
密閉容器の蓋閉鎖方法及び密閉容器の蓋開閉システム
【課題】FIMSシステムにおいてポッド開口を蓋によって閉鎖する動作時に当該蓋が適切にポッドに固定されていることを検知する方法を提供する。
【解決手段】ポッドに対して蓋を取り付ける際にドアが所定の位置に存在するか否か及びポッドが蓋開閉位置からの変位の有無を判定し、更に蓋をポッドに係止させた後に再度ドアが所定の位置に存在するか否か及びポッドが蓋開閉位置からの変位の有無を判定し、何れの判定においてもドアが所定位置に存在し且つポッドが変位しないことが確認された場合に、蓋の固定が適切であると判定する。
【解決手段】ポッドに対して蓋を取り付ける際にドアが所定の位置に存在するか否か及びポッドが蓋開閉位置からの変位の有無を判定し、更に蓋をポッドに係止させた後に再度ドアが所定の位置に存在するか否か及びポッドが蓋開閉位置からの変位の有無を判定し、何れの判定においてもドアが所定位置に存在し且つポッドが変位しないことが確認された場合に、蓋の固定が適切であると判定する。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、半導体製造プロセス等において、ポッドと呼ばれる搬送容器に内部保持されたウエハを半導体処理装置間にて移送する際に用いられる、所謂FIMS(Front-Opening Interface Mechanical Standard)システムに関する。より詳細には、ウエハを収容する密閉容器たる所謂FOUP(Front-Opening Unified Pod)と呼ばれるポッドが載置され、当該ポッドの蓋を開閉して該ポッドに対するウエハの移載を行うFIMSシステムにおいて、蓋が取り外された状態にあるポッドに対して該蓋を固定してポッド開口を閉鎖する方法、及び当該方法を好適に実施する蓋開閉システムに関する。
【背景技術】
【0002】
以前、半導体製造プロセスは、半導体ウエハを取り扱う部屋内部を高清浄化した所謂クリーンルーム内において行われていた。しかしウエハサイズの大型化への対処とクリーンルームの管理に要するコスト削減の観点から、近年では処理装置内部、ポッド(ウエハの収容容器)、及び当該ポッドから処理装置への基板受け渡しを行う微小空間のみを高清浄状態に保つ手法が採用されるに至っている。
【0003】
ポッドは、その内部に複数のウエハを平行且つ隔置した状態で保持可能な棚と、外面を構成する面の一つにウエハ出し入れに用いられる開口とを有する略立方体形状を有する本体である密閉容器と、その開口を閉鎖する蓋とから構成される。この開口が形成されている面がポッドの底面ではなく一側面(微小空間に対して正対する面)に位置するポッドは、FOUP(front-opening unified pod)と総称され、本発明はこのFOUPを用いる構成を主たる対象としている。
【0004】
上述した微小空間は、ポッドの開口と向かい合う第一の開口部と、第一の開口部を閉鎖するドアと、半導体処理装置側に設けられた処理装置側の開口部と、第一の開口部からポッド内部に侵入してウエハを保持すると共に該処理装置側の開口部を通過して処理装置側にウエハを搬送する移載ロボットとを有している。微小空間を形成する構成は、同時にドア正面にポッド開口部が正対するようポッドを支持する載置台を有している。
【0005】
載置台上面には、ポッド下面に設けられた位置決め用の穴に嵌合されてポッドの載置位置を規定する位置決めピンと、ポッド下面に設けられた被クランプ部と係合してポッドを載置台に対して固定するクランプユニットとが配置されている。通常、載置台はドア方向に対して所定距離の前後移動が可能となっている。ポッド内のウエハを処理装置に移載する際には、ポッドが載置された状態でポッドの蓋がドアと接触するまでポッドを移動させ、接触後にドアによってポッド開口部からその蓋が取り除かれる(特許文献1参照)。これら操作によって、ポッド内部と処理装置内部とが微小空間を介して連通することとなり、以降ウエハの移載操作が繰り返して行われる。この載置台、ドア、第一の開口部、ドアの開閉機構、第一の開口部が構成された微小空間の一部を構成する壁等を含めて、FIMS(front-opening interface mechanical standard)システムと総称される。
【先行技術文献】
【特許文献】
【0006】
【特許文献1】特開平11−288991号公報
【特許文献2】特開2001−077177号公報
【発明の概要】
【発明が解決しようとする課題】
【0007】
当該ポッドの蓋には、特許文献2に詳細に開示されるように蓋外周から外方方向に伸縮可能な係合爪が配され、ポッド側には当該係合爪に応じた位置に該係合爪が係合する受容孔が設けられる。これら係合爪及び受容孔は蓋をポッドに固定する係合手段として作用する。従来構成では、当該爪の伸縮によってポッド−蓋の係合及び解除の各々の状態を得ることとしている。例えば、ポッド開口を当該蓋によって閉鎖する場合、開口と蓋との間の異物の存在、或いは載置台上のポッドの位置精度、ドアの動作精度等の誤差の積算による位置ずれによって、蓋に配された爪がポッド側の受容孔に正確に挿入されない場合がある。この場合、ポッド開口が蓋によって完全に閉鎖されたと認識されてしまうと、ポッドの移動等の操作が続けて実行されてしまい、搬送中等において蓋がポッドから外れてしまう可能性がある。現在は、当該状況への対処として、特許文献2に開示されるように、爪の状態を検出するセンサを配して、当該爪の正常位置からの変位を検出することで確実な閉鎖の可否を知る方法が検討されている。
【0008】
従来のポッドサイズにおいては、蓋、ポッド側の受容孔及び爪の突き出し部分各々のサイズの関係から、蓋による閉鎖不良自体がそれほど生ずる可能性があるものではなかった。また、爪の動作を検知することも比較的容易であり、爪を動作させる機構からの異常検知によって閉鎖状態の適否を知ることも可能であった。しかしながら、昨今のウエハサイズの大径化によりポッドが大型化したことによって、ポッドサイズに対する爪の係合部分のサイズが相対的に小型化せざるを得なくなったことから、閉鎖不良が生じる可能性の増加、或いは閉鎖不良が生じても爪の動作上は異常が検地され得ない自体が生じる可能性の発現が考えられる。更に、現在汎用されているポッドにはこのような爪の検知機構は配されておらず、実際に当該方法を提供しようとするとポッドを全て交換する或いは改造する必要がある。また、ポッドの形状等に依存して、当該機構を配すること自体が困難な場合も考えられる。
【0009】
本発明は以上の状況に鑑みて為されたものであり、ポッドに対して蓋を取付けて開口を閉鎖する動作において、蓋がポッドに対して確実に係合した状態に在ることを検知し、当該検知の後にポッドのFIMSからの離脱を可能とする密閉容器の蓋閉鎖方法、及び当該方法に供せられる密閉容器の蓋開閉システムの提供を目的としている。
【課題を解決するための手段】
【0010】
上記課題を解決するために、本発明に係る蓋閉鎖方法は、蓋と蓋により閉鎖される開口を一側面に有すると共に内部に被収容物を収容可能な密閉容器に対して蓋を開閉して密閉容器内部への被収容物の挿脱を可能とする蓋開閉システムにおいて、蓋により開口を閉鎖する蓋閉鎖方法であって、蓋及び密閉容器は蓋或いは密閉容器の外部からの操作によって蓋を密閉容器に対して固定する係合手段を有し、蓋開閉システムは、開口部を有する微小空間と、開口部を略閉鎖する位置と開放する位置との間で移動可能であって、蓋を保持する蓋保持手段を有するドアと、開口部に対して開口が正対するように密閉容器を載置可能であると共に、密閉容器と共に開口部に対して接近及び離間可能であって、接近時において蓋を取り外して被収容物を挿脱する第一の位置に密閉容器を配置し、離間時において密閉容器のロード及びアンロードを行う第二の位置に密閉容器を配置するドッキングプレートと、ドッキングプレートの接近及び離間の動作を為すドッキングプレート駆動手段と、を有し、ドアにより前記開口を閉鎖する位置に前記蓋を移動させ、ドアが開口部を略閉鎖する位置に存在すること、及びドッキングプレートが第一の位置に存在することを判定し、係合手段によって蓋を密閉容器に固定し、ドアが開口部を略閉鎖する位置に存在すること、及びドッキングプレートが第一の位置に存在することを判定する、工程を有することを特徴としている。
【0011】
上述した蓋閉鎖方法あっては、ドッキングプレート駆動手段はシリンダ機構からなる駆動手段であって、ドッキングプレート駆動手段によるドッキングプレートの駆動力は、ドアが開口部を略閉鎖するために移動される際の駆動力よりも小さく設定されることが好ましい。また、ドアは、ドアを一方の端部に支持するドアアームと、ドアアームの他方の端部に連結されてドアアームを駆動するドア開閉アクチュエータと、ドア及びドア開閉アクチュエータの間においてドアアームを回転可能に軸支する回転中心とによって回動可能に支持され、ドアが開口部を略閉鎖する位置に存在するか否かの判定は、ドアアームにおける回転中心とドアとの間に配置されるドア位置検知センサから得られる信号に基づくことが好ましい。更に、ドア位置検知センサは、微小空間を画定する筐体における開口部が形成される面に対向するドアアームの表面に配置されるドア側凹部と、ドア側凹部に収容されて先端部をドアアーム表面より突出させる可動ドグと、ドア側凹部に収容されて可動ドグに対して突出方向の付勢力を与える付勢手段と、可動ドグの停止位置に応じて可動ドグのドアアーム表面からの突出量に対応した信号を発する可動ドグ位置検出センサと、を有することが好ましい。或いは、ドア位置検知センサは、ドアアームから突出するドア用センサドグと、微小空間を画定する筐体に設けられてドア用センサドグが進入可能な凹部であるセンサ用凹空間に配置されるフォトセンサと、からなり、センサドグのセンサ用凹空間への進入に伴って二段階に変化する信号を発することがより好ましい。
