
Fターム[5H180AA01]の内容
Fターム[5H180AA01]の下位に属するFターム
大形車両 (44)
中・小型、普通車 (33)
二・三輪車、オートバイ、車椅子 (177)
バス (168)
トラック、ミキサ車等の作業車両 (146)
緊急車両(パトカー、消防車等) (52)
危険物運搬用車両 (3)
タクシー、ハイヤ、送迎車 (205)
巡回車、集・配送車 (114)
時刻表により運行される車両、路線バス (140)
レース(競技)用の車両 (3)
その他の車両 (41)
Fターム[5H180AA01]に分類される特許
1,801 - 1,820 / 12,590
最新運転者支援システムのための幾何学形状の作成
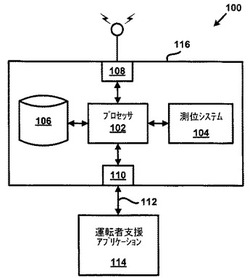
【課題】最新運転者支援システム(ADAS)、特に、ADASにおける使用に向けて幾何学形状を作成する技術を提供する。
【解決手段】ADASのための幾何学形状を作成する方法及びシステムを説明する。セグメントのシーケンスであるリンクチェーンが作成される。リンクチェーンは、2Dスプラインを作成するために用いられる。リンクチェーン、2Dスプライン、及び高度データを用いて3Dスプラインが作成される。3Dスプライン及び恐らく2Dスプラインも、2Dポリラインを作成するのに用いることができるベジエ曲線に変換される。ADASアプリケーションは、ベジエ曲線及び2Dポリラインを用いてADAS機能を提供することができる。
(もっと読む)
情報処理装置

【課題】車両のナビゲーションを行う情報処理装置において、ユーザの要求に可及的に応じた情報提供を行う。
【解決手段】車両に搭載され、該車両のユーザに情報を表示するための表示装置を介して該車両のナビゲーション情報を提供するとともに、複数種類の放送波に対応した複数の受信アンテナを介して該車両で受信された放送情報をユーザに提供する情報処理装置であって、複数の受信アンテナは情報処理装置に接続される。そして、該情報処理装置は、ナビゲーション情報とともに受信アンテナを介して受信された放送情報をユーザに提供する情報提供モードの切替要求があると、情報処理装置で採用される情報提供モードを、現在の一の情報提供モードとは異なる他の情報提供モードに切り替えて、ナビゲーション情報とともに提供される放送情報の種類を変更する。
(もっと読む)
車々間無線通信装置及び車々間通信方法
【課題】 周辺車両が多数存在していても車群間通信における通信トラフィック量の増大を防止して走行の際に必要なサービスを運転者に十分に提供することができる車々間無線通信装置及び車々間通信方法を提供する。
【解決手段】 転送先を自車としたフレームを受信したとき自車がマスタ車両であるか否かを判定し、フレーム中の送信元車両の自車に対する相対位置を検出し、自車がマスタ車両であって相対位置が予め定められた転送条件に合致するときフレームを車群に属しない周辺車両に転送する。
(もっと読む)
受信機及び受信方法並びに処理装置
【課題】複数の送信機から順次送信されてくる信号間に大きな信号レベル差があっても、確実にこれらを受信することができる受信機及び受信方法並びに処理装置を提供する。
【解決手段】本発明の受信機、受信方法又は処理装置は、送信機から送信された無線信号を信号レベルに応じてゲインを変化させて受信することを前提として、同一の送信機から送信された無線信号(フレーム)を継続して受信中か又は受信が終了したかを判定し、終了したと判定した場合には、他の送信機から送信される次の無線信号の受信を待たずにゲインを変化させるものである。受信終了のタイミングでゲインを変化させることができれば、次の無線信号を十分なゲインで待ち受けることができる。
(もっと読む)
映像表示性能評価装置、映像表示性能評価方法、および映像表示性能評価プログラム
【課題】従来よりも正確な映像評価を行うことができる映像評価に関する技術を提供する。
【解決手段】映像を表示する映像表示システムの映像信号の表示性能を評価するための映像表示性能評価装置であって、前記画面に表示する映像データを格納する記憶部と、前記記憶部に格納されている映像データを抽出して映像信号として出力する映像信号生成部と、前記映像信号生成部で生成された映像信号に含まれる映像データを表示する画面を含む表示部と、を備える。そして、前記記憶部は、前記画像データとして、前記映像信号に基づいて前記画面に正しく映像が表示されるか否かを判断するためのテストパターンを格納し、前記映像信号生成部は、前記記憶部に格納されているテストパターンを抽出してテストパターン映像信号として出力する。
