
Fターム[3F081FB03]の内容
コンベア上の物品の姿勢制御 (7,432) | 装置の運転制御 (229) | 可逆(正逆)駆動制御 (18)
Fターム[3F081FB03]に分類される特許
1 - 18 / 18
容器搬送装置
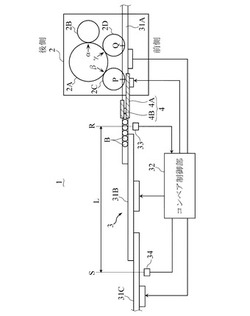
【課題】多数のボトルを一列に連続的に搬送する際、複数のボトルが連続搬送状態になったときに先頭のボトルに過大な押圧力が作用するのを抑制する。
【解決手段】ラベル装着システム1のラベラー2には複数のコンベア31A,31B,31C,…を一列に配置して多数のボトルBをラベラー2に供給するラベル搬送装置3が設けらる。コンベア31Aには各ボトルBのラベラー2への供給タイミングを調整するスクリュー4が設けられ、このスクリュー4の上流側に複数のボトルBを連続搬送状態にするボトル蓄積区間が設けられている。コンベア31A〜31Cのうち、コンベア31Bは順逆両方向に搬送方向が切換可能なコンベアで構成される。ボトル蓄積区間のボトルBの連続搬送状態の数が所定数以上なると、コンベア31Bの搬送方向を逆方向に切り換え、コンベア31B上のボトルBに上流側方向の押圧力を発生させることで、連続搬送状態の先頭のボトルBに作用する押圧力を低減する。
(もっと読む)
物品搬送装置

【課題】複数の物品が積み重ねられた積層物品を、直交する搬送路間で姿勢を乱すことなく安定して搬送する。
【解決手段】移送コンベヤ14は、独立して走行する第1無端チェン56および第2無端チェン58を備える。第1無端チェン56に配設した第1の支持部材64と、第2無端チェン58に配設した第2の支持部材68とは走行方向に交互に位置する。移送コンベヤ14は、送出位置Eの区画部18に収容した積層物品Wの前後を一対の支持部材64,68で支持して送り出す。送りコンベヤ12の搬送始端部に搬送した積層物品Wの後側の支持部材64,68を、送出位置Eの積層物品Wの前側まで後退し、前側の支持部材64,68を前進して積層物品Wの搬送経路から退避すると共に、前側の支持部材64,68を配設した無端チェン56,58の他の支持部材64,68を、送出位置Eの積層物品Wの後側まで移動する。
(もっと読む)
搬送装置
【課題】必要とされるコストを抑えつつ、任意の型の容器を確実かつ安定的に反転させることが可能な搬送装置を提供すること。
【解決手段】本発明に係る搬送装置100は、所定の間隔をおいて対向する2つの側壁211、側壁の間に搬送方向に沿って一列に回動自在に配置された上部ローラー212、及び、側壁の間に上部ローラーに212対向するように搬送方向に沿って一列に回動自在に配置された下部ローラー213、により形成され、2つの側壁と上部ローラー212と下部ローラー213とにより囲まれた収容領域210aに容器を収容するように構成された、箱型の回転体210と、中心軸の周りに回動自在となるように回転体210を支持する筐体220と、筐体220に取り付けられ回転体210を回動させるモーター230と、を具備する。
(もっと読む)
ワーク整列装置
【課題】 コンベア上に不規則に配置されて搬送される多数のワークを1列に整列させることができ、その過程でワーク詰まりが発生しにくいワーク整列装置を提供する。
【解決手段】 不規則な配置で載せられた多数のワークWを搬送するコンベア2を有する。制御装置30により、コンベア2の正転と逆転とを制御する。コンベア2上に、ワークガイド6、ストッパ7、および当り部材8を設ける。ワークガイド6は、狭まり部6bにより、コンベア2上のワークWの通行可能幅を、搬送方向の途中部から下流側へ行くに従い徐々に狭めて1個だけが通行可能な幅にする。ストッパ7は、コンベア2の逆転時に、狭まり部6bにより1列に整列させられたワーク群を整列状態を維持して受け止める。当り部材8は、コンベア2の逆転時に、上流側へ逆流するワークを幅方向に逃がして各ワークWの幅方向の位置関係を変化させる。