【0012】
また、上記課題を解決するために、本発明に係る蓋開閉システムは、蓋と蓋により閉鎖される開口を一側面に有すると共に内部に被収容物を収容可能な密閉容器に対して蓋を開閉して密閉容器内部への被収容物の挿脱を可能とする蓋開閉システムであって、蓋及び密閉容器は蓋或いは密閉容器の外部からの操作によって蓋を密閉容器に対して固定する係合手段を有し、蓋開閉システムは、第一の開口部を有する微小空間と、開口部を略閉鎖する位置と開放する位置との間で移動可能であって、蓋を保持する蓋保持手段を有するドアと、開口部に対して開口が正対するように密閉容器を載置可能であると共に、密閉容器と共に開口部に対して接近及び離間可能であって、接近時において蓋を取り外して被収容物を挿脱する位置に密閉容器を配置し、離間時において密閉容器のロード及びアンロードを行う位置に密閉容器を配置するドッキングプレートと、ドッキングプレートの前記接近及び離間の動作を為すドッキングプレート駆動手段と、ドッキングプレートが前記接近時の位置から変位したことを検知する変位検知手段と、ドアが開口部を略閉鎖する位置に存在するか否かに応じた信号を発するドア位置検知センサと、を有することを特徴としている。
【0013】
なお、上述した蓋開閉システムにあっては、ドッキングプレート駆動手段はシリンダ機構からなる駆動手段であって、ドッキングプレート駆動手段によるドッキングプレートの駆動力は、ドアが開口部を略閉鎖するために移動される際の駆動力よりも小さく設定されることが好ましい。
【発明の効果】
【0014】
本発明によれば、ポッドサイズ等によらず、蓋の爪がポッド本体と係合しているか否かを確実に知ることが可能となる。従って、搬送時において蓋の脱落等が生じる可能性なくすることができ、ポッドの搬送速度をより早くすること等、ポッド搬送系の操作条件、或いは搬送系自体の選択肢を大きくすることが可能となる。また、基本的にはポッド側に何ら特別な機構を配する必要が無いことから、従来のポッド等をそのまま用いることが可能となり、装置使用者に対した新たなコスト負担を生じさせることが無い。また、本発明によれば、従来装置に対してドアの停止位置を検知するセンサを付加し、当該センサ及び後述するドックセンサ等から得られる信号を用いることによっても、制御上のフローを修正することで簡便な蓋の固定状況の検知を実施することが可能となる。従って、従来装置のハード上の構成を殆ど改変することなく、本発明を実施することが可能となる。
【図面の簡単な説明】
【0015】
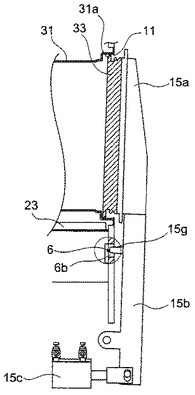
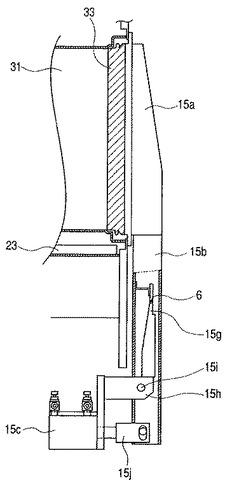
【図1】本発明の一実施形態に係るロードポート装置の概略構成を示す側断面図である。
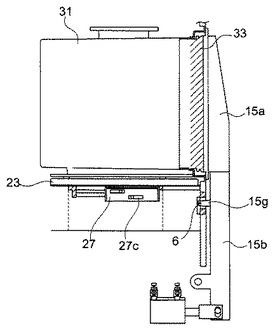
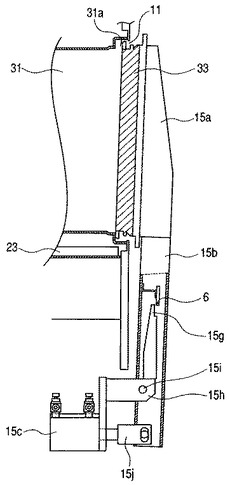
【図2】本発明の一実施形態に係るロードポート装置の主要部概略構成を図1と同様の様式にて示す拡大側断面図である。
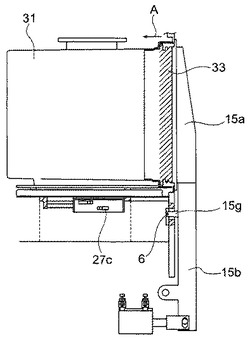
【図3】図1に示すロードポート装置においてドア及び第一の開口部周辺に配置される構成を拡大して模式的に示す図である。
【図4A】図1に示す構成において蓋33がポッド31に対して正常に取り付けられた状態についてドア位置検出センサに着目してこれらを示す図である。
【図4B】図4Aと同様の様式によって、蓋33がポッド31に対して正常に取り付けられない状態を示す図である。
【図5A】図1に示す構成において蓋33がポッド31に対して正常に取り付けられた状態についてドックセンサに着目してこれらを示す図である。
【図5B】図5Aと同様の様式によって、蓋33がポッド31に対して正常に取り付けられない状態を示す図である。
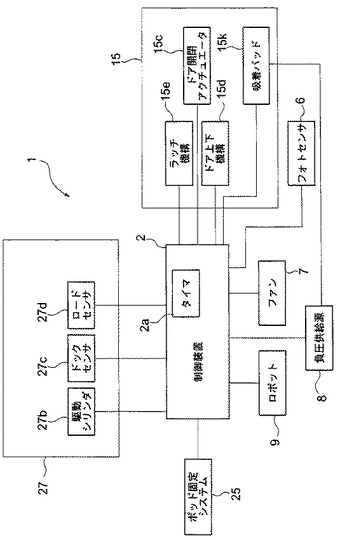
【図6】本発明の一実施形態に係るFIMSシステムの概略構成を示すブロック図である。
【図7】本発明の一実施形態に係る密閉容器たるポッドの蓋閉鎖方法を示すフローチャートである。
【図8】図1に示すロードポート装置においてドア及び第一の開口部周辺に配置される構成を拡大し、図4A等と同様の様式にて模式的に示す図である。
【図9A】図4Aに示す構成の変形例であって、蓋33がポッド31に対して正常に取り付けられた状態についてドア位置検出センサに着目してこれらを示す図である。
【図9B】図9Aと同様の様式によって、蓋33がポッド31に対して正常に取り付けられない状態を示す図である。
【発明を実施するための形態】
【0016】
本発明の一実施形態について、以下に図面を参照して説明する。図1は、本発明の一実施形態に係るFIMSシステム1の概略構成を示す該システムの側断面図であり、図2は、該システム1におけるポッド載置部、ドア、ポッド、及び蓋等を同様の様式にて拡大して示した図である。また、図3Aはポッドの開口を蓋が閉鎖した状態での、ポッド載置部、ドア等を模式的に示す図である。また、図4Aは図1に示す構成においてドア周辺に構成を拡大して示す図であって、ドアが蓋を正常な状態でポッド開口を閉鎖させた状態を示し、図4Bは同じ構成において蓋が非正常な状態でポッド開口に押し付けられた状態を示している。図5Aは図4Aに示す状態について、対象となる構成をポッド及びドッキングプレート駆動システムにまで拡大して示す図である。また、図5Bは図4Bに対応する図である。
【0017】
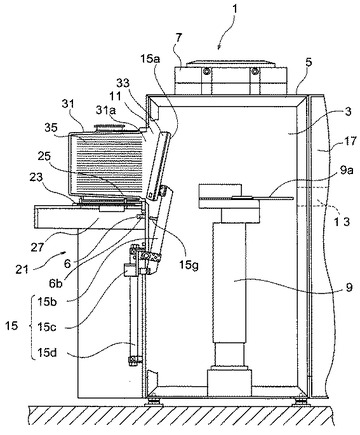
FIMSシステム1は、微小空間3を構成する筐体5及び筐体5に隣接して配置されるポッド載置部21を有する。筐体5は、更にファン7、ロボット9、第一の開口部11、第二の開口部13、ドアシステム15を有する。ファン7は筐体5によって微小空間3の上部に配置され、筐体5の外部空間に存在する気体を微小空間内部に導入する。筐体5の下部には気流が流出可能となるような構造が配置されており、微小空間3内部で発生する粉塵等は当該気流に運ばれて筐体5の下部から外部空間に排出される。ロボット9におけるロボットアーム9aは、第一の開口部11及び第二の開口部13を介して微小空間の外部に突出可能となっている。第一の開口部11はドアシステム15におけるドア15aにより一見閉鎖状態をされるが、ドア15aの外周と第一の開口部11の内周面との間には隙間が形成されることから、当該ドア15aは第一の開口部11を略閉鎖可能となっていると述べる。また、後述するように、当該略閉鎖位置において、ドア15aはポッド31に固定された蓋33を吸着保持する、或いは蓋33をポッド31の所定位置に対して取り付ける操作を行う。第二の開口部13は、ウエハ処理装置17の内部と接続されているが、当該ウエハ処理装置17の詳細に関しては本発明と直接の関係を有さないために本明細書における説明は省略する。また、本発明の特徴として該第二の開口部13は特段の効果を呈さないことから、本発明において開口部と述べる場合には第一の開口部11を示すこととする。
【0018】
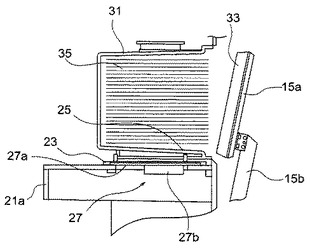
ポッド載置部21は、ドッキングプレート23、ポッド固定システム25、及びドッキングプレート駆動システム27を有する。ドッキングプレート23の上面は略平面とされており、該上面にはポッド固定システム25の一部が配置される。背景技術において説明したポッド31は、ドッキングプレート23の上面に載置され、ポッド固定システム25の当該一部、具体的にはピンがポッド31の下面に配置された不図示の被係合部と係合することによりドッキングプレート23上の所定位置に固定される。なお、ドッキングプレート23は、ポッド31を上面に載置した際に、ポッド31における開口31aが前述した第一の開口部11と正対するよう配置されている。ドッキングプレート駆動システム27は、ガイドレール27a及び駆動シリンダ27bを用いて、ドッキングプレート23と共に該所定位置に固定されたポッド31を該第一の開口部11に向かう方向及び離間する方向に駆動する。即ち、ドッキングプレート駆動手段たるドッキングプレート駆動システム27は、ポッド31を第一の開口部11に対して接近及び離間可能であって、接近時において蓋33を取り外してウエハを挿脱する第一の位置にポッド31を配置し、離間時において該ポッド31のロード及びアンロードを行う第二の位置にこれを配置する。駆動用シリンダ27bは載置台本体21aに一端部が固定されており、他端部となる伸縮するシリンダ端部がドッキングプレート23に固定されている。ドッキングプレート23はガイドレール27aに対して摺動可能に支持されており、駆動シリンダ27bのシリンダ端部の伸縮に応じてガイドレール27b上を摺動する。
【0019】
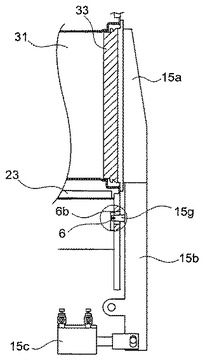
