
Fターム[4F035CD11]の内容
噴霧制御装置 (2,732) | スプレーヘッドの噴霧時の運動、駆動制御 (320) | 対象物と関連した運動、駆動制御 (71)
Fターム[4F035CD11]の下位に属するFターム
対象物に接近、離反するもの (25)
対象物の移送と同期するもの (16)
Fターム[4F035CD11]に分類される特許
1 - 20 / 30
マスキング治具を用いたマスキング装置
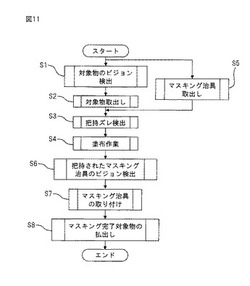
【課題】マスキング治具を用いたマスキング作業をロボットにより効率的に行うことができるマスキング装置の提供。
【解決手段】マスキング治具26を第2のロボット20で取り出すステップS5は、ステップS6の前までに完了していればよく、ステップS2が終了するまで、或いはステップS4と並行して行うことができる。第2のロボットによるマスキング治具の取出し作業を、第1のロボットによるワークの検出・取出し又は接着剤の塗布と並行して行うことができるので、サイクルタイムを短縮することができる。
(もっと読む)
塗装システム

【課題】塗装ブースの小型化を図ることができる塗装システムを提供すること。
【解決手段】天井11と側壁12a,12bとで囲まれた塗装ブース10と、塗装ブース10内に配置され、被塗装物2を搬送する搬送ライン50と、被塗装物2に対して塗装を行なう塗装ロボット20a,20bとを備える。そして、塗装ロボット20a,20bは、塗装ブース10の側壁12a,12b側に固定されたベース部21と、ベース部21に連結された7軸構成のアーム部22とを備える。
(もっと読む)
樹脂散布装置及びその制御方法
【課題】高い精度で、かつ大規模施工を可能にさせるものであり、周囲に樹脂を極力飛散させることのない樹脂散布装置及びその制御方法を提供する。
【解決手段】構造物Cの表面C1上を少なくとも一方向に移動可能な移動体部1、噴射口21から液状樹脂Rを噴射でき、移動体部1の移動方向に交わる方向へと移動可能な噴射ノズル部2、飛散防止カバー4aを有するミスト吸引部4を備え、飛散防止カバー4aが、上記噴射口21と上記構造物Cの表面C1との間の空間を覆うものであり、この飛散防止カバー4aには吸引口42aが開口されており、この吸引口42aが、集塵機5に連続する排気路Eの端部とされた樹脂散布装置を提供する。
(もっと読む)
携帯端末用筐体の塗装装置及びそれを用いた携帯端末用筐体の塗装方法
【課題】塗料の無駄、及び空調のためのエネルギーを抑えながら、インクジェット方式で携帯端末用筐体の塗装を可能にすること。
【解決手段】鉛直方向に回動自在の第1ステージ10と水平方向に回動自在の第2ステージ11を有したワーク供給テーブルを具備するワーク搬送装置5と、ワーク搬送装置5の軌道の途上に配設されたインクジェット装置12及びUV硬化装置16と、装置全体の作動を制御する制御部21を具備し、インクジェット装置12は上下動自在のプリンタヘッド14を具備し、ワーク搬送装置5によって移動しているワークにプリンタヘッド14からインクを着弾させることでワーク平面を塗装し、第1ステージ10及び第2ステージ11を所定角度回動することでプリンタヘッド14に対してワークを所定角度だけ傾けるとともにプリンタヘッド14を所定長だけ上昇することで、ワークの側面を塗装可能にした。
(もっと読む)
塗布作業シミュレーション装置
【課題】複数のノズルを備えたスプレー装置に対応し、噴射物の塗布時間を算出する。
【解決手段】塗布作業シミュレーション装置(10)は、スプレー装置(30)に対するノズル(31)の位置および噴射物の噴射形状を指定する指定部(19)と、噴射物の出力等の指令を含むロボット(20)の動作プログラムを実行して、シミュレーションによりロボットの三次元モデルを動作させ、噴射形状の三次元モデルと被塗布部材の三次元モデルとの間の干渉箇所を所定時間毎に算出する干渉箇所算出部(13)と、被塗布部材の三次元モデルの表面上において、干渉箇所のそれぞれにおいて干渉回数を所定時間毎に算出する干渉回数算出部(14)と、所定時間毎の干渉回数から塗布時間を算出する塗布時間算出部(15)と、塗布時間に応じて被塗布部材の三次元モデルの表面を色分けして表示する表示部(16)と、を含む。
