
Fターム[5C054HA26]の内容
閉回路テレビジョンシステム (47,623) | 用途 (7,416) | 運輸 (2,418)
Fターム[5C054HA26]の下位に属するFターム
乗客サービス (9)
ナビゲーションシステム (62)
無人走行車 (8)
車両周囲、死角の監視 (2,123)
Fターム[5C054HA26]に分類される特許
21 - 40 / 216
車両周辺監視装置
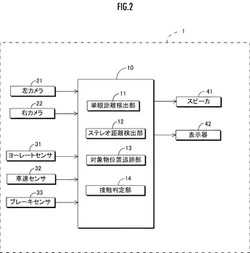
【課題】ステレオカメラにより距離を検出するための演算量を低減して、対象物の距離を精度良く検出することができる車両周辺監視装置を提供する。
【解決手段】車両1に搭載された左カメラ21,右カメラ22により撮像された同一対象物の画像部分の視差に基づいて、車両1と対象物との距離を検出するステレオ距離検出部12と、左カメラ21又は右カメラ22の撮像画像における対象物の画像部分の位置が、車両1からの距離が所定距離以下である範囲を想定して設定された特定画像領域内であるときに限定して、ステレオ距離検出部12により車両1と対象物間の距離を検出して、対象物の位置を追跡する対象物位置追跡部13とを備える。
(もっと読む)
車内非常通報装置

【課題】新規に敷設する必要がなく、低コストで、かつ配線するスペースを必要とせず、映像伝送に必要な伝送周波数帯域の映像信号を十分伝送可能で、音声以外の通信者側の情報を入手可能とし、非常通報に対しより詳細に対応することが可能な車内非常通報装置を提供する。
【解決手段】非常通報ボタンの近傍に、非常通報ボタンを押す人(乗客若しくは乗務員)の顔が映るようカメラを設置する。カメラが撮像した映像は、PLC装置を介して列車の低圧電力線に送信される。乗務員側では、通報者の映像を映し出すための表示モニタを設置し低圧電力線より非常通報ボタンに連動して映像出力オンし、ボタンが押された場所に設置されているネットワーク映像を表示モニタに選択出力するように動作する。
(もっと読む)
運転支援装置
【課題】車両の所定位置に固定された撮像手段により車両周囲を撮像した画像を使用して、運転者にとってより使用感の良い運転支援画像を表示する運転支援装置を提供する。
【解決手段】画像処理手段は、車両40の後部に設置された撮像手段1で撮像した車両後方周囲画像から車両40後方に対応する領域を切り出しこれから後方画像を生成するとともに、車両40後方の左右範囲に対応する領域とを各々切り出しこれらから右後方周囲画像と左後方周囲画像とを生成する。そして、後方画像を表示手段の下部に表示するとともに、右後方周囲画像と左後方周囲画像とを表示手段の上部に並べて表示する。その際、右後方周囲画像は表示手段の中央部から右側部へ向かうに従って表示領域が上下に広く表示されるよう生成されるとともに、左後方周囲画像は表示手段の中央部から左側部へ向かうに従って表示領域が上下に広く表示されるよう生成される。
(もっと読む)
車両用表示システム
【課題】異なるディスプレイ間を跨いで滑らかに移動していく可動画像により、ディスプレイ間を連携させて情報の移動を知らせるための表現が可能で、安価な車両用表示システムを提供する。
【解決手段】車両の情報を表示するメータディスプレイ4が設けられたメータ表示装置と、上記情報以外の車両の情報を運転者に表示するナビゲーションディスプレイ6を有するナビゲーション表示装置とを備え、複数の画素領域に分割可能で、上記画素領域間を跨いで移動していく可動画像を含む画像情報を生成するグラフィックディスプレイ制御部2と、該グラフィックディスプレイ制御部2を制御する制御ユニット部1と、上記画像情報を画素領域ごとに、メータディスプレイ4とナビゲーションディスプレイ6とに分配する分配器3とを備える。ヘッドアップディスプレイ5に分配してもよい。
(もっと読む)
車両周囲画像撮像システム