筐体5における第一の開口部11の下方であって、筐体5においてポッド載置部21と連結される領域には、後述するドア用センサドグ15gに対応してドア15aの位置を知るためのフォトセンサ6が配置される。当該フォトセンサ6は、ドアアーム15bから突出するドア用センサドグ15gを収容可能となるように、筐体5に対して設けられたセンサ用凹空間6b内に配置される。センサ用凹空間6bは、筐体5の微小空間側の壁面からポッド載置部21が配置される側の壁面に向けて穿たれており、フォトセンサ6は、センサ光が当該センサ用凹空間6bの形成方向に対して当該方向を横切るように配置される。又その場合、ポッド載置部21側(該空間の奥部分)に配置されることが好ましい。フォトセンサ6は、該ドア用センサドグ15gがある程度以上センサ用凹空間6bに進入した段階で、ドア15aが蓋33をポッド31に取り付けようとしていることを示すオン信号を一旦発する。更にドア用センサドグ15gがセンサ用凹空間6b内に進入し、蓋33がポッド31の開口31aを完全に密閉した位置に至った段階でオフ信号を発する。これにより、一対のフォトセンサと該センサ用ドグからなる簡便な構成であっても、一連の信号の変化をモニタリングすることによって蓋3の状態を確実に知ることが可能となる。なお、本形態ではフォトセンサ6とドア用センサドグ15gとからなる構成をドア位置検出センサとして用いている。しかし、当該ドア位置検出センサは、当該組み合わせに限定されず、例えば接触センサとセンサ押圧ピンとからなる組み合わせ、等、公知の種々の組み合わせから構築しても良い。また、単純に最終的な停止位置でのみオン信号を発する構成としても良い。
【0020】
ドア15aの外部空間側面(ポッド31と対向する面)には、図3に示すようにラッチ機構15eが設けられている。当該ラッチ機構15eはポッド31の蓋33の表面に設けられた不図示の被ラッチ部と係合し回転することによって、該被ラッチ部と結合された上述した係合爪をポッド31に設けられた受容孔から退避させ、或いは非係合状態にある係合爪を受容孔に進入させ、当該蓋33をポッド31に対して着脱することを可能とする。吸着パッド15kは該蓋33と当接した状態で不図示の配管を通じて負圧供給源8(図6参照)より負圧を供給することにより該蓋33を吸着し、当該蓋33をドア15aによって保持することを可能とする。ドアシステム15は、ドアアーム15b、ドア開閉アクチュエータ15c及びドア上下機構15dを有する。ドアアーム15bは棒状の部材からなり、一端においてドア15aを支持し、他端においてドア開閉アクチュエータ15cと連結されており、中間部の適当な位置において当該位置を中心に回転可能に軸支されている。ドア開閉アクチュエータ15cによって該回転中心を軸としてドアアーム15bは回転し、該ドアアーム15bの一端及びここに支持されるドア15aは第一の開口部11に対して接近或いは離間の動作を行う。ドア上下機構15dは、ドア開閉アクチュエータ15cと前述したドアアーム15bの回転軸とを支持し、上下動用アクチュエータによって上下方向に延在するガイドに沿って当該アクチュエータ及びこれに支持されるドアアーム15b及びドア15aを上下方向に駆動する。
【0021】
また、ドアアーム15bには、筐体5と対向し且つ前述したセンサ用凹空間6bに対応する配置で前述したドアセンサ用ドグ15gが設けられる。当該ドアセンサ用ドグ15gは、ドアアーム15bの延在面(ドア15aの第一の開口部11閉鎖面)に対して垂直に突出する。より詳細には、ドアセンサ用ドグ15gは、ドアアーム15bにおける回転中心とドア15aとの間に配置される。このようにドア開閉アクチュエータ15cとドア位置検知センサとを分離したことによって、従来困難であったドア15aの僅かな傾き、変位等を正確に検知することが可能となる。また、通常これらドアアーム15b等移動を繰り返す構造物は、ベアリング等の構成物の経時的変化の影響などによって基準位置が変動する恐れがある。本形態の如く、ドアアーム15bにドアセンサ用ドグ15gのみを配置し、実際の検出側のフォトセンサ6を静止物である筐体5側に配置することによって、補正が容易であると共に安定的に変位を検知可能なドア位置検知センサを得ることが可能となる。
【0022】
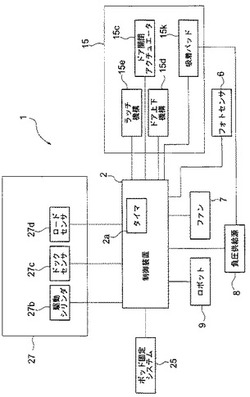
なお、図6に当該FIMSシステム1の構成をブロック図として示す。上述したファン7、ロボット9、ドアシステム15、ポッド固定システム25、及びドッキングプレート駆動システム27は、制御装置2によって各々制御される。ドアシステム15は、ラッチ機構15e、ドア開閉用アクチュエータ15c、及びドア上下機構15dを各々独立して制御可能であるが、実際上はこれら各々の構成が一連のタイムチャートに応じて動作するようにこれら構成を制御する。吸着パッド15kは、真空吸着によって蓋33を保持する蓋保持手段として作用する。なお、吸着パッド15kに対する負圧供給源8からの負圧の供給及び供給停止(負圧の破壊)の動作は、制御装置2によって行われる。ドッキングプレート駆動システム27は、駆動シリンダ27bの駆動のオンオフを行うが、当該駆動シリンダ27の動作によってドッキングプレート23が確実に所定の二位置、即ちポッド31のロード位置に存在する場合とポッド31がウエハ挿脱可能な位置であるドック位置に存在する場合とを検知する必要がある。このため、ポッド31がドッキングプレート23上の載置されたこと、及びドッキングプレート23に対してポッド31をロード・アンロードすべき位置に該ドッキングプレート23が存在することを検知するロードセンサ27dが、ドッキングプレート駆動システム27に接続されている。また、ドッキングプレート23がドック位置(ポッド31が最も第一の開口部11に接近し、内部に収容されたウエハ35の挿脱が為される位置)に存在するか否かを検知するドックセンサ27cも該ドッキングプレート駆動システム27に接続されている。当該ドックセンサ27cは当接センサから構成され、ドッキングプレート23が該前進端部から僅かに変位した際であっても、オフ信号を発してこれを制御装置2に伝達する。即ち、ドックセンサ27cは、ドッキングプレート27の前進端部からの変位に応じた信号を発し、制御装置2と協働して変位検知手段として作用する。
【0023】
次に、上述したフォトセンサ6及びドックセンサ27cがポッド31に対する蓋33の取り付け時においてどの様に動作するかを図4A、4B、5A及び5Bを参照して説明する。図4Aに示すように、通常の蓋33のポッド31への取り付け動作の場合、蓋33はポッド31に設けられた蓋33収容用の凹部内に嵌まり込み、ドア15a及びこれを支持するドアアーム15bは所定の開口部11閉鎖姿勢をとることとなる。その際、ドア用センサドグ15gはセンサ用凹空間6b内に所定の深さまで進入し、フォトセンサ6は制御装置2に対して所定のタイミングでオフ、オン、及びオフの信号を伝える。これに対し、図4Bに示すように、ポッド31の固定状態或いはドア15aによる蓋33の保持状態の不備、更にはドア15aの動作異常等によって蓋33がポッド31の収容凹部に対して傾いて押し込まれる場合がある。この場合、当該状態のままにラッチ機構15eを動作させても係合爪は受容孔に対して好適に係合しきれず、結果としてポッド搬送時の蓋33の落下等を招いてしまう。このような蓋33の取り付け状態にあるとき、ドア用センサドグ15gはセンサ用凹空間6bに対して所定の深さまで進入することができない。従って、フォトセンサ6は所定のタイミングでのオフ、オン及びオフの信号における最後のオフ信号を発することができない、或いはタイミングが異なる、等、通常とは異なる信号を発することとなる。このような信号を制御装置2において通常時の信号と比較することによって、ポッド31に対する蓋33の取り付け状態を知ることが可能となる。
【0024】
また、蓋33が傾いた状態のままでこれをポッド31に取り付けようとした場合、例えばドア15aが蓋33を押圧する力が大きい場合には、蓋33が撓む等の変形をすることも考えられる。この場合、フォトセンサ6からは蓋3が正しくポッド31に対して取り付けられたことを示す信号しか得られない。本形態では、以下の構成をさらに付加することによってこのような事態の対処を行っている。即ち、ドッキングプレート駆動システム27において駆動力を呈する駆動源をエアシリンダ等より構成し、当該駆動力をドア15aの上述した凹圧力よりも小さくなるように設定している。
【0025】
ドア15a及び蓋33が所定の状態を維持していれば、ドア15aの押圧力はポッド31、ドッキングプレート23等に作用することは基本的には無い。しかし、蓋33が傾いた状態でドア15aがこれを押圧した場合、蓋33は傾いた変位分だけ受けた押圧力をポッド31等に伝えることとなる。当該押圧力はドッキングプレート23に作用してこれを前進端部から後端部(ポッド31は当初ポッド載置部21に載置する或いはポッド載置部21から持ち運ぶ際のロード・アンロード位置)方向に押し戻すこととなる。上述した構成では、ドックセンサ27cがこの位置変化に基づいたオフ信号を制御装置2に送ることとなる。図5Aは蓋33のポッド31への取り付けが好適に行われた場合を示し、図5Bは蓋33が傾いて好適に行われなかった場合を模式的に示している。図に示しように、図5Bの場合、ポッド31に対して矢印Aの押圧力が作用し、当該押圧力によってドックセンサ27cがオフ信号を発することとなる。即ち、上述したフォトセンサ6の信号及びドックセンサ27cの信号の両者を、蓋33が正しくポッド31に挿入された場合に発せられるこれらからの信号と比較することによって、蓋33のポッド31への取り付け状態を確実に検知することが可能となる。なお、矢印Aで示される押圧力は、ドア15aが第一の開口11を閉鎖するために移動する際の駆動力と一致しており、ドア15aが第一の開口部11を略閉鎖する位置に達して停止するまで、当該押圧力は蓋33等に作用可能とされている。
