
Fターム[5J062FF05]の内容
Fターム[5J062FF05]に分類される特許
41 - 60 / 122
ハンドヘルド測地デバイスによるグラフィクス支援遠隔位置測定
【課題】付加的な設置機器を使用せずに、位置を計測することが可能である測地デバイスを提供すること。
【解決手段】関心のある地点の位置を決定する装置であって、複数の衛星からの位置データを受信する少なくとも1つのアンテナと、該少なくとも1つのアンテナに結合される少なくとも1つの受信機と、画像データを獲得する画像化回路であって、該画像化回路は、光学センサと光軸とを含む、画像化回路と、配向データを獲得する配向回路と、該画像データおよび該配向データの表現を表示して、該装置を位置決定する際に使用者を支援するディスプレイと、該位置データ、該画像データおよび該配向データに少なくとも基づいて、該関心のある地点の該位置を決定する位置決定回路とを含む、装置。
(もっと読む)
リアルタイム測位システムにおけるデータベースの負荷低減方法
【課題】リアルタイム測位システムにおけるデータベースの負荷を低減する。
【解決手段】
携帯装置を測位するよう動作可能な測位システムおよび方法は、無線信号を送信するよう動作可能な携帯装置を備える。無線ネットワークが、無線信号を受信し、携帯装置の位置を推定するために使用されるデータを報告するために使用される。測位サーバーが、無線ネットワークによって報告されたデータを無線ネットワークによって処理するために使用される。測位サーバーは、携帯装置に対して複数の測位レポートを生成する。前処理構成要素が測位サーバーと通信するよう動作可能である。測位サーバーによって生成された測位レポートは前処理構成要素に転送される。測位アプリケーションが、前処理構成要素と通信するよう動作可能であり、携帯装置に関する記録を保存するよう動作可能なデータベースとインタフェース接続する。前処理構成要素は、測位レポートを処理し、データ記録中のデータが規定された基準を満たす場合にのみデータ記録を保存する。 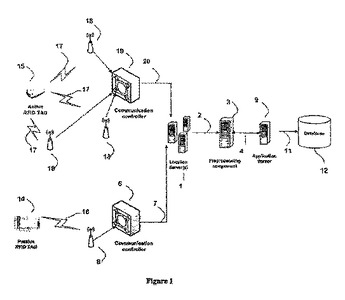 (もっと読む)
(もっと読む)
位置推定システム

【課題】マルチパスの影響を受けることなく、また赤外線投光部や赤外線受光部を設けることなく、高精度に移動体の現在位置を推定する。
【解決手段】位置推定対象エリア1を小区画に区切ったセルCL毎にタグ受信機3および人感センサ4を設ける。人Xに無線タグTGXを所持させ、人Yに無線タグTGYを所持させる。無線タグTGX,TGYは識別情報IDX,IDYが付された電波を発する。人感センサ4が検出するセルCL毎の人の在不在を示す情報を位置推定装置2へ送る。タグ受信機3で検出される識別情報が付された電波の強度を位置推定装置2へ送る。位置推定装置2は、人感センサ4が検出するセルCL毎の人の在不在の検出結果をマップA、タグ受信機3が検出するセルCL毎の同一の識別情報が付された電波の強度をマップB、マップAとマップBのセルCL毎のアンド情報をマップCとし、マップA,B,Cを用いて、位置推定対象エリア1に位置する人X,人Yの現在位置を推定する。
(もっと読む)
受信機の位置決定
開示される方法及びシステムを使用してユーザ装置の位置を決定する。ユーザ装置は、データ信号及び/又は搬送波信号を、周回している宇宙船から受信することができる。これらのデータ信号は、ユーザ装置の測位計算及び/又は追尾維持に使用することができる。開示される方法及びシステムは、ユーザ装置の時間バイアス及び周波数バイアスの問題を解決することができる。追尾維持を行なう場合、カルマンフィルタ状態推定器を拡張してユーザ装置の速度を推定することができる。 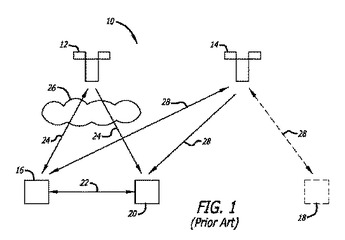 (もっと読む)
(もっと読む)
移動通信方法及び無線基地局
【課題】移動局UEの測位精度の改善を図る。
【解決手段】本発明に係る無線基地局eNBは、移動局UEとの間の上りリンクにおいて同期が確立されていない状態で、測定トリガを検出した場合に、移動局UEに対して、RAプリアンブル割当信号を送信するように構成されている下りデータ再開処理部12と、RAプリアンブル割当信号で割り当てられたRAプリアンブルの受信に応じて、上りリンクにおける伝搬遅延を算出するように構成されている伝播遅延算出部14とを具備する。