【課題】車両周囲画像撮像システムにおいて、高性能な演算処理装置を必要とせず、かつ適正に周囲画像を補正する。
【解決手段】カメラ傾斜角センサ20(第1の検出器)によって検出されたカメラ10の傾き角度αiと車両傾斜角センサ40(第2の検出器)によって検出された車両200の傾き角度βとの差γi(傾き角度差分値)が、予め設定された基準値Γi(初期値や設計値等)から変化したときは、その変化量Δγi(ずれ量)に応じて俯瞰画像(周囲画像)の補正を行うものであり、差γiを算出する演算処理は軽負荷であるため高性能な演算処理装置を必要とせず、また、カメラ10の傾き角度αiの変化のみに応じて俯瞰画像の補正を行うのではなく、車両200の傾き角度βとの相対的な関係γiの変化に応じて補正を行うため、適正に俯瞰画像を補正する。
(もっと読む)
歩行者用周辺監視装置
【課題】本発明は、歩行者が、接近する歩行者周辺の物体と衝突するのを未然に防げる歩行者用周辺監視装置を提供する。
【解決手段】本発明は、歩行者に着脱可能に装着され、当該歩行者を中心とした歩行者周辺を撮影するカメラ10と、カメラで撮影した画像から、歩行者周辺から歩行者へ接近する物体を検出する接近物体検出手段11と、カメラで撮影した画像から、歩行者へ接近する物体が歩行者と衝突する危険度を判定する危険度判定手段11と、判定された危険度が高いとき、歩行者に物体が接近している旨を知らせる報知手段4,11と具備して構成した。同構成により、歩行者に接近する物体が、歩行者に対し衝突する危険があると、歩行者にその旨が報知されるから、歩行者は、同報知をうけて、接近物体との衝突を避ける行動を行えば、未然に衝突が避けられる。
(もっと読む)
接近物検知装置および接近物検知方法
【課題】接近物であるか否かの判定を迅速に行うことができ、静止物が接近物であるとの誤判定を低減して、接近物警報システムに適用する際の静止物を対象とした誤警報の出力を低減することができる「接近物検知装置および接近物検知方法」を提供すること。
【解決手段】接近物候補検出手段4によって立体物の最新の検出結果が取得される毎に、最新の検出結果に示される立体物の重心を算出する重心算出手段5と、前記重心の算出結果に基づいて、前記重心の移動方向を算出する移動方向算出手段6とを備え、接近物判定手段7は、前記重心の移動方向が、移動体への接近を示す方向である場合には、接近物であると判定し、前記重心の移動方向が、移動体からの離間を示す方向である場合には、接近物でないと判定すること。
(もっと読む)
作業車両の周辺監視装置
【課題】車体と車体周辺の物体との位置関係をカメラ画像上で容易に判断可能な周辺監視装置を提供する。
【解決手段】周辺監視装置10は、カメラ画像と、カメラ画像上の地面に垂直投影される車体(ベッセル4を含む)の外縁を示す車体外縁線BLと、をモニタ30に表示させる表示制御部40を備える。
(もっと読む)
作業車両の周辺監視装置
【課題】不要な警告を抑制可能な周辺監視装置を提供する。
【解決手段】周辺監視装置10は、警告領域設定部120と警告部140とを備える。警告領域設定部120は、ダンプトラック1の走行状態に応じて、障害物の存在を運転者に警告する必要のある警告領域を設定する。警告部140は、8台のレーダ装置21〜28のうち少なくとも1つのレーダ装置によって検知された障害物の相対位置が警告領域内に位置することを運転者に警告する。
(もっと読む)
作業車両の周辺監視装置
【課題】俯瞰画像において作業車両の近くに位置する物体を容易に認識することができる作業車両の周辺監視装置を提供する。
【解決手段】作業車両の周辺監視装置において、第1撮像部は、作業車両の周囲の第1領域を撮像して第1画像データを得る。俯瞰画像作成部は、第1画像データを所定の仮想投影面31に投影することにより、作業車両の周囲の俯瞰画像を作成する。仮想投影面31は、作業車両に近づくほど地面からの高さが高くなる形状を含む。
