もっと読む)
物品搬送システム
【課題】所望の搬送物品のRFタグに対してデータを適切に読み書きする。
【解決手段】物品搬送システム1において、搬送物品14を第1の搬送物品移動手段7により移動させ、RFタグ16と反射器11との間の距離をアンテナ9から送信される電波の波長の4分の1の奇数倍に設定する。RFタグ16を通過して反射器11に到達する電波の位相と反射器11で反射されてRFタグ16に到達する電波の位相とが一致され、それらを合成した分の送信パワーを持つ電波がRFタグ16に与えられると共に、RFタグ16から送信されて反射器11に到達する電波の位相と反射器11で反射されてRFタグ16を通過してアンテナ9に到達する電波の位相とが一致され、それらを合成した分の送信パワーを持つ電波がアンテナ9に与えられる。
(もっと読む)
X線検査装置
【課題】X線画像のぶれを防止し、物品の不良を精度良く検査することが目的とされる。
【解決手段】X線検査装置1は、搬送される物品の検査をX線画像Iに基づいて行う装置であって、検出部171と、制御部172とを備える。検出部171は、X線画像Iから物品の搬送速度に関するデータDを検出する。制御部172は、検出部171で検出されたデータDに基づいて搬送速度を制御する。具体的には、検出部171は、データDとしてX線画像Iでの物品の長さLを検出する。制御部172は、検出部171で検出された長さLを、物品の長さの実測値L0に漸近させる。
(もっと読む)
ガラス搬送装置及びその制御方法、並びに車両の製造方法
【課題】ガラスを精度よく取付位置まで搬送することができるガラス搬送装置、ガラス搬送装置の制御方法、及び自動車の製造方法を提供すること。
【解決手段】本発明の一態様にかかるガラス搬送装置は、自動車100のガラスをその取付位置まで搬送するガラス搬送装置である。ガラスを保持する吸着治具60と、吸着治具60を移動させるための関節52を有するアーム機構50と、吸着治具60で保持したリアガラス2bを、ボディ101形状に応じた仮想ガイドGrに沿って移動させるよう、アーム機構50を制御する制御部80とを備えている。フロントガラス2aの取付位置の高さを記憶し、取付位置の高さに応じて仮想ガイド高さを算出し、仮想ガイド高さの仮想ガイドGrに沿って、リアガラス2aを移動させている
(もっと読む)
仕分け装置
【課題】様々な種類の荷物を効率よくかつ安全に仕分けるための仕分け装置を提供すること。
【解決手段】コンベアにより搬送される複数の荷物の仕分けを行う仕分け装置10であって、複数の荷物それぞれの特性情報を取得する特性情報取得部17と、複数の荷物のうちの所定の荷物をコンベアから分岐した第1分岐コンベア〜第3分岐コンベアへ送り出す分岐動作を行う第1分岐部11〜第3分岐部13と、コンベアへ連続して送り出される2つの荷物の間の距離である荷物間隔を調整する間隔調整部18と、特性情報取得部17が取得した特性情報に応じて、第1分岐部11〜第3分岐部13に分岐動作を変化させる分岐制御部15aと、当該2つの荷物のうちの先の荷物についての分岐動作に必要な時間が長いほど、間隔調整部18に当該荷物間隔を長くさせる間隔制御部15bとを備える。
(もっと読む)
容器検知装置
【課題】容器の滞留を安定して検知可能な容器検知装置を提供する。
【解決手段】瓶Bの搬送経路Rに突出する突出位置Pと瓶Bの搬送経路R外に後退する後退位置Qとの間で移動可能なセンサーバー21を有する可動部2と、センサーバー21が後退位置Qにあることを検出するセンサ部3と、を備えた容器検知装置1であって、センサーバー21は、搬送方向に関して複数の容器と接触可能な長さを有し、センサーバー21の両端には、搬送経路Rから搬送経路R外に徐々に後退する両端部21bが設けられている。
(もっと読む)
検査支援方法及びプログラム
【課題】搬送装置の異常動作又は異常状態が発生したときに、その原因である制御プログラムの不具合を検出することを支援する。
【解決手段】搬送される被搬送体の位置を管理する工程と、搬送路の任意の位置に、被搬送体が通過した時点で制御プログラムの実行を一時停止させるための制御プログラム停止位置を設定する工程と、被搬送体が前記制御プログラム停止位置に達したか否かを判断する工程と、被搬送体が前記制御プログラム停止位置に達したと判断した場合、前記制御プログラムの実行を一時停止させる工程と、を有する。
(もっと読む)
搬送装置
【課題】安価な検出スイッチを用いてワークの端部の位置を特定することが可能な搬送装置を提供する。