(もっと読む)
無線ネットワークにおいてノードのセットをロケーション特定するための方法
【課題】方法が、未知のロケーションを有するターゲットノードおよび既知のロケーションを有するアンカーノードのセットを含む無線ネットワーク内のノードのセットをロケーション特定する。
【解決手段】アンカーノードのセットはアンカーノードのサブセットに分割され、各サブセットは少なくとも3つのアンカーノードを有する。ターゲットノードから、各サブセット内のアンカーノードのそれぞれへの距離が測定され、ターゲットノードのとり得るロケーションが推定される。各推定されたロケーションに幾何学的制約を適用され、有効なロケーションが求められる。この有効なロケーションはフィルタリングされ、フィルタリングされたロケーションが求められる。フィルタリングされたロケーションが平均化され、ロケーションの初期推定値が求められる。
(もっと読む)
衛生状態監視管理システム及び方法
個人及び会社が自身の周囲環境の衛生状態を管理及び監視するためのリアルタイムロケーション特定システム(RTLS)衛生状態監視管理システム。本発明のいくつかの実施形態では、RTLSは、部屋及び表面の清潔度並びに清掃用品及び清掃職員のロケーションを監視及び管理するのに用いられる。本発明は、衛生サービスの改善された効率性及び品質を提供する。例えば、本発明は、清掃の優先順位付けを可能にすることができ、清掃用品及び清掃職員の効率的な使用を改善することができ、短期及び長期の清掃作業を追跡することができ、有効でない清掃に対して見識を提供することができる。 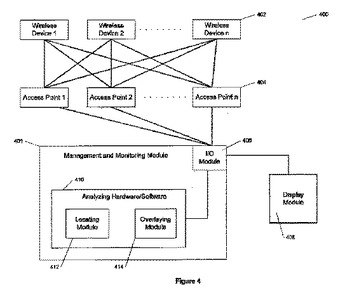 (もっと読む)
(もっと読む)
マルチオブジェクト測位システムおよび電力制御ベースの多重アクセス制御方法
【課題】既存のENとHNの問題を効果的に解決し、かつ信号の衝突を解決し、システムの時空間再使用性能を改善することが可能である多重アクセスコントロール方法を提供。
【解決手段】オブジェクトに取り付けられる複数のタグ装置とオブジェクトの位置決定のための1以上の測位装置を含む。タグ装置は、測位装置の状態情報を記録する測位装置リストを有する。タグ装置が、チャネル要求パケット(CRP)を間欠的に送信し、idle状態でかつCRPを受信した測位装置が、有効範囲内に、測位装置によって受信したCRPの送り主であるタグ装置にチャネルを割り当て、かつ他のタグ装置に測位装置の情報に通知するためのチャネル割当パケット(CAP)を送信し、CAPを受信したタグ装置が、CAPの内容に応じて記憶した前記測位装置リストを更新し、タグ装置が測位装置リストを参照してCRPの送信電力を調節する。
(もっと読む)
追従制御装置及び追従制御方法
【課題】追従性を向上した追従制御を課題とする。
【解決手段】車両1に設置した複数の無線通信手段Qでそれぞれ上記電波発信源8からの電波を受信して、各無線通信手段Qから電波発信源8までの各相対距離を取得する。取得した複数の相対距離から、車両1に対する電波発信源8の相対位置座標を取得する。無線通信手段Q毎に基準通信距離L内の検出設定エリアをそれぞれ想定し、その複数の検出設定エリア及びその検出設定エリアの重なりで区分される複数の存在判定エリアのうち、電波発信源8がどの存在判定エリアに位置するか上記取得した複数の相対距離から推定する。推定した存在判定エリアに基づき、目標位置取得手段3Bが取得した電波発信源8の相対位置座標の正当性を判定し、正当と判定した電波発信源8の相対位置座標に向けて車両1の移動を制御する。
(もっと読む)
移動体位置推定システムと移動体位置推定方法及び移動体位置推定プログラム
【課題】設置センサの位置情報を自動でキャリブレーションしつつ移動体の位置計測も合わせて行う。
【解決手段】測定領域内を移動する移動体Mの位置を推定するシステムにおいて、測定領域内に互いに分散して配置され、互い移動体Mまでの距離を3個以上の距離センサT1〜Tnで計測し、位置推定算出装置Pにて、距離センサそれぞれから任意の時刻のセンサ計測値を取得し蓄積し、取得蓄積された各距離センサのセンサ計測値に対して距離に応じた信頼性の度合いを示す距離信頼度を付与し、取得蓄積されたセンサ計測値のうち信頼度の高い計測値を採用して距離センサ及び移動体それぞれの位置を推定するようにし、位置推定の処理は、移動体Mの移動前後の位置それぞれの2個以上の距離センサから得られるセンサ計測値を用いて各距離センサの位置のキャリブレーション及び前記移動体の移動位置の推定を行う。