(もっと読む)
車両用周囲監視装置
【課題】ガイド線の作成作業に際して、ガイド線パラメータデータの入力が容易になると共に、入力ミスを防ぐことができる車両用周囲監視装置を提供する。
【解決手段】本発明の車両用周囲監視装置1は、車両Vに取付けられ、その車両Vの周囲を撮像する撮像素子12と、撮像素子12により撮像された車両Vの周囲の実画像を表示するディスプレイ21と、車両Vからの距離を示すガイド線を生成するガイド線描画手段24とを備え、ガイド線描画手段24で生成したガイド線を実画像に重ね合せてディスプレイ21に表示させる構成を有する。ガイド線描画手段24は、ガイド線パラメータデータを入力することでガイド線を生成し、このガイド線パラメータデータは撮像素子12を介して外部から入力される。
(もっと読む)
車載情報システム、及びその制御方法
【課題】異常事態発生時において、異常事態の記録情報を複製し、複製された記録情報を車外へ容易に持ち出し可能な車載情報システムを提供する。
【解決手段】本発明に係る車載情報システム1F00は、システム制御部1000と、データバッファ部1200と、車両の操縦情報、車両の運動状態、及び車両の位置情報の少なくとも1つと、車両の前方及び後方の少なくとも一方の映像を含む映像情報とを含む運転情報を取得し、データバッファ部1200に記録する運転情報取得部1350と、映像情報を所定のビットレートでエンコードするビデオエンコード部1300と、映像及び音声のうち少なくとも一方を含むAV情報を再生するAV処理部1100とを備え、システム制御部は、ビデオエンコード部によってエンコードされ、データバッファ部に記録された運転情報の少なくとも一部をAV処理部にメディアへ記録させる。
(もっと読む)
周辺監視装置
【課題】距離感や速度感に対する違和感を抑制することができる周辺監視装置を提供することを課題とする。
【解決手段】周辺監視装置1は、車両の周辺をカメラ22により撮像し、撮像された画像を運転者に提示する表示部21と、表示部21を使用時の前記運転者による前記運転操作の操作タイミングとを取得する電子ミラータイミング取得部32と、操作タイミングに応じて表示部21により運転者に提示される画像を補正する比較部34とを備える。
(もっと読む)
画像表示システム、画像生成装置及び画像生成方法
【課題】シフト位置が後退位置にあるときに周辺画像及び前方撮影画像が表示画面に表示された場合でもシフト位置が後退位置であることを運転者が容易に判断することができる画像表示システム、画像生成装置及び画像生成方法を提供する。
【解決手段】画像表示システム120は、撮影画像に基づいて車両及び車両の周囲を仮想視点から見た様子を示す合成画像を生成する合成画像生成部34と、合成画像を表示画面に表示するナビゲーション装置20と、合成画像にガイド線を付加するガイド線付加部37と、車両が停止状態でシフト位置が後退位置にある場合に、合成画像へのガイド線の付加を禁止するガイド線処理部38と、を備える。
(もっと読む)
車載カメラシステム
【課題】国際標準であるテスタ接続信号OBD−IIを使用して、保守点検等を行うために必要な画像のデータを送信することができる車載カメラシステムを提供する。
【解決手段】画像を撮像する撮像手段と、ODB−II接続線を用いて、テスト装置との間で情報通信を行う通信手段と、撮像手段により撮像された画像を所定画素数の区画分割を行い、分割された区画の画像毎に画像圧縮を行い、画像圧縮された区画の画像を通信手段を介してテスト装置へ送信する画像圧縮手段とを備えた。
(もっと読む)
画像認識表示システム及びこれに用いるカメラ
【課題】伝送路の使用帯域幅を削減しつつ高精度の画像認識を行う画像認識表示システムを提供すること。