(もっと読む)
液体噴射装置
【課題】構造を単純化したインク噴射装置を提供する。
【解決手段】インク噴射装置1は、シリンダ5と、シリンダ5内に配置され起動信号を受けてガスを放出するガス発生器9と、シリンダ5に形成され、外部との接続口となる放出口11と、シリンダ5内であって、ガス発生器9と放出口11との間に配置され、特殊インク12を内蔵する可撓性を備えたインクパック7と、シリンダ5内であって、ガス発生器9とインクパック7との間に配置され、ガス発生器9からの加圧力により移動してインクパック7を押圧するピストン8と、シリンダ5内であって、インクパック7と放出口11との間に配置され、インクパック7を破損するカッター10とを備え、ガス発生器9からの加圧力により、ピストン8を移動させてインクパック7をカッター10に押し付けて破損させると共に、インクパック7から特殊インクを押し出し、放出口11から噴射する。
(もっと読む)
塗装ガン
【課題】機能性及び利便性の高い塗装ガンを提供する。
【解決手段】ガン本体1の先端部1aに形成した向きが互いに異なる複数のノズル取付面部4a,4bに、塗料ノズル2を取り付ける複数のノズル固定部5a,5bを設け、各ノズル固定部5a,5bに設けた塗料ノズル2への塗料送出口7のうち塗料送出状態とするものを択一的に切り換える切換手段18を設ける。
(もっと読む)
インクジェット塗布装置及び方法
【課題】フィルム表面の塗布すべき目標位置を直接計測して補正し、インクジェット塗布ヘッドのノズル孔から正しい位置に液滴を射出することにより、フィルムの塗布品質が向上する。
【解決手段】巻出側フィルムロール2から巻き出されたフィルム1は、その塗布対象エリアが塗布部17で吸着テーブル10上に位置するように搬送される。インクジェット塗布ヘッドに隣接して撮像カメラを設置し、該塗布ヘッド15と該撮像カメラ19は設置位置が一体となって塗布ヘッドユニット部を形成し、塗布ヘッドユニットは吸着テーブルの上方において3次元的に移動可能なXYZ軸方向駆動手段によって移動し、塗布ヘッドによる塗布動作中に撮像カメラで次に塗布する位置を予め撮像し、撮像カメラによる撮像結果を画像処理手段で処理することによって当初設定された塗布位置とのずれ量を補正して、次に塗布する位置への塗布ヘッドを移動させる。
(もっと読む)
特に大規模構造物の部品の表面を円滑化する方法及び装置
【課題】本発明は特に大規模構造物の部品の表面を円滑化する方法及び装置を提供する。
【解決手段】本発明は、特に例えば船の船体のような大規模構造物の部品(3)の表面(2)を、次なる塗装のために円滑化する方法に関し、次の工程を有する:部品(3)の表面(2)の凹凸の計測;素材除去及び/又は均一化剤による素材塗布による凹凸の均一化;表面(2)の計測前に表面(2)の所定の位置に参照目印を付加し、表面(2)の凹凸の計測の間に参照目印を考慮に入れる。
(もっと読む)
塗装機器および塗装方法
本発明は、塗装剤を用いて部品を塗装する、具体的には塗料を用いて車両部品を塗装する塗装機器および塗装方法に関連し、塗装剤を塗布する塗布装置を備える。本発明によれば、塗布装置は、少なくとも1つの塗装剤ノズルから塗装剤を吐出するプリントヘッド(8、9)である。 (もっと読む)
層形成装置
【課題】安価で、かつ、適切に反射層を形成できる層形成装置を提供すること。