【0026】
ここで、実際にウエハ処理作業を行う際の当該FIMSシステム1の動作について説明する。ウエハ処理作業において、所定枚数のウエハを収容し内部が清浄気体によって満たされたポッド31がドッキングプレート23上に載置される。ドッキングプレート23を載置する際に、ポッド固定システム25が動作してドッキングプレート23に対するポッド31の載置位置を所定のものとする。続いてドッキングプレート駆動システム27が動作し、ポッド31を第一の開口部11に向けて駆動する。具体的には、ポッド固定システム25によってドッキングプレート23と一体化されたポッド31を、ドッキングプレート23を介する様式にて駆動シリンダ27bが移動させる。その際、ドア15aは第一の開口部11を略閉鎖する位置で停止している。当該駆動動作は、ポッド31の蓋33がドア15aの当接面と当接し、ドッキングプレート23と第一の開口部11と所定の位置関係となった段階手終了する。この時、ラッチ機構15eが蓋33表面の被ラッチ部と係合され回転することによって蓋33をポッド31に対して着脱可能な状態とすると同時に、吸着パッド15kが蓋33を吸着し、蓋33がドア15aによって保持された状態となる。
【0027】
当該状態からドア開閉アクチュエータ15cが動作を開始し、ドアアーム15bが回動して蓋33を保持するドア15aを第一の開口部11から微小空間3の内部方向に運ぶ。ドアアーム15bが所定角度で回動を停止した後、ドア上下機構15dが動作を開始し、ドア開閉アクチュエータ15cと共にドア15aを下方に移動させる。当該動作によって第一の開口部11は全開状態となり、微小空間3は第一の開口部11を介してポッド31の内部と連通した状態となる。この状態においてロボット9が動作を開始し、ロボットアーム9aによってウエハ35をポッド31の内部から第二の開口部13を介してウエハ処理装置17に搬送する。また、この状態を維持して、当該ロボット9は、更にウエハ処理装置17内部において所定の処理が施されたウエハをポッド31内部へも搬送する。蓋33をポッド31に取り付け、ポッド31をFIMSシステム1より取り外し可能とする場合には、基本的にはこれら動作が逆に行われる。
【0028】
以上に述べた構成からなるロードポート装置1において、本発明の特徴について以下に詳述する。通常ポッド31をFIMSシステム1からアンロードする(ポッドを取り外し可能な状態とする。)場合には、上述したようにロード(ポッドを載置台に装着する。)時とは逆の手順で各々の構成を動作させる。このアンロードの動作において、本実施形態で制御装置2によって為される当該動作を、図6のフローチャートに示す。具体的には、ドアシステム15を動作させ、ドック位置に停止中のポッド31の開口31aに対して蓋33を取付ける(S1)。当該蓋33の取り付け動作の際に、上述したフォトセンサ6からなるドア位置検出センサより所定のタイミングにてオフ、オン、オフの信号が制御装置2に送られる。また、ドックセンサ27cからは制御装置2に対してドッキングプレートが前進端部に存在するか否かを示す信号が送られる(S2)。続いて、制御装置2ではこれらの信号と通常の信号との比較が為される(S3)。その際、ドア位置が適切でない、或いはドッキングプレートが前進端部より変位した、といった結果が得られ場合には、制御装置2は異常を示す情報を発して装置を停止させる(S4)。
【0029】
何れのセンサから得られた信号よりも問題が無いと判定された場合には、ラッチ機構15eの動作が行われ、蓋33のポッド31の固定が行われる(S5)。通常、この固定操作を行ってもドアの位置及びドッキングプレートの位置は変化しない。しかし、例えばドアが僅かに変形することによって、見かけ上ドア位置検出センサ上でもドックセンサ27c上でも異常が検知されない場合も考えられる。このような場合、ラッチ機構15eによる係合爪の突き出し操作によって蓋33が正常の位置に戻る場合と、係合爪が受容孔に収まり得ずにこの段階でドア或いはドッキングプレートの停止位置を変位させることも考えられる。そこで本実施形態では、この段階で再度ドア位置検出センサ及びドックセンサ27cからの信号の判定が制御装置2によって行われる(S6及びS7)。その際、ドア位置が適切でない、或いはドッキングプレートが前進端部より変位した、といった結果が得られた場合には、制御装置2は異常を示す情報を発して装置を停止させる(S8)。何れのセンサから得られた信号よりも問題が無いと判定された場合には、ドア15aによる蓋33の保持が解除され(S9)、ドッキングプレート駆動システム27によるポッド31のアンロード位置への移動が行われる。以上の制御装置2による動作を実施することによって、蓋33をポッド31に対して正確且つ確実に固定することが可能となる。なお、上述の形態では係合爪が受容孔に収まらず且つ蓋自身の微小変形によってドア及びドッキングプレートの位置が所定位置に存在している場合も可能性としては考えられる。この場合、上述した操作に、更にラッチ機構15eの動作の適否を判別する信号を得られる構成とし、当該信号も判定対象とすることによって蓋33の状態をより確実に判定することが可能となる。
【0030】
以上に述べた本発明に係るポッドの蓋閉鎖方法を実施することによって、ポッドに対して蓋か好適に固定されているか否かを簡便且つ確実に知ることが可能となる。また、従来装置に対してドア位置検知センサを配し、且つ当該センサ及びドックセンサからの信号のオンオフを判定するステップ、当該判定結果に応じて再度蓋の固定操作を行うステップを、従来装置における動作フローに付加することだけでも、本発明の実施が可能となるという効果も得られる。また、ポッドに対して特に新たな構成を付加する必要が無く、従来のポッドをそのまま用いて本発明を実施することも可能となる。
【0031】
なお、上述した実施形態においては、ドッキングプレート23等の変位を検知する変位検知手段として、ドックセンサ27cを用いることとしている。しかしながら、ポッドの形状、例えば開口面が突き出す形状の場合には、前述したドックセンサ27cでは、配置上適切に変位を検地できない場合も考えられる。この場合、前述したドックセンサの信号のみならず、ドッキングプレートがある程度ドック位置から移動したことを検知するために配置される不図示の所謂アンドックセンサから信号を併用して用いることとしても良い。ドックセンサ及びアンドックセンサからの二つの位置信号を用いることによって、用いるポッドに応じて特定区間の変位により蓋の固定状態を判定することが可能となる。従って、ポッドの形状に依存することなく、蓋とポッドとの固定状態を知ることが可能となる。
【0032】
また、微小な変位を検知することによって、駆動シリンダ27bの荷重負荷の解除に伴う動作を極力小さくし、当該動作にともなる所謂ロスタイムを低減することが求められる場合も考えられる。更に、ポッドによってはポッド31に対する蓋33の固定が弾性部材を介して為されている場合もあり、この場合、実際上ドッキングプレート23等が当該弾性部材の変形量以上の変位を呈さない場合には蓋33の固定状態の適否を判別できない可能性がある。これらの場合、駆動シリンダ27bに変えて所謂サーボモータを駆動源として用いることが好ましい。当該構成の付加によって装置構成を改変する必要性が生じる半面、ドッキングプレート等の変位をサーボモータに付加されたエンコーダによって検知することで、検知に要する変位を更に小さくすることが可能となる。また、サーボモータとしてトルク管理が可能なものを用いることとし、ドッキングプレートの一時的な移動の際のトルク変化を予め得ておき、当該トルク変化と実際に得られるトルクとの相違から蓋の固定状態を知ることとしても良い。即ち、制御手段中にメモリ及び比較回路を配置することとし、通常のトルク変動をメモリに格納しておき、実際に得られるトルク変動をメモリに格納されたトルク変動と比較回路にて比較し、当該比較の結果相違点が閾値を超えた場合に蓋が適切に工程さていないと判定する。以上の操作が上述したS3或いはS7にて為されることとなる。この場合、事実上変位が存在しない場合であっても、蓋の固定状態を検知することが可能となる。なお、本発明においては、このようなトルク変化も含めてポッドの変位として定義することとし、上述したドックセンサ、アンドックセンサ、エンコーダ、トルク変化の検知機構、及びこれらに付随するタイマ等の構成を含め、変位検知手段として定義することとする。このような変位検知手段を用いることによって、ポッドの形状によらず、蓋の固定状態の適否を検知することが可能となる。なお、当該変位検知手段としては、光電センサ等ポッドの実際の変位を求める構成によっても構築可能である。即ち、本発明における変位検知手段は、ドッキングプレート或いはポッドの微小変位、或いはこれら両者或いは何れかに付加される荷重トルク変化を検知可能な種々の構成に置き換えることが可能である。
【0033】
なお、上記実施形態においては、蓋をポッドに固定する固定手段として蓋側に配置される係合爪とポッド側に配置される受容孔とからなる構成を例示している。しかしながら、本発明における蓋とポッドとを一体化させて固定する固定手段は当該形態に限定されず、係合爪と受容孔との配置を各々入れ替えても良く、更にこれらとは異なる様式からなる固定手段であって、外部からの操作によって固定、解除を実施可能な種々の構成を用いることとしても良い。また、蓋保持手段として吸着パッドを用いることとしているが、当該様式のみならず所謂ラッチによる保持等、種々の構成を用いることが可能である。なお、他の構成を用いる場合には、前述した駆動シリンダから供給される駆動力との間において、蓋の固定状態を判定する際の操作において、駆動力<保持力の関係を満たすようにドッキングプレート駆動手段及び蓋保持手段の構成を選択することが求められる。