(もっと読む)
仕分装置
【課題】簡単な構造および制御で被搬送物の姿勢や位置の変更を行って搬出することができ、大量の被搬送物を短い間隔で連続的に姿勢や位置の変更することで作業効率を向上できる仕分装置を提供すること。
【解決手段】ボールコンベヤ110の下端から突出したフリーボール111に回転力を与えるターンテーブル121によってボールコンベヤ110の上方に載置された被搬送物を移動させる仕分装置100において、駆動制御機構130が、ボールコンベヤ110とターンテーブル121とをそれぞれ独立して同時に駆動制御可能であること。
(もっと読む)
板状部材のラベル貼付システム
【課題】 できるだけ板状部材の搬送スペースが小さくなるように、板状部材の送り出し、板状部材へのラベル貼付及びラベル貼付された板状部材の受け入れを一連に行うことができるようにする。
【解決手段】 複数の板状部材Wを起立させ且つその一方面Waが水平一方向Haを向いて重畳するように列設させて保持し、起立させた状態で水平一方向Haの最前位の板状部材Wから該水平一方向Haに直交する水平直交一方向Vaに順次送り出す送り出し装置SFと、送り出された板状部材Wを起立させた状態で搬送するとともに板状部材Wの一方面WaにラベルLを貼付するラベル貼付装置SPと、ラベルLが貼付された板状部材Wを起立させた状態で順次受け入れるとともに、受け入れた複数の板状部材Wを起立させ且つその一方面Waが水平一方向Haを向いて重畳するように列設させて保持する受け入れ装置SRとを備えた。
(もっと読む)
搬送装置
【課題】被搬送物を設定された複数の特定角度に切り換えることができる搬送装置を提供する。
【解決手段】回転自在に支承された被搬送物支持具12を設定された複数の特定ロック角度でロックするロック手段27とロック解除用被操作具29が設けられた搬送用走行体1の停止位置には、ロック解除用被操作具29に対して作用するロック解除操作手段40と被搬送物支持具12の回転駆動手段41とが併設され、回転駆動手段41は、被搬送物支持具12の回転軸心と平行な方向に出退移動自在な可動台43上に軸支された駆動用回転体44を備え、この駆動用回転体44には、その偏心位置から突設された駆動ピン45とセンサー46が設けられ、被搬送物支持具12側には、駆動ピン45が嵌合可能な駆動ピン嵌合部23と、この駆動ピン嵌合部23に駆動ピン45が嵌合する以前の駆動用回転体44の回転によりセンサー46が検出できる被検出部24が設けられた構成。
(もっと読む)
反転装置
【課題】 搬送物を適切に把持して反転することで安定した上下反転を可能とする反転装置を提供することにある。
【解決手段】 搬送物2が載置されるトレイ3の搬送方向と平行な方向を中心として回転可能に設けられた回転体4と、回転体4内に設けられ搬送物を反転する反転ユニット10とを備え、反転ユニット10は、回転体4に取り付けられ互いに正対するとともに、回転体4が回転することで上下が入れ替わる第1及び第2のコンベヤ体11,12と、トレイを第1及び第2のコンベヤ体11,12上に固定するクランプ部13と、第1及び第2のコンベヤ体11,12を近接離間する方向に駆動するコンベヤ昇降駆動部14と、ガイド部15とを有し、コンベヤ昇降駆動部14は、電動シリンダ41及び空気式ブレーキシリンダ42を有する。
(もっと読む)
搬送位置決め装置及びラベル貼着装置
【課題】簡単な構造にて容易かつ効率的に対象物を回転及び搬送経路に従って搬送することが可能な搬送位置決め装置及びラベル貼着装置を提供する。