【解決手段】スプレー塗布装置は、互いに交差する傾斜面14および直交面15が所定方向に沿って交互に形成された被投影面12を有するスクリーン素材11の前記傾斜面14に反射層16を形成する装置であって、被投影面12を送り用ローラ32の外周面323に沿って湾曲させた状態でスクリーン素材11を保持する保持装置3と、スプレー方向N1が傾斜面14に対して斜め方向となるようにノズル本体41を支持するノズル傾斜装置42とを備える。このため、スプレーの際、スプレー材料が湾曲された被投影面12に対して斜め方向にスプレーされるので、傾斜面14に適切に反射層16を形成することができる。また、スプレーによって反射層16を形成できるので、蒸着装置のような高価な装置を使用せずに安価に形成できる。
(もっと読む)
成膜装置及び成膜方法
【課題】基板の中央部と周縁部との膜厚のばらつきをより抑制することが可能な成膜装置及び成膜方法を提供する。
【解決手段】本発明の成膜装置は、スプレーノズル6がガラス基板4に液体を噴射する際に、制御部9が、ガラス基板4の周辺部Aから中央部Bまでは、スプレーノズル6を加速させながら移動させる。また、スプレーノズル6が中央部Bに達すると、制御部9は、ガラス基板4の中央部Bでは、スプレーノズル6を等速度で移動させる。さらに、制御部9は、中央部Bから周辺部Cまでは、スプレーノズル6の移動速度を中央部Bでの等速度から減速させる。
(もっと読む)
長尺材の塗装装置、および長尺材の塗装方法
【課題】長尺材の外面に対し塗料を噴霧することにより、この長尺材の外面を塗装して製品を得る場合に、この製品の外面の全体に所望の塗装塗料の均一性が、より確実に得られるようにする。
【解決手段】長尺材の塗装装置は、長尺材2を水平姿勢に支持するワーク支持装置5と、長尺材2の外面に対し塗料6を噴霧する塗料噴霧装置7と、この塗料噴霧装置7を収容して支持すると共に、この塗料噴霧装置7による塗料6の噴霧対象となる長尺材2の長手方向での一部分2aを収容する塗装ブース8とを備える。長尺材2の長手方向で、この長尺材2と塗装ブース8とを相対移動可能にする。長尺材2の上面側に対しその上方から塗料噴霧装置7により塗料6を噴霧するようにする。長尺材2を、その長手方向に沿った軸心19回りに自転可能とする自転装置20を設ける。
(もっと読む)
自走型洗浄・塗装方法及び自走型の洗浄・塗装機
【課題】危険な人手を必要とする作業を省き、環境に悪影響を及ぼすことなく、品質の良い塗装を行う自走型洗浄・塗装方法及び自走型洗浄・塗装機を提供する。
【解決手段】位置を検知するセンサ1の情報に基づいて車両7の可動範囲を決め、車両の可動範囲内では、洗浄の状態を検知するセンサ2の情報に基づいて洗浄行い、車両7の可動範囲外の洗浄は、洗浄ガン3の位置及び角度を調節することにより洗浄を行い、洗浄水を飛散させることなく洗浄を行った後、位置を検知するセンサ1の情報に基づいて、車両7の可動範囲を決め、車両7の可動範囲内では、塗装面の状態を検知するセンサ2の情報に基づいて塗装を行い、車両7の可動範囲外の塗装は、塗装ガン3の位置及び角度を調節することにより塗装を行い、塗料を飛散させることなく塗装を行うことを特徴とする自走型洗浄・塗装方法及び自走型洗浄・塗装機。
(もっと読む)
塗布システム
【課題】表面に凹凸のある対象物、例えば人間等60の皮膚に薬剤を塗布する専用の塗布機構を実現する場合、高価なシステムを用いて対象物の形状を事前に高い精度で測定する必要がなく、対象物の動きおよび事前に検出できないような微細な凹凸に対し、安価で素早い応答特性を有する塗布システムを提供する。
【解決手段】塗布システム1は塗布機構10a等と駆動部20とを備えており、塗布機構10a等は、人間等60の背中等の外部との接触部分topを有する塗布部12と、接触部分topの反対側(内側)に片側が接続され、接触部分topの外部との接触に応じて伸縮可能な伸縮部14と、伸縮部14の他の片側と接続され、伸縮部14の伸縮量を測定する測定部16とを備えている。駆動部20は、測定部16により測定された伸縮部14の伸縮量に応じて塗布機構10a等の運動を変化させることができる。
(もっと読む)
塗装設備及びそれを用いた塗装方法
【課題】塗装用ロボットの数が少なくても所望の塗装を行うことができ、しかも塗装室を小型にすることができる塗装設備を提供すること。