【解決手段】カメラ1は、画像表示に用いる表示画像信号を生成する表示画像信号処理回路13と、画像認識に用いる認識用画像信号を生成する認識用画像信号処理回路14と、表示画像信号と認識用画像信号の差分信号を生成する差分回路15とを備え、表示画像信号と差分信号を伝送路2へ送出する。画像認識処理装置3は、伝送路2を介して受信した表示画像信号と差分信号を加算して認識用画像信号を復元する加算回路32と、認識用画像信号を用いて特定の被写体の認識処理を行う画像認識処理回路33と、表示画像信号と認識処理の結果を合成して表示装置4へ出力する表示処理回路34とを備える。
(もっと読む)
トンネル壁面の展開画像取得システム
【課題】トンネル壁面の展開画像を取得するシステムについて、得られた立体視可能な展開画像が現実の壁面の状態を正確に反映できるようにし、その反映の度合いを簡単に判定できるようにする。
【解決手段】システム10は、トンネルを走行する車両11と、車両11に搭載されたビデオカメラ12と、各ビデオカメラ12が撮像した画像データを処理可能な画像処理部13とからなる。画像処理部13は、画像データの各コマ上の第1および第2ラインから短冊形の第1および第2視差画像をサンプリングし、両ラインの中間から短冊形の直視画像をサンプリングする。各画像を横方向に配列してカメラ12ごとに第1および第2視差連続画像、直視連続画像を合成する。各連続画像を縦方向に配列して、第1および第2視差展開画像、直視展開画像を合成する。第1および第2視差展開画像を赤または青の着色画像として出力して立体視可能とする。これとフルカラー画像として出力した直視展開画像を比較可能とする。
(もっと読む)
通信制御装置及び車載システム
【課題】車載システムにおいて、無線通信帯域の変化や車両状態の変化に対応させて柔軟に無線通信帯域の割り当てを変更する。
【解決手段】通信制御装置110は、車両の状態と無線通信帯域のレベルの組合せごとに、各データ送信装置に割り当てる無線通信帯域の割り当て比率が示されるテーブルを保持し、電子制御装置150から入力される車両の走行情報に基づき車両の走行状態を判定し、判定した走行状態と、無線通信装置111から通知される車載システム全体の実効帯域とに基づいてテーブルを参照し、データ送信装置ごとに、割り当てる無線通信帯域を決定し、各データ送信装置に、決定した無線通信帯域を通知する。これにより、無線通信帯域の変化や車両状態の変化に対応させて柔軟に通信帯域の割り当てを変更させることができる。
(もっと読む)
移動体画像追尾装置
【課題】付加センサを追加せず、追尾性能の劣化を改善する。
【解決手段】実施形態の移動体画像追尾装置は、駆動部、カメラセンサ、追尾誤差検出部、角度センサ、角速度センサ、第1計算部、第2計算部、補正追尾誤差検出部、生成部、および制御部を含む。追尾誤差検出部は、画像データから、移動体の視野中心からのずれ量である追尾誤差を検出する。第1計算部は、追尾誤差と角度とを用いて、移動体の位置ベクトルと速度ベクトルを計算する。第2計算部は、角度からカメラセンサの視軸ベクトルを計算する。補正追尾誤差検出部は、視軸ベクトルと位置ベクトルとの関係および速度ベクトルから、追尾誤差検出値が一定であるサンプリング期間よりも短い期間ごとに補正追尾誤差を計算する。生成部は、補正追尾誤差を使用して移動体を追尾するように駆動部を駆動する角速度指令値を生成する。制御部は、角速度指令値と角速度との差がなくなるように駆動部を制御する。
(もっと読む)
画像記録装置及びドライブレコーダシステム
【課題】記録された画像ファイルのサムネイルの表示を高速化できる情報を記録する画像記録装置を提供する。
【解決手段】画像情報取得手段12は、複数の静止画像情報を時系列順に取得し、画像情報記録手段170が複数の静止画像情報を画像情報として記録手段30に記録するときに、画像情報から各々の静止画像情報を特定するための特定情報50を記録手段30に記録する特定情報記録手段100を備える。
(もっと読む)
21 - 40 / 216
[ Back to top ]