(もっと読む)
車載器、路側器、及び情報配信システム
【課題】インフラの設置コストや運用コストを低下させつつ、路側器に配信情報を適切に配信することができる車載器、路側器、及び情報配信システムを提供する。
【解決手段】車載器12が、路側器14に対して配信する配信情報を取得し、自車両を基準とした所定範囲内の領域に存在する路側器14に対して、取得した配信情報を無線通信によって配信するように制御する。
(もっと読む)
車両
【課題】横追従走行において障害物を有効に回避して追従走行を継続する。
【解決手段】横追従時に、走行を継続した場合の衝突を検知するとブレーキを発動して一旦停止する。その後た障害物との距離と比較し、横追従の車間距離分を移動するのに必要な障害物間の距離を確保するまで進行方向と180°反対の方向へバックさせる。横移動に必要な障害物間の距離を確保した後、処理を縦追従に切り替え、縦追従の車間距離に追従車両の最小旋回半径と追従車両のベクトルで先行車中心から引いた直線の交点を目標点として設定する。縦追従処理開始後は、車間距離を定義された縦車間距離になるまで徐々に車間距離を縮め縦追従に移行する。
(もっと読む)
車両用運転支援装置
【課題】小型且つ簡易な構成でありながら広域の情報を表示する。
【解決手段】光透過部材を通じて視認される実画像に重畳して情報を表示する情報表示部材32と、ドライバの頭部Hを監視するドライバ頭部監視手段18と、ドライバ頭部監視手段18からの信号に基づいてドライバの頭部の回転角度を検出する頭部回転角検出手段64と、ドライバの頭部Hの回転角度に対応して前記情報表示部材の位置を変位させる情報表示部材変位駆動手段40,50とを有する。好ましくは、周囲の危険対象物Oを検出する危険対象物検出手段60と、危険対象物が自車に衝突又は接触する危険度を判定する対象物危険度判定手段80と、危険度が所定の危険度よりも高いときに、情報表示部材32を危険対象物Oの方位に向けて変位させる表示移動処理手段S32とを有する。
(もっと読む)
操縦支援装置
【構成】レーザ照射器L_N(N:1〜4)は、自動車に設けられてレーザ光を斜め下方向に向けて放射する。カメラC_Nはそれぞれ、自動車に設けられてレーザ光L_Nの放射方向に対応する視野VW_Nを有する。CPUは、レーザ照射器L_Nによって放射されたレーザ光の反射位置の変化量が基準を上回るか否かを、カメラC_Nの出力に基づいて判別する。レーザ照射器L_Nの放射方向は、判別結果が否定的な結果から肯定的な結果に更新されたとき、CPUによって変更される。レーザ照射器L_Nによって放射されたレーザ光の反射位置の変化の態様は、放射方向の変更処理と並列するカメラC_Nの出力に基づいて、CPUによって検出される。CPUは、この検出結果に応じて異なる報知を自動車の運転手に向けて出力する。
【効果】処理量を抑えつつ、障害物の検知精度を確保することができる。
(もっと読む)
車両逸脱防止装置
【課題】車線の認識が困難な場合であっても適切な車両逸脱防止制御を行える車両逸脱防止装置を提供する。
【解決手段】自車両OVと先行車LVの位置関係に基づきドライバに逸脱防止警報を行う車両逸脱防止装置を、先行車を含む自車両前方の環境を認識する環境認識手段110と、環境認識手段を用いて自車両と先行車との位置関係を演算する先行車位置演算手段120と、自車両と先行車の位置関係に基づいて先行車の走行軌跡に沿って自車両を進行させるのに必要な目標操舵量を演算する目標操舵量演算手段130と、自車両の実操舵量を検出する実操舵量検出手段150と、目標操舵量と実操舵量との偏差Δeが所定の閾値Δe_th以上となった際に、逸脱防止警報を行う警報制御手段160、170とを備える構成とする。
(もっと読む)
車両の発進検出装置及びそれを備えた運転支援装置
【課題】車両の発進を早期に精度良く検出することができる車両の発進検出装置及びそれを備えた運転支援装置の提供。
