
Fターム[5J070BC05]の内容
レーダ方式及びその細部 (42,132) | 二次レーダ (1,855) | 態様 (846) | 位置又は方位 (359)
Fターム[5J070BC05]に分類される特許
61 - 80 / 359
セルラー式移動無線測位システム
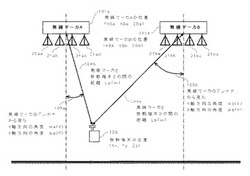
【課題】移動端末の1次元〜3次元の何れかの次元の位置を高精度で測位する装置を安価に実現する。
【解決手段】移動端末103から起点信号を含む無線信号をバースト信号として間欠発信し、セル毎もしくはセクタ毎に配置された複数の無線マーカ101a、101bからは、再生した起点信号と高精度に同期を確立した距離測定信号と、方向を測定するための方向測定信号とを含む無線信号を、複数の指向性アンテナ21aa〜21bdを周期的に切替えながら時分割で発信し、前記移動端末103において、前記距離測定信号の位相を測定して複数の無線マーカ101a、101bからの距離を算出し、前記複数のアンテナ21aa〜21bdに対応した方向測定信号の位相差を測定して複数の無線マーカ101a、101bが位置する方向を算出することによって、前記移動端末103の1次元〜3次元の何れかの次元の位置を高精度で測位する。
(もっと読む)
電波到来方向推定装置および電波到来方向推定方法

【課題】電波到来方向を推定するための受信回路の構成を簡略にした、電波到来方向推定装置および電波到来方向推定方法を提供する
【解決手段】複数のアンテナ11は相対的な位置を固定して配置される。受信機1は、複数のアンテナの数より少ない数であって、所定の電波を受信する。時分割スイッチ14は、受信機1に同時には1つのアンテナ11が接続するように、受信機1とアンテナ11との接続を所定の周期で切り替える。直並列変換器4は、受信機1とアンテナ11との接続を所定の周期で切り替えて受信機1で受信した信号を、複数のアンテナ11のそれぞれで受信した信号に分配する。到来方向算出部5は、複数のアンテナ11のそれぞれで受信した信号に分配した信号から、受信した電波の到来方向を算出する。
(もっと読む)
測定装置
【課題】測定すべき測定情報を推定するときに、測定情報に生じる誤差に関する情報を使用者に提供可能な測定装置を提供する。
【解決手段】観測手段12によって受信した電波信号に基づいて、測定すべき測定情報、たとえば電波信号の到来方位、発信源までの距離または発信源の位置を推定手段13によって推定し、表示手段14によって表示する。このとき、推定手段13によって推定された物理量に含まれる誤差を表す誤差情報を最大誤差評価手段11によって求め、表示手段14によって表示する。最大誤差評価手段11は、たとえば、推定手段13による物理量の推定に用いた推定モデルからの実際の観測量の誤差であるモデル誤差によって推定量に生じる推定誤差の最大値を求め、表示手段14によって表示させる。
(もっと読む)
位置推定装置及び位置推定方法
【課題】ビームアンテナを利用した位置推定において、高精度に位置推定を行なうことを課題とする。
【解決手段】位置推定装置は、指向性アンテナから出力されるビームの方向を制御し、制御された方向での指向性アンテナから出力されるビームを第1周波数で出力する。また、位置推定装置は、出力されるビームを第1周波数で出力した後に、第1周波数とは異なる第2周波数で出力する。また、位置推定装置は、第1周波数のビームの出力が到達した無線タグを有する端末装置から当該無線タグのIDを取得する。また、位置推定装置は、第2周波数のビームの出力が到達した無線タグを有する端末装置から当該無線タグのIDを取得する。また、位置推定装置は、第1周波数及び第2周波数のビームで共通に取得されたIDを特定し、特定されたIDとビームの方向とを出力する。
(もっと読む)
