
Fターム[5J070AC15]の内容
レーダ方式及びその細部 (42,132) | 測定量 (6,664) | 移動方向(センス) (168)
Fターム[5J070AC15]の下位に属するFターム
距離の変化によるもの (23)
信号位相の進・遅によるもの (12)
2ミキサを物理的に離したもの (6)
Fターム[5J070AC15]に分類される特許
81 - 100 / 127
人体検知センサ

【課題】マン・マシン・インタフェースとして使いやすい人体検知センサを提供する。
【解決手段】送信波を発生する発振回路と、前記送信波を放射し、前記送信波の物体によ
る反射波を受信波として受信するアンテナと、前記受信波を検知する検波回路と、前記検
波回路に含まれるドップラー信号に基づいて被検知体の検知の有無を判定する制御判断回
路と、を備え、前記制御判断回路は、前記アンテナから放射される電波の方向を変化させ
つつ被検知体の接近を検知する人体検知モードと、前記アンテナから放射される電波の方
向をひとつの方向に維持させつつ前記被検知体が前記アンテナの前で実行する動作を検知
するスイッチ入力モードと、を実行可能であり、前記人体検知モードを実行中に被検知体
を検知すると、前記人体検知モードを終了して前記スイッチ入力モードを実行することを
特徴とする人体検知センサが提供される。
(もっと読む)
高周波センサ装置

【課題】それぞれの方向に電波が放射されているか否かを確実且つ容易に確認できる高周波センサ装置を提供する。
【解決手段】送信波を発生する発振回路と、前記送信波を複数の方向に放射可能とし、前記送信波の物体による反射波を受信波として受信するアンテナと、前記受信波を検知する検波回路と、前記検波回路から出力される信号に含まれるドップラー信号に基づいて被検知体の検知の有無を判定する制御判断回路と、前記制御判断回路にトリガを入力するトリガ入力部と、を備え、前記制御判断回路は、前記アンテナから放射される電波の方向を自動的に前記複数の方向のいずれかに順次切り替えるスキャンモードと、前記アンテナから放射される電波の方向を前記トリガの入力に応じて前記複数の方向のいずれかに順次切り替えるテストモードと、を実行可能であることを特徴とする高周波センサ装置が提供される。
(もっと読む)
高周波センサ装置
【課題】比較的簡単な構成でアナログ的なスイッチ入力が可能とされマン・マシン・インタフェースとして使いやすい高周波センサ装置を提供する。
【解決手段】送信波を発生する発振回路と、前記送信波を放射し、前記送信波の物体による反射波を受信波として受信するアンテナと、前記受信波を検知する検波回路と、前記検波回路から出力される信号に含まれるドップラー信号に基づいて被検知体の検知の有無を判定する制御判断回路と、を備え、前記制御判断回路は、前記ドップラー信号の周波数が第1の所定値以上であり且つ前記ドップラー信号の振幅が所定の閾値を越えるたびにパルス信号を出力することを特徴とする高周波センサ装置が提供される。
(もっと読む)
通過管理システム
【課題】部屋の入退室管理や商品の在庫管理などに使用され、壁の一方側と他方側とに設置される質問器がLF帯の起動信号を発生し、応答器がそれに応答して内蔵電池を電源としてUHF帯の信号で識別情報(ID)を含む応答信号を返信することで、質問器が壁を隔てて一方側から他方側へ通過する前記応答器を検知するようにしたLF帯、UHF帯併用の通過管理システムにおいて、そのような電波式によっても、壁の両側に設置した質問器間の干渉を無くせるようにする。
【解決手段】質問器31,32は、相反動作で前記起動信号を送信する(一方がONのときに他方はOFF)。したがって、安くて使い勝手の良い電波式を用いても、壁の両側にそれぞれ設置される質問器間での干渉を無くすことができる。これによって、それらを近接配置することができ、配線の引き回しなど、施工上の問題を小さくすることができる。
(もっと読む)
無線タグ通信装置及び無線タグ通信システム
【課題】簡単な構成により実用的なセキュリティシステムを実現する無線タグ通信装置を提供する。
【解決手段】無線タグ14との間の通信の指向性を制御する指向性制御部54と、その指向性制御部54により定められる各指向性における無線タグ14からの返信信号に基づいて所定の領域内における通信状態の変化を検出する通信状態変化検出部66とを、備えたものであることから、電波遮蔽物或いは電波反射物としての移動体94の移動による無線タグ14との間の通信の阻害やマルチパスの形成等を観察することで、所定の領域内における移動体94の移動を簡便に検出することができる。