【解決手段】軸線周りに回転可能とされる対象物Wを搬送経路に従って搬送する搬送位置決め装置2であって、前記軸線が通過する軌跡に沿う接触部を有する第1周回ベルト31Aと、前記軌跡に沿う接触部を有し、前記軌跡を挟んで前記第1周回ベルト31Aと反対側に配置される第2周回ベルト32Aと、を含む回転方向調整部30と、回転方向調整部30に接続される制御部40とを備え、前記第1周回ベルト31Aと前記第2周回ベルト32Aは、前記対象物Wを挟むように構成され、前記制御部40は、前記第1周回ベルト31Aと前記第2周回ベルト32Aとを、相対速度差を設けて前進、停止、後退可能に構成されていることを特徴とする。
(もっと読む)
板材反転機
【課題】小さいスペースで多種の板材を反転できる板材反転機の提供。
【解決手段】板材を搬送する第1搬送手段11aおよび第2搬送手段11bと、板材を保持する保持手段12と、板材とともに第1搬送手段11aおよび第2搬送手段11bを回転する回転手段と、制御手段(図示しない)とを有し、第1搬送手段11aおよび第2搬送手段11bを所定の間隔を保った状態でそれぞれの搬送面が相互に対向するように配置する。そして、板材は、第1搬送手段11aによって搬送され(a)、第1搬送手段11aの中心付近で静止され(b)、保持手段12で表裏面が挟持される(c)。その状態で、板材を回転させ(d)、反転させる(e)。その後、板材の保持を開放し(f)、第2搬送手段11bを用いて、板材を排出する(g)。
(もっと読む)
X線異物検出装置
【課題】簡単な操作によって被検査物に対するX線の照射角度を変更して容易にその照射角度を最適化し、さらに、装置サイズをコンパクトに維持する。
【解決手段】搬送面上の被検査物Wを所定の搬送方向Yに搬送する搬送手段5と、搬送面上を搬送される被検査物Wに向けてX線を照射するX線発生器18と、搬送面を挟んでX線発生器18と対向配置され、被検査物Wを透過してくるX線をX線検出面に受けるX線検出器19と、を備えるX線異物検出装置1において、搬送手段5が、搬送面を形成する搬送コンベア6を備えるとともに搬送面のX線検出面に対する角度が変更自在となるように傾斜可能に設けられ、且つ傾斜時に被検査物Wの側面を支持しながら被検査物Wの搬送をガイドするガイドコンベア12を備える。
(もっと読む)
板材振分装置
【課題】滑らかにかつ安定して板材を所望の向きに向けることができ、しかも、装置としてコンパクト化を図ることができる板材振分装置を提供する。
【解決手段】投入口20から板材21がその長手方向と直交する方向に沿って投入されて回転体22に収容される板材収容体23を備える。板材収容体23に投入された板材は判別手段24にてその姿勢状態が判別される。制御手段25は判別手段24にて判別された姿勢状態に基づいて回転体22の回転方向を決定する。回転駆動手段27は制御手段25にて決定された回転方向に板材収容体23の回転体22をその軸心廻りに回転させる。これによって、板材21を板材収容体23の排出口26から排出させる。
(もっと読む)
物品整列装置および物品整列ライン、並びに物品整列方法
【課題】搬送する複数の物品に対する衝撃を防止または緩和しつつ整列させることができる物品整列装置および物品整列ライン、並びに、物品整列方法を提供する。
【解決手段】この整列装置2は、複数の物品Kを載置する面の摩擦抵抗が、物品同士の摩擦抵抗よりも小さい可撓性のシート部材3と、そのシート部材3を搬送方向での一端側を保持部とし且つ他端側を移動部として支持する支持手段10と、シート部材3の移動部側をシート部材3上に載置される複数の物品Kの搬送方向での後端に沿わせて折り返すとともに、その折り返した状態のシート部材の移動部側を搬送方向に沿って保持部側に向けて引っ張る引っ張り手段5とを備え、折り返した状態のシート部材3で搬送方向に沿って複数の物品Kを移動させることで搬送方向とは直交する方向に沿って一列に整列させる。