【解決手段】検出手段は物体の移動方向に並置された第一および第二の検出スイッチを有する。制御手段は第一の検出スイッチが物体を検出したときに動力手段を停止させる。判定手段は第一の検出スイッチが物体を検出したのち第二の検出スイッチが物体を検出していない状態が所定時間以上継続した場合に物体が所定位置に停止したと判定し、第一の検出スイッチが物体を検出したのち所定時間以内に第二の検出スイッチが物体を検出した場合に物体が所定位置を超えたと判定する。
(もっと読む)
搬入装置及び包装機
【課題】搬入装置のセンタリング部材によりセンタリングされた以後に、被包装物の搬送不良があった場合においても、搬入装置より後段に接続される包装機がエラーで停止することのない搬入装置、包装機を提供する。
【解決手段】包装機に被包装物を搬入供給する搬入装置であって、被包装物を包装機に向けて搬送する搬送コンベア上の被包装物を該搬送コンベアの幅方向に位置規制するセンタリング部材と、前記センタリング部材近傍に設けられ、被包装物の搬送を規制及び規制の解除をするストッパ手段と、被包装物を検知する第一センサ及び第二センサと、被包装物のサイズを計測するサイズ計測手段と、計測したサイズデータを一時記憶する記憶手段と、前記第一センサによる被包装物の検知から所定時間内に前記第二センサにより当該被包装物が検知されない場合、前記記憶手段に一時記憶されたサイズデータを無効な包装制御データとする制御手段を備える。
(もっと読む)
搬送装置
【課題】搬送方向の下流側に隣接する搬送手段にて搬送物を非接触状態で支持して搬送しながら、複数の搬送手段間で搬送物を乗り移らせて搬送することができる搬送装置を提供する。
【解決手段】搬送物2の下面部に向けて空気を送風して、搬送物2を非接触状態で支持する送風式支持手段と、その送風式支持手段にて支持される搬送物に対して搬送方向での推進力を付与する推進力付与手段とを備えた搬送手段1が、搬送方向に複数並べて設けられ、それら複数の搬送手段1の運転を制御する制御手段Hが設けられている搬送装置において、制御手段Hは、搬送方向の下流側に隣接する搬送手段1が運転状態である搬送手段1については、運転開始を許容し、搬送方向の下流側に隣接する搬送手段1が非運転状態である搬送手段1については、運転開始を禁止するように構成されている。
(もっと読む)
テーブル搬送物の自動搬送方法および装置
【課題】デッドロックを発生させずに、複数の搬送物の自動搬送を可能とする、テーブル搬送物の自動搬送方法および装置を提供することを課題とする。
【解決手段】対象とする搬送物のルートを登録するに際して、各テーブル間の移動方向を確認し、ルート上全てのテーブル間で他の搬送物の逆方向の移動が存在しない場合に、ルート上のテーブル間の移動を予約するとともに、予約したテーブル間の前記ルートと逆方向への移動の予約を禁止するルート登録ロジック工程と、搬送物のルート登録後、次搬送先のテーブルが使用中であるかを確認し、使用中で無ければ次搬送先のテーブルに搬送するとともに、この搬送方向への他の搬送物の移動予約がなければ、前記搬送方向と逆方向への移動の予約禁止を解除する搬送ロジック工程とを有する。
(もっと読む)
ローラコンベア及び搬送制御方法
【課題】本発明は、ローラの駆動に起因した塵埃の飛散が抑制されたローラコンベアを提供することを課題とする。
【解決手段】ローラコンベアにおいて、並列して連続的に配置された複数のローラにより搬送路を構成する。複数のローラ10が、搬送路の両側の各々に整列して配置される。ローラ10の各々に対しローラ駆動モータ12が設けられる。ローラ10は対応するローラ駆動モータ12の回転軸12bに直結されている。
(もっと読む)
基板搬送装置および基板搬送方法
【課題】基板のサイズに関わらず安定した搬送を実現する基板搬送装置を提供する。
【解決手段】基板1に所定の加工を施すための加工領域が設けられた搬送路3と、搬送路3に搬入された基板1を上流から下流に向けて搬送する搬送コンベア4と、基板搬送方向に移動可能な移動体5と、移動体5に設けられて基板1を加工領域より上流側となる位置s2で検知する第1センサ9と、移動体5の第1センサ9から基板搬送方向に所定の距離をおいた位置に設けられて搬送中の基板1に接触して停止させるストッパ11と、第1センサ9が基板1を検知すると基板搬送速度より低い速度で移動体5の移動を開始させるとともに基板1がストッパ11に接触した後に停止するように移動体5の移動を制御する制御手段を備えた。
(もっと読む)
61 - 80 / 147
[ Back to top ]