エネルギー効率のよい送信のためのビット・レートおよび送信電力を選択する方法
伝搬時間距離決定方法は、ハンドセットからAPへとプローブ要求を送ることと、返りのACKを受信することとを含む。プローブ要求がAPへと伝搬するのにかかる時間と、ターンアラウンド時間と、ACKが伝搬してハンドセットへと返ってくるのにかかる時間とが、ハンドセットで測定される。ターンアラウンド時間が、測定された時間から減じられ、その結果が、距離決定を行うために使用される。電力の消費を減じるために、ハンドセットによってAP局へと送られたプローブ要求の許容可能な受信をもたらす「最低総送信エネルギー」設定が、決定される。最低総送信エネルギー設定は、ビット・レート設定と送信電力設定とを含む。最低総送信エネルギー設定は、伝搬時間距離決定トランザクションの実行にあたり、プローブ要求がハンドセットから送られる場合にプローブ要求を送るために使用される。 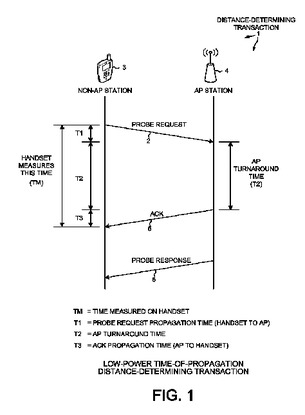 (もっと読む)
(もっと読む)
携帯型無線周波数識別(RFID)読取り機
ある特定の携帯型無線周波数識別(RFID)読取り機は、RFID装置からRFID信号を受信するための複数のアンテナ要素を含む能動型アンテナアレイを含む。アンテナ要素は、能動型アンテナアレイにより生成されるビームパターンを制御するための制御回路を含む。携帯型RFID読取り機は、和回路と差回路とをさらに含む。和回路は、複数のアンテナ要素のうちの少なくとも2つにより受信されるRFID信号を合計することにより和信号を決定するよう動作可能である。差回路は、複数のアンテナ要素のうちの少なくとも2つにより受信されるRFID信号同士の差信号を決定するよう動作可能である。携帯型RFID読取り機はまた、ビームパターンを電子的に誘導して、RFID読取り機からある特定のRFID装置への方向を特定するためのコントローラを含む。 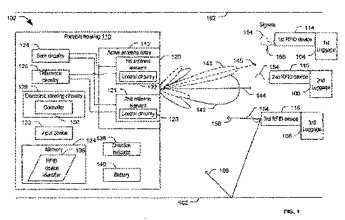 (もっと読む)
(もっと読む)
処理遅延のリアルタイム較正および報告のための方法およびシステム
本明細書で開示する主題は、第1のワイヤレスデバイスによって送信チェーンおよび受信チェーン処理遅延を推定するシステムおよび方法に関する。 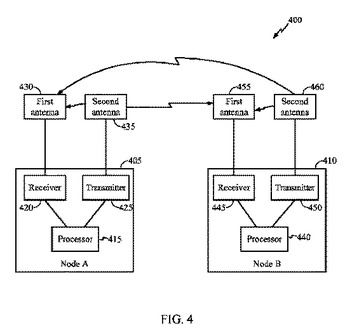 (もっと読む)
(もっと読む)
移動体管理装置
【課題】タグを有しない移動体を的確に判定することのできる移動体管理装置を得る。
【解決手段】ID付き移動体動線作成部2は、ID付き移動体位置検知部1a,1b,1cの検知結果からタグの時空間の動線をID付き移動体動線として作成する。移動体動線作成部4は、移動体位置検知部3a,3b,3cの検知結果から移動体の時空間の動線を移動体動線として作成する。動線比較部5は、ID付き移動体動線と移動体動線とを比較し、動線が近いものを対応付ける。判定部6は、動線比較部5において、対応付けがなされない動線の移動体をタグを有しない移動体として判定する。
(もっと読む)
電子キーシステムのキー位置判定装置
【課題】電子キーの位置をより精度よく検出することができる電子キーシステムのキー位置判定装置を提供する。
【解決手段】車両の運転席アンテナ及び助手席アンテナから交互に電波を送信して、これら電波を電子キーが受信したときの磁界強度Hd,Hpと電波到来方向Kd,Kpとを算出する。そして、磁界強度Hd,Hpの大小を比較して、電子キーの車外位置を判定する。このとき、磁界強度Hd,Hpのうち高い側が磁界強度範囲Eaに位置して、単なる大小判定ではキー位置を判定できない場合、電波到来方向Kd,Kpの電波角度差θxからキー位置を判定する。電波角度差θxが重複範囲Ebに位置してキー位置を判定できない場合、電波角度差θx及び2つの磁界強度Hd,Hpを繋いだ三角線25を算出し、この三角線25が成す角度θrにより、キー位置を最終判断する。