(もっと読む)
移動物体検出装置
【課題】僅かしか移動しない物体でも検出できる移動物体検出装置を提供する。
【解決手段】二次元直交座標系において原点を始点とし一対のドップラー信号E,E’の振幅レベルの値Xn,Ynを終点とするベクトルRnが時間の経過に伴って回転するときの回転角φnを求めてこれを積算する。さらに回転角φnの積算値を閾値回路88にて所定の閾値と比較し、積算値が閾値を越えたときに検出信号を送出する。従来例のように一対のドップラー信号E,E’を2値化する際に欠落してしまう情報を含めてドップラー信号E,E’の変化を詳細に調べることができるから、従来例では検出し得なかったような僅かしか移動しない物体、例えば、同一象限内に留まる程度の移動しかしない物体Oでも検出することができる。
(もっと読む)
移動物体検出装置
【課題】移動物体の誤検出を防止する。
【解決手段】判定回路86では、発振回路1から第1周波数f1の送波信号を送波器3に出力させて移動物体を検知したとき、第1周波数f1と異なる第2周波数f2の送波信号を発振回路1から送波器3に出力させる。そして、第2周波数f2の送波信号についても移動物体を検知したとき、言い換えるとすべての周波数(第1周波数f1並びに第2周波数f2)の送波信号について移動物体を検知したときにのみ判定回路86から検出信号を出力する。その結果、例えば、監視空間の外から大きなエネルギ波(音圧レベルが非常に高い音波)が到来したときでも移動物体の誤検出が防止できる。
(もっと読む)
レーダを用いた自動ドアセンサおよびその物体検出方法
【課題】自動ドアの監視領域に自動ドアに近づく方向に移動する接近者と、自動ドアから離れる方向に移動する離脱者とが居る場合、接近者のみを確実に識別する。
【解決手段】自動ドアの近傍に設定された監視領域に対する送受信機として、所定周波数のマイクロ波を送出する発振部と、監視領域内に存在する物体からの反射波を受信する受信部とを含み、受信部内に第1,第2の検波器121,122がマイクロ波の波長をλとして前後方向にλ/4離間して配置されているレーダ11が用いられ、前方の検波器121から出力されるIch信号と後方の検波器12から出力されるQch信号とにより、監視領域内の物体を検出して自動ドアに開閉制御信号を出力するにあたって、移相器21によりIch信号とQch信号のいずれか一方の位相をいずれか他方に対して+90゜もしくは−90゜ずらしたのち、Ich信号とQch信号とを加算もしくは減算することにより、接近者のみを確実に識別する。
(もっと読む)
目標物監視装置、及び目標物監視方法
【課題】複雑なアルゴリズム処理を要することなく、監視対象となる目標物の検出方向を
精度良く決定することができ、安価な構成部品により、目標物の誤検出を防止することが
できる目標物監視装置を提供すること。
【解決手段】監視対象となる目標物を検出する目標物検出部23aと、走行している道路
のカーブR情報を取得するカーブ情報取得部23bと、所定期間内におけるカーブR情報
の変動状態を判定するカーブ変動状態判定部23cとを備え、カーブ変動状態判定部23
cによりカーブR情報の変動状態が所定の変動条件を満たしたと判定された場合、目標物
検出部23aが、所定の閾値条件を満たすカーブR情報を利用して目標物を検出する。
(もっと読む)
IDドップラー移動検出器
無線周波識別(RFID)検出システムに用いられるRFIDリーダーのためのシステム及び方法。リーダーは、RF信号を生成するRF源を有する。アンテナがRF源に接続されている。このアンテナは、呼掛領域内の一つ以上のRFIDマーカーに呼掛RF信号を送信し、且つ呼掛領域内の一つ以上のアイテムから交信信号を受信する。その交信信号は、呼掛領域内のアイテムの移動を示すドップラー信号を含む。受信機は交信信号を受信し、運動検出回路系はドップラー信号を検出する。 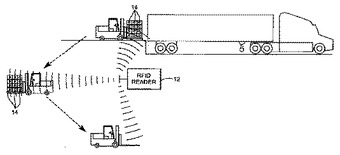 (もっと読む)
(もっと読む)
高周波センサ装置
【課題】放射パターンの制御が容易なアンテナを備えた高周波センサ装置を提供すること。