【0034】
図4A及び図4Bに示したとおり、ここまでは、フォトセンサ6を筐体に固定し、ドア用センサドグ15gがドアアーム15bとともに可動な例を説明した。逆に、フォトセンサ6をドアアーム15bとともに可動とする変形も可能である。以下、この変形例について、図9Aおよび図9Bを参照して説明する。図9A及び図9Bは、それぞれ図4A及び図4Bに示される構成の変形例を示している。ドアアーム15bは、回転中心となる軸15i周りに回動可能に、支持部材15hに枢支される。支持部材15hは、ドア開閉アクチュエータ15cに固定され、ドア開閉アクチュエータ15cからドアアーム15bの壁部をドアアーム15bの内部に向かって貫通して水平に突出している。支持部材15hは、ドア開閉アクチュエータ15cと共に昇降する。ドア開閉アクチュエータ15cから突出可能に延出するロッド15jが、軸15iに対してドア15aと反対側となる端部に連結される。ロッド15jが突出すると、ドアアーム15bは回転中心となる軸15i周りにドア15aを閉鎖するように回動し、一方、ロッド15jが引き込まれると、ドアアーム15bは回転中心となる軸15i周りにドア15aを開放するように回動する。フォトセンサ6は、ドアアーム15bの内壁部に、取り付け部材を介して取り付けられる。すなわち、フォトセンサ6は受光部と発光部を備え、フォトセンサ6の発光部から発せられる光が、受光部に入射するように、フォトセンサ6は、ドアアーム15bに対して固定される。これにより、フォトセンサ6は、ドアアーム15bの回動動作に併せて、可動である。すなわち、ドア15aの開閉動作の際に、フォトセンサ6はドア15aを支持するドアアーム15bの回転中心を軸とした回動に併せて回動する。また、この例では、ドア用センサドグ15gは、ドアアーム15bを枢支する支持部材15hに対して固定される。たとえば、ドア用センサドグ15gは、ドア開閉アクチュエータ15cから支持部材15hと、ドアアーム15bの内部において、フォトセンサ6に向かって上方に突出するように一体的に結合される。
【0035】
本実施形態ではフォトセンサ6とドア用センサドグ15gとからなる構成をドア位置検出センサとして用いている。ドア用センサドグ15gは以下の3つの状態を満たすようにドア開閉アクチュエータ15cに固定される。まず、ドア15aに保持された蓋33がポッド31を閉鎖していない第1の状態では、ドア用センサドグ15gはフォトセンサ6の受光部への光を遮らず、フォトセンサ6は制御装置2に対してオフの信号を伝えている。次に、図9Aに示すように、通常の蓋33のポッド31への取り付け動作の際に、フォトセンサ6がドアアーム15bの回動に併せて移動し、蓋33が所定の状態でポッド31を閉鎖した第2の状態では、ドア用センサドグ15gはフォトセンサ6の受光部への光を遮り、フォトセンサ6は制御装置2に対してオンの信号を伝える。なお、所定の状態とは、例えば、蓋33がポッド31の開口31aを正しい姿勢で閉鎖している状態をいう。一方、図9Bに示すように、ポッド31の固定状態或いはドア15aによる蓋33の保持状態の不備、更にはドア15aの動作異常等によって、蓋33がポッド31の収容凹部に対して傾いて押し込まれる場合がある。この場合、蓋33は正しい姿勢でポッド31の開口31aを閉鎖していない状態であり、当該状態のままにラッチ機構15eを動作させても係合爪は受容孔に対して好適に係合しきれず、結果としてポッド搬送時の蓋33の落下等を招いてしまう。上で述べたように、蓋33が所定の状態以外でポッド31を閉鎖した第3の状態では、ドア用センサドグ15gはフォトセンサ6の受光部への光を遮らず、フォトセンサ6は制御装置2に対してオフの信号を発したままとなる。なお、上記において、蓋33が所定の状態でポッド31を閉鎖した際に発せられる信号をオンの信号とよぶ。これ以外の状態では、蓋33は閉鎖されていないか、または蓋33は異常な状態でポッド31を閉鎖しており、この状態における信号をオフの信号とよぶ。従って、蓋33が所定の状態で前記開口31aを閉鎖した際にのみ、該ドア用センサドグ15gが前記フォトセンサ6の受光部への光を遮り、ドア用センサドグ15gがフォトセンサ6の受光部への光を遮るか否かに伴ってフォトセンサ6は発する信号を変化させることが可能となる。蓋33がポッド31の開口31aを閉鎖する動作を行った後に、フォトセンサ6から発せられる信号の状態(オンの信号またはオフの信号)が制御装置2によって判定される。すなわち、ドア15aが開口部11を閉鎖する位置に存在することを制御装置2によって判定する。また、オンの信号が発せられているときのみ、ラッチ機構15eを動作させる。一方、オフの信号が発せられているときは、ラッチ機構15eを動作させない。すなわち、蓋33がポッド31の開口31aを正しく閉鎖している状態でのみ、ラッチ機構15eを動作させれば、係合爪を受容孔に対して正しく係合させる確率が高くなる。上述したように本実施形態においても、ラッチ機構15eを動作させて蓋33をポッド31に対して固定する動作を行った後に、フォトセンサ6がオンの信号を発したままであるかを制御装置2によって再度判定する(図7のS6及びS7)。すなわちラッチ機構15eの動作によってもドア15aが変位せずに、ドア15aが開口部11を閉鎖する位置に存在することを、制御装置2によって判定する。この判定は、ラッチ機構15eが正常に動作したにもかかわらず、蓋33の係合爪がポッド31の受容孔に正しく係合されていないような問題が発生していないか確認するために実行される。蓋33がポッド31の開口31aを閉鎖していないか、または異常な状態で閉鎖している状態では、ラッチ機構15eを動作させることはなく、蓋33がポッド31の開口31aを正しく閉鎖するために必要な処置を実行することが出来る。従って、フォトセンサとセンサ用ドグからなる簡便な構成であっても、ドア用センサドグ15gがフォトセンサ6の受光部への光を遮るか否かに応じて、フォトセンサ6が発する信号を変化させ、その信号の変化をモニタリングすることによってポッド31に対する蓋33の取り付け状態を知ることが可能となる。
【0036】
また、フォトセンサ6の発光部または受光部のいずれかをドアアーム15bに対して固定してドアアーム15bの回動に併せて可動とし、他方をドア用センサドグ15gと同様に、ドアアーム15bを回転中心となる軸15iまわりに枢支する支持部材15hに対して固定する構成を採用することも出来る。この構成により、蓋33が所定の状態でポッド31の開口31aを閉鎖した際にのみ、フォトセンサ6において、発光部からの光が受光部に入射し、オンの信号が発せられ、ラッチ機構15eを動作させることが出来る。この場合、ドア用センサドグ15gは必要なくなる。
【0037】
また、上述した実施形態では、ドア位置検知センサが、ドアアーム15bと、微小空間を画定する筐体5における開口部11の形成面5aと、に分かれて配置される構成を示している。しかしながら、ドア位置検知センサは何れか一方の側に配置することとしても良い。当該形態であってドアアーム側に当該ドア位置検知センサを配置した一例を図8に示す。図8は4A等と同様の様式にてドア15aがまだ第一の開口部11を閉鎖していない状態を示す。本形態では、第一の開口部11が形成される筐体壁5aと対向するドアアーム15bの表面に、所謂プランジャタイプの可動式センサ36が配置される。当該可動式センサ36は、前述したドアアーム15b表面に形成されたドア側凹部36aと、可動ドグ36bと、バネ等弾性部材からなる付勢手段36cと、可動ドグ検知センサ36dと、ドグ位置規制手段36aと、を有する。可動ドグ36bはドアアーム15b表面に垂直な方向に延在し、当該方向に沿って配置されるピン状の部材からなる。付勢手段36cは、ドア側凹部36a内部に収容されて、一方の端部が該ドア側凹部36aの内壁に当接し、他方の端部が可動ドグ36bと当接する。ドグ位置規制手段36eは、可動ドグ36bの先端部が貫通可能な貫通穴を有する。また、ドア側凹部36aの開口部を閉鎖すると共に可動ドグ36bの軸方向移動に伴ってその一部と当接することによって、可動ドグ36bのドアアーム15b表面からの突き出し量を規制する。前述した付勢手段36cが可動ドグ36bに対して筐体壁5a方向に付勢力を与えることによって、可動ドグ36bはドグ位置規制手段36eとその一部が当接して所定量が突き出した状態を維持する。ドア15aが第一の開口部11を略閉鎖する位置に至ると、可動ドグ36bは対応する筐体壁5aとその先端部(筐体壁5aと対向する端部)が当接し、突き出し量を減少させてドア側凹部36a内に押し込められる。ドア側凹部36aの底部には例えば接触センサ、フォトセンサ等より構成される可動ドグ検知センサ36dが配置されている。従って、ドア側凹部36a内に押し込められた可動ドグ36bの後端部の存在或いはその移動量に応じて、ドア15aの位置に対応した信号を発する。当該構成とすることにより、ドア位置検知センサに関連する構成をドアシステム15にのみ配することとなり。現状のFIMSシステムに対しての適用が容易に実施可能となる。
【0038】