(もっと読む)
ワイヤレス通信ネットワークにおける測位のための到着時間(TOA)推定
ワイヤレス通信ネットワークにおいて信号の到着時間(TOA)を決定するための技法について説明する。各セルは、(i)システム帯域幅の中央部分の連続するサブキャリアのセット上の同期信号と、(ii)システム帯域幅上に分散した連続しないサブキャリアの様々なセット上の基準信号とを送信することができる。UEは、サブキャリアの様々なセット上で送信された複数の信号に基づいて、セルに関するTOAを判断することができる。UEは、様々な時間オフセットに関する第1の相関結果を取得するために、セルからの第1の信号(たとえば、同期信号)に関する相関を実行することができる。UEは、様々な時間オフセットに関する第2の相関結果を取得するために、セルからの第2の信号(たとえば、基準信号)に関する相関を実行することができる。UEは、第1の相関結果と第2の相関結果とを合成することができ、合成された相関結果に基づいてセルに関するTOAを判断することができる。  (もっと読む)
(もっと読む)
自転車用環境保護貢献度計測装置
【課題】エコポイントが不正に取得されるのを防止して正確なエコポイントを算出すること。
【解決手段】車輪回転数検出部100は自転車の車輪の回転を検出して対応する回転信号を出力する。移動距離・速度算出部102は前記回転信号とRAMに設定した車輪の周長データとに基づいて所定時間における自転車の移動距離を算出する。GPS受信部101はGPS位置情報を受信し、現在位置算出部103はGPS位置情報から現在位置を算出し、GPS距離・速度演算部104はGPS位置情報に基づいて所定時間における移動距離を算出する。エコポイント算出部107は、移動距離・速度算出部102が算出した移動距離とGPS距離・速度演算部104が算出した移動距離との差が所定範囲内のとき、移動距離・速度算出部102が算出した移動距離に対応するエコポイントを求めて累積のエコポイントを算出する。
(もっと読む)
調整されたラウンドトリップ時間測定を使用した無線位置決定
移動局の位置を無線で決定するための一方法は、複数の無線アクセスポイントへのラウンドトリップ時間(RTT)を測定する段階と、各無線アクセスポイントに関連するラウンドトリップ時間遅延および初期処理時間に基づいて各無線アクセスポイントへの第1距離を推定する段階と、補足的情報に基づいて各無線アクセスポイントへの第2距離を推定する段階と、各無線アクセスポイントへの第1距離推定と第2距離推定とを組み合わせる段階と、組み合わされた距離推定に基づいて位置を計算する段階とを含む。別の方法は、無線信号モデルに基づいて各無線アクセスポイントへの距離を測定する段階と、測定された距離に基づいて移動局の位置を計算する段階と、移動局の計算された位置に基づいて各無線アクセスポイントへの計算された距離を決定する段階と、無線信号モデルを更新する段階と、無線信号モデルが収束したかどうか決定する段階とを含む。  (もっと読む)
(もっと読む)
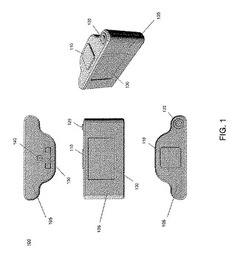
建造物内におけるロケーション決定システム及び方法
建造物内における電子機器(10)のロケーション決定の機能強化を図るために、ブリップ(blip)アクセスポイント(58a)を用いて、ロケーション支援情報を上記電子機器へ転送するシステム及び方法が記載される。このロケーション支援情報は(陸標などの)基準点として機能するダミーのビーコン(58)のマップを含むことができると共に、上記基準点から上記電子機器は、該電子機器のロケーションをマップ情報に対して相対的に決定することが可能となる。  (もっと読む)
(もっと読む)
3次元測位システム
【課題】単一の発信手段から発信される測定信号を単一の受信手段で受信することによって、高精度の3次元測位を可能とする。