【解決手段】 送信波を発生する送信部と、前記送信波を放射し、前記送信波の物体による反射波及び透過波の少なくともいずれかを受信波として受信するアンテナと、前記受信波を検知する受信部と、を備え、前記アンテナは、パッチ電極を有する給電素子と、前記給電素子と併設されそれぞれがパッチ電極を有する第1及び第2の無給電素子と、を含み、前記第1の無給電素子は、前記パッチ電極の辺のうち励振方向に対して直交する辺の中央近傍から前記励振方向に対して平行に延在し導波器として作用する第1の長さの伝送線路を有し、前記第2の無給電素子は、前記パッチ電極の辺のうち励振方向に対して直交する辺の中央近傍から前記前記励振方向に対して平行に前記第1の長さだけ延在する部分と、前記延在する部分に対して略垂直に屈曲した部分と、を有し反射器として作用する第2の長さの伝送線路を有することを特徴とする高周波センサ装置が提供される。
(もっと読む)
車両識別システム
【課題】より効率的に車両を識別する「車両識別システム」を提供する。
【解決手段】他車向き算定部5は、レーダ装置1が同じ他車に対して測定したレーダ反射強度の推移と、RCSテーブル群6のRCSテーブルが表す車両の各方向の有効レーダ反射面積より、現在の他車のカメラによって撮影される画像に写り込む向きを算定する。画像認識処理部4は、カメラ2が撮影された画像に対して画像認識処理を施して他車を識別する。また、この画像認識処理において、画像認識処理部4は、他車向き算定部5によって算定された向きを向いた車両の認識に好適化した画像認識を優先的に実行する。
(もっと読む)
レーダ計測システム
【課題】レーダ装置を用いて移動体の角速度を算出する「レーダ計測システム」を提供する。
【解決手段】レーダ装置で検出した、同一物体上の点である可能性が認められる程度に近接している二つの検出点a、bの、地面に対する速度ベクトルva、vbを求め、検出点aの位置paを通り速度ベクトルvaと垂直な直線と、検出点bの位置pbを通り速度ベクトルvbと垂直な直線との交点を仮想中心点Oとし、位置paから速度ベクトルvaで単位時間進んだ相対位置qaと、位置pbから速度ベクトルvbで単位時間進んだ相対位置qbを求め、pa-O-qaの角度θaを検出点aの角速度、pb-O-qbの角度θbを検出点bの角速度として求める。そして、両角速度が近似していれば、強検出点に、bに、求めた二つの角速度の平均値を角速度として設定する。
(もっと読む)
レーダ装置及びレーダ画像表示方法
【課題】異なるパルス幅の信号から得られた画像を同一画面上に同時に表示する場合であっても、すべてのレンジで同じ内容の追尾物標の運動情報を表示できるレーダ装置及びレーダ画像表示方法を提供することを目的とする。
【解決手段】所定の送信パターンで送信した2以上の異なるパルス幅信号を受信し、該受信した同じ送信パルス幅のエコー信号毎に、探知レンジに対応する表示用エコーデータを生成するエコーデータ生成部と、異なる送信パルス幅のエコー信号を用いて、表示用エコーデータと重畳する1つの追尾物標の運動情報を生成するARPA処理部と、前記ARPA処理部で生成された追尾物標の運動情報を、前記表示用エコーデータに重畳する表示出力合成部と、前記表示出力合成部で重畳した画像を表示する表示部とを備えることを特徴とする。
(もっと読む)
移動体監視システムおよび方法
【課題】複数の自由移動体を広い範囲に亘って監視する移動体監視システムを提供する。
【解決手段】送信電波の有効到達範囲以内を監視エリア10とする少なくとも1台の無指向性発信装置2から送信電波を放射し、移動体8にそれぞれ付帯された無指向性受送信装置9で受信し、送信電波の受信に応答して、無指向性受送信装置9から、自己の識別符号を根拠に呼を電波により送信し、前記呼を少なくとも1台の無指向性受信装置3で受信して通信の接続を完了し、通信の接続完了後に、通信の接続完了後に、無指向性受信装置3から前記識別符号の無指向性受送信装置9との通信の接続ができた旨の確認信号を本体制御装置1に出力する。本体制御装置1おいて、無指向性発信装置2に対して発信を指示した後、無指向性受信装置3から前記確認信号を受けた場合には移動体8が監視エリア10内に居るか否かを判断し、前記確認信号が受信不能な場合には居ないと判断する。
(もっと読む)
UWBレーダによる共振タグの検出
検出システムは、UWB電磁放射のパルスによる照射に対する磁気共鳴応答を有する物質を検出するための受信機を有し、上記受信機は、パルスが物質と相互に作用した後にパルスを検出するための検出器(40、45)と、検出されたパルス内で物質の磁気共鳴応答を識別するように設けられた識別器(55)とを有する。磁気共鳴応答を有する物質を有するタグ(20)でタグ付けされたアイテムを、上記アイテムをUWBパルスで照射し検出されたパルス内で物質の磁気共鳴応答を識別して走査することによって、アイテムは位置づけられ、イメージングされ、又は起動されることが可能である。タグの磁気共鳴応答は、タグの起動を引き起こすことができる。タグは、異なるタグをそのシグネチャによって識別しかつ区別化できるように識別可能な磁気共鳴のシグネチャを提供するように設けられた磁気共鳴応答を有することが可能である。 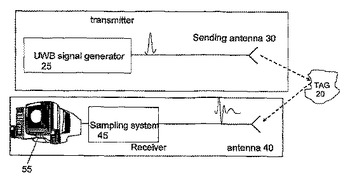 (もっと読む)