なお、図4A等或いは図8に示す形態に置いて、ドア位置検知センサの配置はドアアーム15bにおける回転動作の回転中心側ではなく、ドア15aとの接合部に近接する領域に配置されることが好ましい。より具体的には、ドア15aに近接し筐体壁5aの微小空間3側の領域と対向する領域、更には、該筐体壁5aの外部空間側のドッキングプレート駆動システム27が配置される領域と対応する微小空間3側の領域に配置されることが好ましい。当該領域はドア15aの回転動作及び上下動作に緩衝しない空間に対応し、センサ、凹部等を配置することが容易であり、従来の構成に対してFIMSの清浄度維持の観点からその影響を最も低く抑えられると考えられる。また、ドア15aの第一の開口部11の閉鎖動作に影響しない領域であって、ドアアーム15bの回転中心から最も離れ且つ設置可能な領域にドア位置検知センサを配置することとなり、ドア15aの変位を拡大して検知することとなる。従ってドアの姿勢、或いはその変化を高精度で検出することが可能となる。
【0039】
また、本発明はウエハを対象とするFIMSシステムに関して主として述べている。しかしながら、本発明の適用対象は該システムに限定されず、例えばディスプレイ用のパネル、光ディスク等を収容する密閉容器等に対しても適用可能である。
【符号の説明】
【0040】
1:ロードポート装置、 2:制御装置、 3:微小空間、 5:筐体、 フォトセンサ6、 7:ファン、 8:負圧供給源 9:ロボット、 11:第一の開口部、 13:第二の開口部、 15:ドアシステム、 17:ウエハ処理装置、 21:ポッド載置部、 23:ドッキングプレート、 25:ポッド固定システム、 27:ドッキングプレート駆動システム、 31:ポッド、 33:蓋、 35:ウエハ、 36:可動式センサ
【技術分野】
【0001】
本発明は、半導体製造プロセス等において、ポッドと呼ばれる搬送容器に内部保持されたウエハを半導体処理装置間にて移送する際に用いられる、所謂FIMS(Front-Opening Interface Mechanical Standard)システムに関する。より詳細には、ウエハを収容する密閉容器たる所謂FOUP(Front-Opening Unified Pod)と呼ばれるポッドが載置され、当該ポッドの蓋を開閉して該ポッドに対するウエハの移載を行うFIMSシステムにおいて、蓋が取り外された状態にあるポッドに対して該蓋を固定してポッド開口を閉鎖する方法、及び当該方法を好適に実施する蓋開閉システムに関する。
【背景技術】
【0002】
以前、半導体製造プロセスは、半導体ウエハを取り扱う部屋内部を高清浄化した所謂クリーンルーム内において行われていた。しかしウエハサイズの大型化への対処とクリーンルームの管理に要するコスト削減の観点から、近年では処理装置内部、ポッド(ウエハの収容容器)、及び当該ポッドから処理装置への基板受け渡しを行う微小空間のみを高清浄状態に保つ手法が採用されるに至っている。
【0003】
ポッドは、その内部に複数のウエハを平行且つ隔置した状態で保持可能な棚と、外面を構成する面の一つにウエハ出し入れに用いられる開口とを有する略立方体形状を有する本体である密閉容器と、その開口を閉鎖する蓋とから構成される。この開口が形成されている面がポッドの底面ではなく一側面(微小空間に対して正対する面)に位置するポッドは、FOUP(front-opening unified pod)と総称され、本発明はこのFOUPを用いる構成を主たる対象としている。
【0004】
上述した微小空間は、ポッドの開口と向かい合う第一の開口部と、第一の開口部を閉鎖するドアと、半導体処理装置側に設けられた処理装置側の開口部と、第一の開口部からポッド内部に侵入してウエハを保持すると共に該処理装置側の開口部を通過して処理装置側にウエハを搬送する移載ロボットとを有している。微小空間を形成する構成は、同時にドア正面にポッド開口部が正対するようポッドを支持する載置台を有している。
【0005】
載置台上面には、ポッド下面に設けられた位置決め用の穴に嵌合されてポッドの載置位置を規定する位置決めピンと、ポッド下面に設けられた被クランプ部と係合してポッドを載置台に対して固定するクランプユニットとが配置されている。通常、載置台はドア方向に対して所定距離の前後移動が可能となっている。ポッド内のウエハを処理装置に移載する際には、ポッドが載置された状態でポッドの蓋がドアと接触するまでポッドを移動させ、接触後にドアによってポッド開口部からその蓋が取り除かれる(特許文献1参照)。これら操作によって、ポッド内部と処理装置内部とが微小空間を介して連通することとなり、以降ウエハの移載操作が繰り返して行われる。この載置台、ドア、第一の開口部、ドアの開閉機構、第一の開口部が構成された微小空間の一部を構成する壁等を含めて、FIMS(front-opening interface mechanical standard)システムと総称される。
【先行技術文献】
【特許文献】
【0006】
【特許文献1】特開平11−288991号公報
【特許文献2】特開2001−077177号公報
【発明の概要】
【発明が解決しようとする課題】
【0007】
当該ポッドの蓋には、特許文献2に詳細に開示されるように蓋外周から外方方向に伸縮可能な係合爪が配され、ポッド側には当該係合爪に応じた位置に該係合爪が係合する受容孔が設けられる。これら係合爪及び受容孔は蓋をポッドに固定する係合手段として作用する。従来構成では、当該爪の伸縮によってポッド−蓋の係合及び解除の各々の状態を得ることとしている。例えば、ポッド開口を当該蓋によって閉鎖する場合、開口と蓋との間の異物の存在、或いは載置台上のポッドの位置精度、ドアの動作精度等の誤差の積算による位置ずれによって、蓋に配された爪がポッド側の受容孔に正確に挿入されない場合がある。この場合、ポッド開口が蓋によって完全に閉鎖されたと認識されてしまうと、ポッドの移動等の操作が続けて実行されてしまい、搬送中等において蓋がポッドから外れてしまう可能性がある。現在は、当該状況への対処として、特許文献2に開示されるように、爪の状態を検出するセンサを配して、当該爪の正常位置からの変位を検出することで確実な閉鎖の可否を知る方法が検討されている。
【0008】
従来のポッドサイズにおいては、蓋、ポッド側の受容孔及び爪の突き出し部分各々のサイズの関係から、蓋による閉鎖不良自体がそれほど生ずる可能性があるものではなかった。また、爪の動作を検知することも比較的容易であり、爪を動作させる機構からの異常検知によって閉鎖状態の適否を知ることも可能であった。しかしながら、昨今のウエハサイズの大径化によりポッドが大型化したことによって、ポッドサイズに対する爪の係合部分のサイズが相対的に小型化せざるを得なくなったことから、閉鎖不良が生じる可能性の増加、或いは閉鎖不良が生じても爪の動作上は異常が検地され得ない自体が生じる可能性の発現が考えられる。更に、現在汎用されているポッドにはこのような爪の検知機構は配されておらず、実際に当該方法を提供しようとするとポッドを全て交換する或いは改造する必要がある。また、ポッドの形状等に依存して、当該機構を配すること自体が困難な場合も考えられる。
【0009】
本発明は以上の状況に鑑みて為されたものであり、ポッドに対して蓋を取付けて開口を閉鎖する動作において、蓋がポッドに対して確実に係合した状態に在ることを検知し、当該検知の後にポッドのFIMSからの離脱を可能とする密閉容器の蓋閉鎖方法、及び当該方法に供せられる密閉容器の蓋開閉システムの提供を目的としている。
【課題を解決するための手段】
【0010】
上記課題を解決するために、本発明に係る蓋閉鎖方法は、蓋と蓋により閉鎖される開口を一側面に有すると共に内部に被収容物を収容可能な密閉容器に対して蓋を開閉して密閉容器内部への被収容物の挿脱を可能とする蓋開閉システムにおいて、蓋により開口を閉鎖する蓋閉鎖方法であって、蓋及び密閉容器は蓋或いは密閉容器の外部からの操作によって蓋を密閉容器に対して固定する係合手段を有し、蓋開閉システムは、開口部を有する微小空間と、開口部を略閉鎖する位置と開放する位置との間で移動可能であって、蓋を保持する蓋保持手段を有するドアと、開口部に対して開口が正対するように密閉容器を載置可能であると共に、密閉容器と共に開口部に対して接近及び離間可能であって、接近時において蓋を取り外して被収容物を挿脱する第一の位置に密閉容器を配置し、離間時において密閉容器のロード及びアンロードを行う第二の位置に密閉容器を配置するドッキングプレートと、ドッキングプレートの接近及び離間の動作を為すドッキングプレート駆動手段と、を有し、ドアにより前記開口を閉鎖する位置に前記蓋を移動させ、ドアが開口部を略閉鎖する位置に存在すること、及びドッキングプレートが第一の位置に存在することを判定し、係合手段によって蓋を密閉容器に固定し、ドアが開口部を略閉鎖する位置に存在すること、及びドッキングプレートが第一の位置に存在することを判定する、工程を有することを特徴としている。
【0011】