【解決手段】交差点検出手段1と、接近車両検出手段2と、発進検出装置3と、警報手段4とを備え、発進検出装置3は、自車両が所定速度以下の場合に、自車両のブレーキ操作量を検出するブレーキ操作量検出手段31と、ブレーキ操作量の周波数解析を行う周波数解析手段32と、自車両のアクセル操作量を検出するアクセル操作量検出手段33と、ブレーキ操作量の時間変化の周波数解析結果における所定の周波数の成分の信号強度が所定の基準強度以上となった時点からの自車両の積算移動距離が所定の基準距離を超えた場合において、アクセル操作が開始されたときに、自車両の発進と判定する発進判定手段34とを備える。
(もっと読む)
パネル装置
【課題】カーナビゲーション装置10では、表示パネル11が、上端部のローラ18をサブパネル12の案内溝20に挿入して、上下方向へ案内されるとともに、下端部において左右のスライダ24の前後方向変位に伴い前後方向変位して、サブパネル12を閉鎖する起立位置と開放するほぼ水平位置とに切替自在になっている。ローラ18と案内溝20との間のがたによる異音を防止する。
【解決手段】レバー31はサブパネル12の後面の張出し部30に揺動自在に結合する。長孔26は、スライダ24に穿設され、レバー31の下端の突出軸部40を挿通される。スライダ24が後端位置になって、表示パネル11が起立位置にあるときは、長孔26の前端が突出軸部40を後方へ連行し、これによりレバー31は揺動し、レバー31の上端部分の前端部の丸棒部54は、表示パネル11の通孔52へ嵌合して、通孔52との間のがたを除去する。
(もっと読む)
車両の運転支援装置
【課題】距離計測装置の性能低下を簡単な手順で判定できる車両の運転支援装置を提供する。
【解決手段】所定計測回数内に計測された全ての距離データから最大の計測距離となる最大計測距離を求め(S2〜S5)、求めた最大計測距離から制御車間距離を減算して、車間余裕距離を求め(S6)、求めた車間余裕距離が予め設定した判定値以下の場合には、性能低下有りと判断して、当該性能低下の情報を運転者に伝達する(S7、S10、S11)。
(もっと読む)
車両の速度制御装置
【課題】連続する2つのカーブを通過する際において運転者の感覚に合致した違和感の少ない速度制御を達成できる車両の速度制御装置を提供すること。
【解決手段】連続カーブ車速制御において、目標車速特性Vtoが、第1カーブの目標特性Vto1、カーブ間の目標特性Vtoz、第2カーブの目標特性Vto2が順に繋げられて構成される。第1、第2カーブの目標特性Vto*は、地点Pcr*まで減少して地点Pcr*にて適性車速Vqo*となり、その後、地点Pca*までVqo*に維持され、その後、地点Pca*から増大する特性a*−b*−c*−d*に決定される。カーブ間に対する制限車速Vqolが、適正車速Vqo*のうち大きい方にカーブ間距離に基づいて演算される増分Vupが加算されて演算される。このVqolに基づいてカーブ間の目標特性Vtozが特性X-Yに決定される。車速が目標車速特性Vtoに基づいて調整される。
(もっと読む)
駐車支援装置
【課題】精度の高い駐車区画検知機能を有するとともに、ドライバにとって利便性の高い駐車支援装置を実現する。
【解決手段】第一の距離測定センサ1の出力情報と自車両位置演算手段2の演算結果とに基づいて隣接車両の存在領域を特定し、駐車可能区画の形状と自車両に対する相対的な位置ならびに傾きを演算する駐車区画検知手段3を備えると共に、シフトポジション検知手段71と、第二の距離測定センサ4の出力情報に基づく障害物接近判定手段5の判定結果を補正する障害物接近判定補正手段72を備え、障害物接近判定補正手段72では、車両のシフトポジションと、駐車区画検知手段3にて演算される駐車可能区画の形状と自車両に対する相対的な位置ならびに傾きに基づき、自車両がこのまま進行しても周辺の障害物と接触しないと判定した場合は、障害物接近判定手段5での判定結果を補正し、警報発生手段6による警報発生を抑制する。
(もっと読む)
ナビゲーション装置
【課題】所望の2地点間を往復する際に、往路の経路探索において指定した出発地を復路の目的地とする場合に、復路の目的地を適切に設定できるようにする。