【解決手段】単一の発信手段2において、アンテナ10a〜10dおよび10e〜10hを周期的に切替えながら、超音波信号あるいは高周波信号あるいは光信号に含まれた測定信号を放射し、単一の受信手段6によって受信する。前記受信手段6において、前記アンテナ10a〜10dおよび10e〜10hに対応して受信する測定信号から搬送波信号あるいは副搬送波信号を再生して位相差を測定し、前記発信手段2の複数組のアンテナからみた受信手段6の方向11および12の測定結果と、前記複数組のアンテナの間隔13とから、前記受信手段6の3次元の位置を高精度で測位する。
(もっと読む)
1またはそれより多くのパイロット信号を使用してモバイル機器が比較的静止したままであることを確認するための装置及び方法
モバイル機器に動作可能に結合されたトラッキング・ユニットが提供される。該トラッキング・ユニットは、該トラッキング・ユニットが比較的静止したままであることを決定するために、複数のGSM(登録商標)ネットワークのためにブロードキャスト・チャネルを使用し、複数のCDMAネットワークのためにパイロット・チャネルを使用することができる。該トラッキング・ユニットは、それが前に受信したほぼ同じ強度で同じ複数の無線周波数信号を受信していることを決定することにより、比較的静止したままであることを決定する。  (もっと読む)
(もっと読む)
移動端末、測位方法
【課題】GPS衛星を利用できない場合でも、測位を容易に行う。
【解決手段】位置が既知である移動通信基地局50Kと移動端末10との距離、位置が既知であるデジタル放送送信所50Sと移動端末10との距離、位置が既知であり、かつ、電波時計の時刻情報を送信する電波時計情報送信所50Tと移動端末10との距離、をそれぞれ算出し、それらを組合せて利用する。こうすることにより、GPSが全く利用できない場合でも移動端末10の位置を特定することができる。
(もっと読む)
電波による物体の検出装置および方法
【課題】宇宙由来の電波を利用して、天空に存在する物体を検出可能にする。
【解決手段】開示される電波による物体の検出装置においては、電波望遠鏡3によって、宇宙由来の電波1を受信する。電子計算機4は、電波望遠鏡3が受信した天空の位置座標ごとの電波受信レベル値を、データベース5に記憶されている同じ座標ごとの電波受信レベル値と比較して、電波受信レベル値が通常よりも小さい座標位置に物体2が宇宙由来の電波1を遮っている影があることを算出する。表示器6は、電子計算機4の計算による物体2の検出結果に基づいて、例えば、天空の位置座標ごとの電波受信レベル値の比率を、色彩や濃淡で表現して表示する。
(もっと読む)
受信強度検出器および移動局測位システム
【課題】電波の受信強度を精度よく算出するための受信強度検出器、および、受信強度検出器によって得られる受信強度の値を用いて移動局の位置を算出する移動局測位システムを提供する。
【解決手段】受信強度測定部40(SB1)により、受信時間区間Tにおいて受信した電波の受信強度の瞬時値が所定の計測間隔毎に計測され、分割区間分布算出部42(SB2、3)により、受信時間区間Tを分割することにより得られる分割区間のそれぞれについての受信強度の瞬時値の瞬時値強度分布の分散σが算出され、対象区間判定部44(SB5)により、分割区間分布の分散の値が所定の閾値σ0よりも小さいことに基づいて、分割区間が受信強度算出対象区間であるか否かが判定され、補正受信強度算出部46(SB6)により、受信強度算出対象区間であると判定された分割区間についての受信強度の分布に基づいて、補正受信強度が算出される。
(もっと読む)
測位システム、測位システムに適用可能な送信機および受信機
【課題】ノイズやマルチパスの影響下においても精度のよい測位システムを提供する。
【解決手段】移動局10においては、符号発生部28によって発生される第1符号と所定時間だけ遅れた第2符号とにより、変調部34において第1搬送波と所定位相だけ遅らされた第2搬送波とがそれぞれ変調させられ、合成部44により変調後の信号が合成され送信される。基地局12においては、復調部78により第1基準搬送波および所定位相だけ遅らされた第2基準搬送波に基づいて受信波が復調され、相関演算部88により復調された2つの信号と対応する符号との相関値がそれぞれ算出され、差動アンプ96により算出された2つの相関値の差分が算出され、受信時刻検出部70により2つの相関値の差分に基づいて電波の受信時刻が算出される。また、測位部100はその受信時刻に基づいて移動局10の位置を算出する。
(もっと読む)
41 - 60 / 122
[ Back to top ]