(もっと読む)
超広帯域探測信号の支援により移動物体を検出するセンサ
【課題】モニタされる領域内で移動物体、例えば人間を検出するために使用することができるセンサを提供する。
【解決手段】第1の実施形態では、本発明のセンサは、第1及び第2のアンテナと、2つの出力部が設けられ、その第1の出力部が第1のアンテナの入力部/出力部に接続され、第2の出力部が第2のアンテナの入力部/出力部に接続されたパルス発生器とを含む。センサの出力回路は、2つの検出器から成り、第1の検出器の入力部は、第1のアンテナの入力部/出力部に接続され、第2の検出器の入力部は、第2のアンテナの入力部/出力部に接続される。第1の検出器の出力部は、差動増幅器の第1の入力部に接続される一方、第2の検出器の出力部は、その第2の入力部に接続される。差動増幅器の出力部は、低周波フィルタと、出力部が差動増幅器の入力部の一方に接続されたフィードバック装置とに接続される。低周波フィルタの出力部は、コンパレータ入力部に接続される。第2の変形では、センサの入力回路は、各々に2つの入力部が設けられた2つの検出器から成る。パルス発生器の第1の出力部は、第1のアンテナの入力部/出力部と第1の検出器の第2の入力部とに接続される。第1のアンテナの入力部/出力部は、第2の検出器の第1の入力部に接続される一方、パルス発生器の第2の出力部は、遅延を通じて第2の検出器の第2の入力部に接続される。
(もっと読む)
タグ通信装置、タグ移動方向検知システム及びタグ移動方向検知方法
【課題】RFIDタグが付された移動体の移動方向を、簡易な処理により検知可能であるとともに、その移動速度が速くなっても容易に移動方向の検知が可能なタグ通信装置、タグ移動方向検知システム及びタグ移動方向検知方法を提供する。
【解決手段】スキャンアンテナ4は、送信する電波のビームMをRFIDタグ2付き荷物5が運搬されるベルトコンベア6に向けてスキャンする。RFIDタグ2からIDを読み取り、読取NO.とスキャン角αあるいはβを関連付けて測定データテーブルT2に記録するとともにプロットデータを生成する。このプロットデータをXY座標系にプロットPしてプロットグラフGを生成するとともに、このプロットグラフGから線形近似直線Lを求め、この傾き値Sから荷物5の移動方向を検知する。
(もっと読む)
移動体の移動方向判別プログラム及び装置。
【課題】RFIDタグを備えた移動体の移動方向を、単数のアンテナで、かつ自動で検知するための装置を提供する。
【解決手段】移動体が携帯しているアクティブ型RFIDタグからの電波を受信して、移動体の移動方向を判別する受信装置であって、移動体の移動する経路の途中に配置され、アクティブ型RFIDタグから送信される電波を受信するアンテナと、移動体の移動方向におけるアンテナの一方側に設けられ、アンテナの一方側と他方側とでアンテナの受信レベルに差異を生じさせる電波減衰シールドと、アクティブ型RFIDタグから送信されてアンテナで受信された電波の受信レベルを一定の時間間隔で検出する受信レベル検出手段と、受信レベル検出手段で検出される受信レベルの時間的推移に基づいて移動体の移動方向を判別する判別手段と、を備える。
(もっと読む)
海洋レーダ装置
【課題】海洋レーダでは、海洋流速分布を算出する際、複数サイトにて算出される視線方向流速を合成する。しかし、この方法では、各レーダサイトからの視線方向の交差角が90度より大きく離れる観測エリアにおいては、観測精度が劣化する。そのため、それぞれのレーダサイトの観測覆域の一部しか流速ベクトルの解析に利用できないこと、及び、観測対象覆域に適合する複数レーダサイト設置位置の選定が困難などの問題があった。
【解決手段】レーダ画像から、観測周期及び実際上あり得る最大海流速度より算出されるメッシュエリア毎に、エコー強度分布より波紋パターンを抽出し、その移動量より上記エリアについての流速を算出する。1レーダサイトの情報のみでレーダの覆域と同じ領域において、均一な精度で海流速度を算出可能にする。
(もっと読む)
81 - 100 / 127
[ Back to top ]