(もっと読む)
物品位置決め装置
【課題】 生産ラインのコンベヤ上を搬送される円筒状容器に対し、円筒状容器の円周方向の方向制御を効率よく、高精度に行う。
【解決手段】搬送コンベヤ1の両側に、円筒状容器を挟み/回転させ/搬送する挟持搬送機構3と、円筒状容器の基準画像を検出する検出機構4と、必要に応じてバッファー機構6を設け、挟持搬送機構の回転方向を自在に切り替えることで容器搬送と基準画像を検出するための容器回転を同時に行ない、容器方向制御を行う。
(もっと読む)
ストックコンベヤ
【課題】ストック数の確保と省スペース化とを両立したストックコンベヤを提供する。
【解決手段】チェーン駆動モータ12によって駆動側スプロケットが正転/逆転駆動されると、一対のチェーン4,5間の相対する屈曲抑止部材が順次係合/解離され、一対のチェーン4,5の対向部9がワーク搬送面に対して繰出し/収容されることによりワーク搬送面とワーク受け13との間でワークが受け渡される。これにより、ワークを縦方向(上下方向)に並べてストックすることができ、ストック数の確保と省スペース化とを両立することができる。
(もっと読む)
薬剤供給ユニット
【課題】 薬剤スティックを整列させる作業を必要とすることなく、確実に所定数だけ供給する。
【解決手段】 筒状で両端部を封止された袋内に薬剤を収容してなる薬剤スティック5が複数収納される薬剤収納容器3と、該薬剤収納容器3が着脱自在に装着され、前記薬剤スティック5を1つずつ供給する薬剤供給部4とを備える。前記薬剤供給部4を、前記薬剤スティック5を長手方向に搬送可能とする通路14を有する搬送手段10と、該搬送手段10によって搬送された薬剤スティック5を、その長手方向に直交する斜め下方に移動させる傾斜面11aを備えた薬剤供給容器11と、該薬剤供給容器11に回転駆動可能に配設され、前記傾斜面11aに従って移動した薬剤スティック5を外周部に形成した保持凹部22に保持して搬送するロータ12とを備えた構成とする。
(もっと読む)
コイル台間隔調整装置
【課題】列設した複数のコイル台の夫々の間隔を効率良く調整する。
【解決手段】コイル台S2〜S3を、夫々のコイル台が所定の間隔で最接近するときの最接近位置と夫々のコイル台が所定の間隔で最離間するときの最離間位置との間で進退可能に構成する。また、固定フレーム4a・4bとコイル台S2・S3とを接近用ワイヤ8によって連設すると共に、固定フレーム4b〜4dとコイル台S3・S4とを離間用ワイヤ9によって連設する。さらに、接近用ワイヤ8及び離間用ワイヤ9をリール12に巻回させ、このリール12によって接近用ワイヤ8の巻取りと離間用ワイヤ9の巻出し、又は離間用ワイヤ9を巻取りと接近用ワイヤ8の巻出しを行う。
(もっと読む)
容器洗浄装置
【課題】1.8リットルびんのような重量のある容器4を、正確に位置決めして安定した姿勢で反転させる。
【解決手段】容器4を供給する搬送コンベヤ2の側方に容器反転手段14が配置されている。反転手段14は、回転軸24に取り付けられ、容器4の首部4aを掴むグリッパ26および容器4の胴部2bに当接して支持する支持ガイド16と、回転軸24を回転する駆動モーター50を備えている。グリッパ26は開閉式で、容器4の首部4aを両側からグリップする。また、支持ガイド16の向かい側にセンタリングガイド18が設けられている。搬送コンベヤ2によって搬送されてきた容器4を、回転してきた支持ガイド16と前進したセンタリングガイド18によって挟持して停止させ、グリッパ26によって容器4の首部4aを把持する。グリッパ26と支持ガイド16が一体的に回転して容器4を反転させる。
(もっと読む)
1 - 18 / 18
[ Back to top ]