【解決手段】本発明の塗装設備1は、塗装室2、ワーク揺動手段21、塗装機31、塗装用ロボット41等を備える。塗装室2には、ワーク支持体11により支持されたワークWが搬入される。ワーク揺動手段21は塗装室2に設置されている。ワーク揺動手段21は、塗装室2内に搬入されたワークWを、中心軸線C1を揺動中心としてワーク支持体11とともに揺動させる。塗装用ロボット41は、ロボットアーム42の先端に塗装機31を搭載している。塗装機31は揺動するワークWに対して塗料を吹き付ける。
(もっと読む)
タイヤ用液体塗布機
【課題】タイヤのビード部に石鹸水等の液体を適切に自動塗布する。
【解決手段】第1サーボモータ4によってタイヤ70の軸線Sと同軸上で回転可能な回転板7と、その回転板7の前方でタイヤ70の半径方向へ移動可能な移動ユニット14とを備え、移動ユニット14に、スプレーノズル46,55を備えた第1バー40及び第2バー49を前後方向へ移動可能に設けて、移動ユニット14の移動と第1、第2バー40,49の移動とによりスプレーノズル46,55をタイヤ70のビード部71,72に対向させ、回転板7と共に移動ユニット14を回転させることで、ビード部71,72の全周に亘って石鹸水を塗布可能とした。
(もっと読む)
塗装システム
【課題】 ロボット装置に取付けられた塗装機の共通本体部に対して霧化ヘッド、カートリッジを交換するときに、共通本体部を交換位置に位置決めする。
【解決手段】 ロボット装置13に塗装機14の共通本体部15を取付ける。また、共通本体部把持装置33を霧化ヘッド交換洗浄装置31の固定板32に固定して取付け、共通本体部把持装置33により共通本体部15を把持して位置決めする構成とした。また、共通本体部把持装置33が共通本体部15を把持するときには、ロボット装置13の駆動力を低減し、外力を加えれば共通本体部15を自由に動かすことができるようにする。これにより、共通本体部把持装置33は、ロボット装置13の駆動力に抗して共通本体部15を交換位置Oに正確に位置決めすることができる。
(もっと読む)
光触媒噴射施工装置システム
【課題】従来、主な産業製品及び部品に対する光触媒施工は媒体本体に練り込むか、又は製品完成後に別途施工業者に依頼して手または加湿機状の装置で施工するのが主であったが両者も均一ロットまたは大量需要に対しての対応は可能であったがスポット受注の対応には時間と費用と大量の受注ロットが必要で、現状およびインク媒体素材に練りこむ製法は特性上最表面にて紫外線により反応する光触媒の作用自体も最大限に発揮する事が不可能であったが今回の装置を装着した産業製造機器を使用して媒体を製造する事により製品完成と同時に最表面に光触媒を噴霧できる事が可能となり多種多様な製造媒体ならびに小ロットの製造媒体にも光触媒を施工する事が可能となる。
【解決手段】 製造媒体の製造及び搬送ライン上に微粒化可能な光触媒噴射ノズルを可動式の取付装置を配した光触媒噴射ユニットを取付ける事により製品製造完了または製造過程において同一ライン上で光触媒の最表面施工を可能にする事ができる。
(もっと読む)
作業補助装置
【課題】 予め目標軌道を記憶させずとも対象物を目標軌道に追従させやすいように操作子の操作反力を制御する。
【解決手段】 作業補助装置10の移動機構11は塗布器具30と操作子18を有している。操作子18は、移動機構11によって移動させる基準点Pの移動位置を指示するために、作業者が並進操作と回転操作を加えることができる。コントローラ22は、操作子18に固定されている基準線(x軸)の方向と並進操作方向のなす角が大きいほど、並進操作に対して大きな操作反力を操作子18に付与するように移動機構11のアクチュエータ群16を制御する。また回転操作に応じて塗布器具30に固定された基準点Pを中心として塗布器具30を回転させる。これにより塗布器具30のx軸方向を目標軌道Lの方向に一致させつつ、基準点Pを目標軌道Lに沿って移動させることが容易になる。
(もっと読む)
1 - 20 / 30
[ Back to top ]