上述した蓋閉鎖方法あっては、ドッキングプレート駆動手段はシリンダ機構からなる駆動手段であって、ドッキングプレート駆動手段によるドッキングプレートの駆動力は、ドアが開口部を略閉鎖するために移動される際の駆動力よりも小さく設定されることが好ましい。また、ドアは、ドアを一方の端部に支持するドアアームと、ドアアームの他方の端部に連結されてドアアームを駆動するドア開閉アクチュエータと、ドア及びドア開閉アクチュエータの間においてドアアームを回転可能に軸支する回転中心とによって回動可能に支持され、ドアが開口部を略閉鎖する位置に存在するか否かの判定は、ドアアームにおける回転中心とドアとの間に配置されるドア位置検知センサから得られる信号に基づくことが好ましい。更に、ドア位置検知センサは、微小空間を画定する筐体における開口部が形成される面に対向するドアアームの表面に配置されるドア側凹部と、ドア側凹部に収容されて先端部をドアアーム表面より突出させる可動ドグと、ドア側凹部に収容されて可動ドグに対して突出方向の付勢力を与える付勢手段と、可動ドグの停止位置に応じて可動ドグのドアアーム表面からの突出量に対応した信号を発する可動ドグ位置検出センサと、を有することが好ましい。或いは、ドア位置検知センサは、ドアアームから突出するドア用センサドグと、微小空間を画定する筐体に設けられてドア用センサドグが進入可能な凹部であるセンサ用凹空間に配置されるフォトセンサと、からなり、センサドグのセンサ用凹空間への進入に伴って二段階に変化する信号を発することがより好ましい。
【0012】
また、上記課題を解決するために、本発明に係る蓋開閉システムは、蓋と蓋により閉鎖される開口を一側面に有すると共に内部に被収容物を収容可能な密閉容器に対して蓋を開閉して密閉容器内部への被収容物の挿脱を可能とする蓋開閉システムであって、蓋及び密閉容器は蓋或いは密閉容器の外部からの操作によって蓋を密閉容器に対して固定する係合手段を有し、蓋開閉システムは、第一の開口部を有する微小空間と、開口部を略閉鎖する位置と開放する位置との間で移動可能であって、蓋を保持する蓋保持手段を有するドアと、開口部に対して開口が正対するように密閉容器を載置可能であると共に、密閉容器と共に開口部に対して接近及び離間可能であって、接近時において蓋を取り外して被収容物を挿脱する位置に密閉容器を配置し、離間時において密閉容器のロード及びアンロードを行う位置に密閉容器を配置するドッキングプレートと、ドッキングプレートの前記接近及び離間の動作を為すドッキングプレート駆動手段と、ドッキングプレートが前記接近時の位置から変位したことを検知する変位検知手段と、ドアが開口部を略閉鎖する位置に存在するか否かに応じた信号を発するドア位置検知センサと、を有することを特徴としている。
【0013】
なお、上述した蓋開閉システムにあっては、ドッキングプレート駆動手段はシリンダ機構からなる駆動手段であって、ドッキングプレート駆動手段によるドッキングプレートの駆動力は、ドアが開口部を略閉鎖するために移動される際の駆動力よりも小さく設定されることが好ましい。
【発明の効果】
【0014】
本発明によれば、ポッドサイズ等によらず、蓋の爪がポッド本体と係合しているか否かを確実に知ることが可能となる。従って、搬送時において蓋の脱落等が生じる可能性なくすることができ、ポッドの搬送速度をより早くすること等、ポッド搬送系の操作条件、或いは搬送系自体の選択肢を大きくすることが可能となる。また、基本的にはポッド側に何ら特別な機構を配する必要が無いことから、従来のポッド等をそのまま用いることが可能となり、装置使用者に対した新たなコスト負担を生じさせることが無い。また、本発明によれば、従来装置に対してドアの停止位置を検知するセンサを付加し、当該センサ及び後述するドックセンサ等から得られる信号を用いることによっても、制御上のフローを修正することで簡便な蓋の固定状況の検知を実施することが可能となる。従って、従来装置のハード上の構成を殆ど改変することなく、本発明を実施することが可能となる。
【図面の簡単な説明】
【0015】
【図1】本発明の一実施形態に係るロードポート装置の概略構成を示す側断面図である。
【図2】本発明の一実施形態に係るロードポート装置の主要部概略構成を図1と同様の様式にて示す拡大側断面図である。
【図3】図1に示すロードポート装置においてドア及び第一の開口部周辺に配置される構成を拡大して模式的に示す図である。
【図4A】図1に示す構成において蓋33がポッド31に対して正常に取り付けられた状態についてドア位置検出センサに着目してこれらを示す図である。
【図4B】図4Aと同様の様式によって、蓋33がポッド31に対して正常に取り付けられない状態を示す図である。
【図5A】図1に示す構成において蓋33がポッド31に対して正常に取り付けられた状態についてドックセンサに着目してこれらを示す図である。
【図5B】図5Aと同様の様式によって、蓋33がポッド31に対して正常に取り付けられない状態を示す図である。
【図6】本発明の一実施形態に係るFIMSシステムの概略構成を示すブロック図である。
【図7】本発明の一実施形態に係る密閉容器たるポッドの蓋閉鎖方法を示すフローチャートである。
【図8】図1に示すロードポート装置においてドア及び第一の開口部周辺に配置される構成を拡大し、図4A等と同様の様式にて模式的に示す図である。
【図9A】図4Aに示す構成の変形例であって、蓋33がポッド31に対して正常に取り付けられた状態についてドア位置検出センサに着目してこれらを示す図である。
【図9B】図9Aと同様の様式によって、蓋33がポッド31に対して正常に取り付けられない状態を示す図である。
【発明を実施するための形態】
【0016】
本発明の一実施形態について、以下に図面を参照して説明する。図1は、本発明の一実施形態に係るFIMSシステム1の概略構成を示す該システムの側断面図であり、図2は、該システム1におけるポッド載置部、ドア、ポッド、及び蓋等を同様の様式にて拡大して示した図である。また、図3Aはポッドの開口を蓋が閉鎖した状態での、ポッド載置部、ドア等を模式的に示す図である。また、図4Aは図1に示す構成においてドア周辺に構成を拡大して示す図であって、ドアが蓋を正常な状態でポッド開口を閉鎖させた状態を示し、図4Bは同じ構成において蓋が非正常な状態でポッド開口に押し付けられた状態を示している。図5Aは図4Aに示す状態について、対象となる構成をポッド及びドッキングプレート駆動システムにまで拡大して示す図である。また、図5Bは図4Bに対応する図である。
【0017】
FIMSシステム1は、微小空間3を構成する筐体5及び筐体5に隣接して配置されるポッド載置部21を有する。筐体5は、更にファン7、ロボット9、第一の開口部11、第二の開口部13、ドアシステム15を有する。ファン7は筐体5によって微小空間3の上部に配置され、筐体5の外部空間に存在する気体を微小空間内部に導入する。筐体5の下部には気流が流出可能となるような構造が配置されており、微小空間3内部で発生する粉塵等は当該気流に運ばれて筐体5の下部から外部空間に排出される。ロボット9におけるロボットアーム9aは、第一の開口部11及び第二の開口部13を介して微小空間の外部に突出可能となっている。第一の開口部11はドアシステム15におけるドア15aにより一見閉鎖状態をされるが、ドア15aの外周と第一の開口部11の内周面との間には隙間が形成されることから、当該ドア15aは第一の開口部11を略閉鎖可能となっていると述べる。また、後述するように、当該略閉鎖位置において、ドア15aはポッド31に固定された蓋33を吸着保持する、或いは蓋33をポッド31の所定位置に対して取り付ける操作を行う。第二の開口部13は、ウエハ処理装置17の内部と接続されているが、当該ウエハ処理装置17の詳細に関しては本発明と直接の関係を有さないために本明細書における説明は省略する。また、本発明の特徴として該第二の開口部13は特段の効果を呈さないことから、本発明において開口部と述べる場合には第一の開口部11を示すこととする。
【0018】
ポッド載置部21は、ドッキングプレート23、ポッド固定システム25、及びドッキングプレート駆動システム27を有する。ドッキングプレート23の上面は略平面とされており、該上面にはポッド固定システム25の一部が配置される。背景技術において説明したポッド31は、ドッキングプレート23の上面に載置され、ポッド固定システム25の当該一部、具体的にはピンがポッド31の下面に配置された不図示の被係合部と係合することによりドッキングプレート23上の所定位置に固定される。なお、ドッキングプレート23は、ポッド31を上面に載置した際に、ポッド31における開口31aが前述した第一の開口部11と正対するよう配置されている。ドッキングプレート駆動システム27は、ガイドレール27a及び駆動シリンダ27bを用いて、ドッキングプレート23と共に該所定位置に固定されたポッド31を該第一の開口部11に向かう方向及び離間する方向に駆動する。即ち、ドッキングプレート駆動手段たるドッキングプレート駆動システム27は、ポッド31を第一の開口部11に対して接近及び離間可能であって、接近時において蓋33を取り外してウエハを挿脱する第一の位置にポッド31を配置し、離間時において該ポッド31のロード及びアンロードを行う第二の位置にこれを配置する。駆動用シリンダ27bは載置台本体21aに一端部が固定されており、他端部となる伸縮するシリンダ端部がドッキングプレート23に固定されている。ドッキングプレート23はガイドレール27aに対して摺動可能に支持されており、駆動シリンダ27bのシリンダ端部の伸縮に応じてガイドレール27b上を摺動する。
【0019】