【解決手段】ナビゲーション装置1は、禁止領域設定手段15と、位置判別手段17と、復路目的地決定手段20と、を備え、往路の経路案内において、禁止領域設定手段15は、所望地点を中心とした所定の領域を、経路案内を禁止する領域として設定し、位置判別手段17は車両の位置を判別し、前記禁止領域内は案内経路に基づく音声ガイダンスなどの経路案内を禁止し、設定した領域を出て、現在位置が案内経路上に位置した地点から案内経路に基づく経路案内を受けられるようにするとともに、往路の目的地を出発地とし、往路の出発地までの復路の経路探索においては、前記復路目的地決定手段19は前記マッチングされた地点を復路の目的地とする。
(もっと読む)
ナビゲーション装置、及びナビゲーション方法
【課題】
ナビゲーション装置の操作に慣れていないユーザーや機械操作を苦手とするユーザーにとっては、最初の検索の後に異なる検索条件を付加して更なる絞込みを行なう操作は困難であった。また、「ジャンル検索」や「住所検索」を行なう際にナビゲーション装置または車両の現在位置に近い住所地を優先的に表示画面の最上位に表示しても目的地がその住所地に該当しない場合は、改めて50音順で表示された住所地の中から目的地の位置する住所を探さなければならない手間があった。
【解決手段】
現在位置を含むエリア項目と前記現在位置から距離が近い他のエリア項目とを表示させる表示制御手段と、前記表示制御手段により表示されている複数のエリア項目の中から指定されたエリア項目内にある目的地候補を検索する目的地候補検索手段と、前記目的地候補検索手段で検索された検索結果を表示する検索結果表示手段と、
を有することを特徴とするナビゲーション装置。
(もっと読む)
経路探索装置、情報提示方法、およびコンピュータプログラム
【課題】ユーザが所定の経路を移動した場合や所定の条件下で経路探索を行った場合に、潜在的に享受しうる利益をユーザに示す。
【解決手段】(a)GPSシステムでユーザの位置の情報を取得して、過去の時点におけるユーザの位置の情報を含む位置履歴情報を生成する(S10)。(b)経路ネットワークデータを参照しつつ、起点から終点までユーザが移動した基準移動方法を、経路ネットワークデータに基づいて決定する(S20,S30)。(c)基準移動方法にしたがって移動するのに要する費用である基準コストを計算する(S40)。(d)基準移動方法の移動態様とは異なる移動態様で起点から終点に移動するための代替移動方法にしたがって移動するのに要する費用である代替コストを計算する(S60)。(e)基準コストと代替コストから得られる情報を出力する(S90)。
(もっと読む)
ナビゲーション装置、ナビゲーション方法、およびナビゲーションプログラム
【課題】簡易な操作で訪問先を記録し、搭乗者の利便性を高める。
【解決手段】ナビゲーション装置100の代表的な構成は、車両が任意の位置に停車してからの経過時間が所定時間以上であった場合に停車状態であると判断する停車判断部250と、停車判断部が停車状態であると判断した場合、停車した位置の位置情報に基づいて、現在位置から所定範囲内に存在するエリアデータから、搭乗者の1または複数の訪問先候補を導出する訪問先候補導出部252と、搭乗者の入力に応じて、1または複数の訪問先候補から搭乗者が訪問した訪問先を特定する訪問先特定部254と、特定した訪問先のエリアデータに関連付けて、訪問したことを示す訪問情報を訪問情報記憶部236に記憶させる制御部としての中央制御部208とを備える。
(もっと読む)
カーナビゲーション装置およびカーナビゲーションシステムならびにカーナビゲーションシステムにおける通信方法
【課題】ユーザにとって利用料金の負担が大きくなることがなく、かつ移動通信システム側から見ても、無線リソースを効率的に使用でき、さらにはカーナビゲーションサービスを利用中に圏外に出たためにサービスが中断してしまうことがないようにする。
【解決手段】地図管理サーバとカーナビゲーション装置の間を、第1の無線通信ネットワークおよび第1の無線通信ネットワークより大容量の通信が可能な第2の無線通信ネットワークを介して接続し、カーナビゲーション装置と、地図管理サーバとの間で通信を行なう際、制御情報の送受信は第1の無線通信ネットワークを介して行い、地図情報のダウンロードは第2のネットワークを介して行なう。
(もっと読む)
1,801 - 1,820 / 12,590
[ Back to top ]