(もっと読む)
二次監視レーダ
【課題】航空機の監視とともに、空港付近を飛行する航空機の危険を防止する。
【解決手段】危険進路を飛行する航空機の有無を判定する判定部(134i)と、判定部によって危険進路を飛行する航空機が存在すると判定されたとき、航空機に搭載される航空機衝突防止装置に衝突の回避を促がす回避指示信号を送信するタイミングを設定する設定部(135)と、設定部で設定された回避指示信号の送信タイミングで、回避指示信号の送信用として規定される質問信号の受信周波数を送信機に出力する周波数切替部(137)と、送信タイミングで、周波数切替部から出力された質問信号の受信周波数の回避指示信号を送信させるように送信機を制御する送信制御部(131)とを備える。
(もっと読む)
物体の向き検出システム
【課題】簡易かつ安価で正確に物体の姿勢を検出できる物体の向き検出システムを提供することを目的とする。
【解決手段】測定対象物30の両面にはRFタグユニット20a,20bが取り付けられている。RFタグユニット20a,20bは、それぞれRFタグ21a,21bと高透磁率シート22a,22bと電磁波遮断シート23a,23bとが順に積層されている。RFタグリーダ10の送信信号生成部11で生成された送信信号は、アンテナ13から電磁波として放射される。受信信号判定部12は、RFタグ21a,21bからの応答の有無に基づいて、測定対象物30のいずれの面がRFタグリーダ10のアンテナ13側を向いているのか判定し、うつ伏せ状態を検出する。
(もっと読む)
自律移動支援システムとその制御方法
【課題】移動端末あるいは基準局から発信する無線信号を、複数の中継手段によって中継しあるいは再発信し、位置特定手段によって受信することで、前記移動端末の位置を高精度で特定できる自律移動支援システムを提供する。
【解決手段】位置特定手段において移動端末の位置を特定し、あるいは位置特定手段において自局の位置を特定するシステムにおいて、無線信号が同一周波数であり、時分割でかつバースト信号として間欠発信するための、移動端末あるいは基準局と、前記移動端末あるいは基準局から発信される無線信号を中継しあるいは再発信するための中継手段と、位置を特定するための位置特定手段とから構成される。
(もっと読む)
2次監視レーダ及び信号処理方法
【課題】電波障害時であっても機上からの情報を正しく復号可能にすること。
【解決手段】2次監視レーダ装置は、ターゲットに対して複数の質問を送信する送信部23と、前記ターゲットから送られてくる前記質問に対する応答を受信する受信部22と、前記ターゲットの方位及び距離をもとに前記応答のタイミングを予測し、前記タイミングに基づいて前記複数の質問に対する応答の受信判定を行い、前記受信判定において受信できなかった応答を受信するために質問を再送し、前記受信された応答の順番を並べ替え、前記順番に基づいてターゲットレポートを作成する信号処理装置3とを具備する。
(もっと読む)
シミュレータ
【課題】信号の輻輳、輻輳、フルーツ干渉等の発生時における二次監視レーダ及びSIF装置の動作を検証する。
【解決手段】対象範囲に検証の対象として所定時刻に存在が想定される機体の位置と、当該機体が応答する信号の種別と、当該機体の送信信号の情報を関連付ける機体データを記憶する機体データ記憶部13eと、動作を検証する装置が機体に送信した所定形式の信号を入力すると、機体データから、入力した信号の送信対象である機体の位置及び信号の種別と関連付けられる送信信号の情報を検索する機体検索手段13fと、機体データから検索された送信信号の内容を合成して模擬信号を生成する応答発生手段13gとを備える。
(もっと読む)
対象物を位置特定するための方法およびシステム
本文書は対象物の位置特定のための方法およびシステムを説明する。対象物(1)は少なくとも一つの第1のタイプの信号を照射され、前記信号の反応を探知する方法を踏まえ。本発明によれば、前記対象物(1)は前記第1のタイプの信号を後方散乱するトランスポンダ(2,3)を取り付けられ、前記トランスポンダ(2,3)は、前記トランスポンダ(2,3)の後方散乱周波数に影響を与える第2のタイプの信号でも照射され、前記トランスポンダ(2,3)からの後方散乱信号は対象物を位置特定するために探知される (もっと読む)
微小移動検出装置
【課題】回路構成の複雑化を防止しつつ大幅な変位の測定を行うことができる微小移動検出装置を提供する。
【解決手段】微小移動検出装置は、測距基準点に固設されて投射波Xを投射するセンサ10と、測距対象上に配設されて投射波Xを反射波Yとして反射するレピータ20とを備えており、センサ10は、所定の周波数変調を行った投射波をレピータ20に送信すべき投射波Xとして生成する高周波発振器11と、投射波Xに対する反射波Yの位相ずれを検出する位相検出器17と、位相検出器17の検出結果に基づいて、投射波Xの周波数変化に従って変化する位相ずれの回転周期数を計数する位相計数器18と、位相計数器18の計数結果に基づいて測距対象までの距離を求める演算部19bとを備える。
(もっと読む)
超高感度距離又は位置計測システム
【課題】三次元位置を正確に測位できるシステムを提供する。
【解決手段】UWB送受信機1と、サーバー3と、UWB用RFタグTとを、備え、UWB送受信機1は、RFタグTから反射されるM系列のPN符号を、同期加算及び相関計算する。
(もっと読む)
最適位置算出装置、最適位置算出方法およびプログラム
【課題】任意のタイミングで、高精度、かつ、軌道が滑らかな航空機情報を表示する技術を提供する。
【解決手段】最適位置算出装置20は、複数のセンサのそれぞれによって観測された観測データに基づく航空機情報を記憶する航空機情報記憶部210と、前記複数のセンサのうち2以上のセンサを優先センサとして特定するための優先センサ情報を各観測領域に対応付けて記憶する優先センサ情報記憶部200と、航空機の表示位置の更新タイミングにおいて、前記優先センサ情報に基づいて、複数の前記航空機情報のなかから、前記優先センサによって観測された最新の観測データに基づく前記航空機情報を抽出するセンサ選択部240(航空機情報抽出部)と、抽出された前記航空機情報に基づいて、前記更新タイミングにおける航空機の最適位置を算出する最適位置算出部250と、前記最適位置を出力する表示部260(出力部)とを備える。
(もっと読む)
位置検出装置、位置検出システム及び無線通信システム
【課題】移動体の現在位置を、複雑な計算を伴わずに正確に検出でき、位置検出のための情報を登録する必要のない位置検出装置、位置検出システム及び無線通信システムを提供する。
【解決手段】移動体が移動する移動路に沿って等間隔に順に配置される共振タグに専用のアンテナと、このアンテナを介して共振タグを読み取る共振タグ読取部と、共振タグ読取部により読み取った共振タグの数に基づいて移動体の位置を検出する位置検出部と、を備える。
(もっと読む)
位置検出装置、位置検出システム及び無線通信システム
【課題】移動体の現在位置を、複雑な計算を伴わずに正確に検出でき、位置検出のための情報を登録する必要のない位置検出装置、位置検出システム及び無線通信システムを提供する。
【解決手段】隣り合うものの共振周波数が異なるように移動体が移動する移動路に沿って等間隔に順に配置される複数種類の共振タグのそれぞれに専用のアンテナと、このアンテナの各々を介して共振タグを読み取る共振タグ読取部と、共振タグ読取部により読み取った共振タグの数に基づいて移動体の位置を検出する位置検出部と、を備える。
(もっと読む)
61 - 80 / 359
[ Back to top ]