筐体5における第一の開口部11の下方であって、筐体5においてポッド載置部21と連結される領域には、後述するドア用センサドグ15gに対応してドア15aの位置を知るためのフォトセンサ6が配置される。当該フォトセンサ6は、ドアアーム15bから突出するドア用センサドグ15gを収容可能となるように、筐体5に対して設けられたセンサ用凹空間6b内に配置される。センサ用凹空間6bは、筐体5の微小空間側の壁面からポッド載置部21が配置される側の壁面に向けて穿たれており、フォトセンサ6は、センサ光が当該センサ用凹空間6bの形成方向に対して当該方向を横切るように配置される。又その場合、ポッド載置部21側(該空間の奥部分)に配置されることが好ましい。フォトセンサ6は、該ドア用センサドグ15gがある程度以上センサ用凹空間6bに進入した段階で、ドア15aが蓋33をポッド31に取り付けようとしていることを示すオン信号を一旦発する。更にドア用センサドグ15gがセンサ用凹空間6b内に進入し、蓋33がポッド31の開口31aを完全に密閉した位置に至った段階でオフ信号を発する。これにより、一対のフォトセンサと該センサ用ドグからなる簡便な構成であっても、一連の信号の変化をモニタリングすることによって蓋3の状態を確実に知ることが可能となる。なお、本形態ではフォトセンサ6とドア用センサドグ15gとからなる構成をドア位置検出センサとして用いている。しかし、当該ドア位置検出センサは、当該組み合わせに限定されず、例えば接触センサとセンサ押圧ピンとからなる組み合わせ、等、公知の種々の組み合わせから構築しても良い。また、単純に最終的な停止位置でのみオン信号を発する構成としても良い。
【0020】
ドア15aの外部空間側面(ポッド31と対向する面)には、図3に示すようにラッチ機構15eが設けられている。当該ラッチ機構15eはポッド31の蓋33の表面に設けられた不図示の被ラッチ部と係合し回転することによって、該被ラッチ部と結合された上述した係合爪をポッド31に設けられた受容孔から退避させ、或いは非係合状態にある係合爪を受容孔に進入させ、当該蓋33をポッド31に対して着脱することを可能とする。吸着パッド15kは該蓋33と当接した状態で不図示の配管を通じて負圧供給源8(図6参照)より負圧を供給することにより該蓋33を吸着し、当該蓋33をドア15aによって保持することを可能とする。ドアシステム15は、ドアアーム15b、ドア開閉アクチュエータ15c及びドア上下機構15dを有する。ドアアーム15bは棒状の部材からなり、一端においてドア15aを支持し、他端においてドア開閉アクチュエータ15cと連結されており、中間部の適当な位置において当該位置を中心に回転可能に軸支されている。ドア開閉アクチュエータ15cによって該回転中心を軸としてドアアーム15bは回転し、該ドアアーム15bの一端及びここに支持されるドア15aは第一の開口部11に対して接近或いは離間の動作を行う。ドア上下機構15dは、ドア開閉アクチュエータ15cと前述したドアアーム15bの回転軸とを支持し、上下動用アクチュエータによって上下方向に延在するガイドに沿って当該アクチュエータ及びこれに支持されるドアアーム15b及びドア15aを上下方向に駆動する。
【0021】
また、ドアアーム15bには、筐体5と対向し且つ前述したセンサ用凹空間6bに対応する配置で前述したドアセンサ用ドグ15gが設けられる。当該ドアセンサ用ドグ15gは、ドアアーム15bの延在面(ドア15aの第一の開口部11閉鎖面)に対して垂直に突出する。より詳細には、ドアセンサ用ドグ15gは、ドアアーム15bにおける回転中心とドア15aとの間に配置される。このようにドア開閉アクチュエータ15cとドア位置検知センサとを分離したことによって、従来困難であったドア15aの僅かな傾き、変位等を正確に検知することが可能となる。また、通常これらドアアーム15b等移動を繰り返す構造物は、ベアリング等の構成物の経時的変化の影響などによって基準位置が変動する恐れがある。本形態の如く、ドアアーム15bにドアセンサ用ドグ15gのみを配置し、実際の検出側のフォトセンサ6を静止物である筐体5側に配置することによって、補正が容易であると共に安定的に変位を検知可能なドア位置検知センサを得ることが可能となる。
【0022】
なお、図6に当該FIMSシステム1の構成をブロック図として示す。上述したファン7、ロボット9、ドアシステム15、ポッド固定システム25、及びドッキングプレート駆動システム27は、制御装置2によって各々制御される。ドアシステム15は、ラッチ機構15e、ドア開閉用アクチュエータ15c、及びドア上下機構15dを各々独立して制御可能であるが、実際上はこれら各々の構成が一連のタイムチャートに応じて動作するようにこれら構成を制御する。吸着パッド15kは、真空吸着によって蓋33を保持する蓋保持手段として作用する。なお、吸着パッド15kに対する負圧供給源8からの負圧の供給及び供給停止(負圧の破壊)の動作は、制御装置2によって行われる。ドッキングプレート駆動システム27は、駆動シリンダ27bの駆動のオンオフを行うが、当該駆動シリンダ27の動作によってドッキングプレート23が確実に所定の二位置、即ちポッド31のロード位置に存在する場合とポッド31がウエハ挿脱可能な位置であるドック位置に存在する場合とを検知する必要がある。このため、ポッド31がドッキングプレート23上の載置されたこと、及びドッキングプレート23に対してポッド31をロード・アンロードすべき位置に該ドッキングプレート23が存在することを検知するロードセンサ27dが、ドッキングプレート駆動システム27に接続されている。また、ドッキングプレート23がドック位置(ポッド31が最も第一の開口部11に接近し、内部に収容されたウエハ35の挿脱が為される位置)に存在するか否かを検知するドックセンサ27cも該ドッキングプレート駆動システム27に接続されている。当該ドックセンサ27cは当接センサから構成され、ドッキングプレート23が該前進端部から僅かに変位した際であっても、オフ信号を発してこれを制御装置2に伝達する。即ち、ドックセンサ27cは、ドッキングプレート27の前進端部からの変位に応じた信号を発し、制御装置2と協働して変位検知手段として作用する。
【0023】
次に、上述したフォトセンサ6及びドックセンサ27cがポッド31に対する蓋33の取り付け時においてどの様に動作するかを図4A、4B、5A及び5Bを参照して説明する。図4Aに示すように、通常の蓋33のポッド31への取り付け動作の場合、蓋33はポッド31に設けられた蓋33収容用の凹部内に嵌まり込み、ドア15a及びこれを支持するドアアーム15bは所定の開口部11閉鎖姿勢をとることとなる。その際、ドア用センサドグ15gはセンサ用凹空間6b内に所定の深さまで進入し、フォトセンサ6は制御装置2に対して所定のタイミングでオフ、オン、及びオフの信号を伝える。これに対し、図4Bに示すように、ポッド31の固定状態或いはドア15aによる蓋33の保持状態の不備、更にはドア15aの動作異常等によって蓋33がポッド31の収容凹部に対して傾いて押し込まれる場合がある。この場合、当該状態のままにラッチ機構15eを動作させても係合爪は受容孔に対して好適に係合しきれず、結果としてポッド搬送時の蓋33の落下等を招いてしまう。このような蓋33の取り付け状態にあるとき、ドア用センサドグ15gはセンサ用凹空間6bに対して所定の深さまで進入することができない。従って、フォトセンサ6は所定のタイミングでのオフ、オン及びオフの信号における最後のオフ信号を発することができない、或いはタイミングが異なる、等、通常とは異なる信号を発することとなる。このような信号を制御装置2において通常時の信号と比較することによって、ポッド31に対する蓋33の取り付け状態を知ることが可能となる。
【0024】
また、蓋33が傾いた状態のままでこれをポッド31に取り付けようとした場合、例えばドア15aが蓋33を押圧する力が大きい場合には、蓋33が撓む等の変形をすることも考えられる。この場合、フォトセンサ6からは蓋3が正しくポッド31に対して取り付けられたことを示す信号しか得られない。本形態では、以下の構成をさらに付加することによってこのような事態の対処を行っている。即ち、ドッキングプレート駆動システム27において駆動力を呈する駆動源をエアシリンダ等より構成し、当該駆動力をドア15aの上述した凹圧力よりも小さくなるように設定している。
【0025】
ドア15a及び蓋33が所定の状態を維持していれば、ドア15aの押圧力はポッド31、ドッキングプレート23等に作用することは基本的には無い。しかし、蓋33が傾いた状態でドア15aがこれを押圧した場合、蓋33は傾いた変位分だけ受けた押圧力をポッド31等に伝えることとなる。当該押圧力はドッキングプレート23に作用してこれを前進端部から後端部(ポッド31は当初ポッド載置部21に載置する或いはポッド載置部21から持ち運ぶ際のロード・アンロード位置)方向に押し戻すこととなる。上述した構成では、ドックセンサ27cがこの位置変化に基づいたオフ信号を制御装置2に送ることとなる。図5Aは蓋33のポッド31への取り付けが好適に行われた場合を示し、図5Bは蓋33が傾いて好適に行われなかった場合を模式的に示している。図に示しように、図5Bの場合、ポッド31に対して矢印Aの押圧力が作用し、当該押圧力によってドックセンサ27cがオフ信号を発することとなる。即ち、上述したフォトセンサ6の信号及びドックセンサ27cの信号の両者を、蓋33が正しくポッド31に挿入された場合に発せられるこれらからの信号と比較することによって、蓋33のポッド31への取り付け状態を確実に検知することが可能となる。なお、矢印Aで示される押圧力は、ドア15aが第一の開口11を閉鎖するために移動する際の駆動力と一致しており、ドア15aが第一の開口部11を略閉鎖する位置に達して停止するまで、当該押圧力は蓋33等に作用可能とされている。
【0026】
ここで、実際にウエハ処理作業を行う際の当該FIMSシステム1の動作について説明する。ウエハ処理作業において、所定枚数のウエハを収容し内部が清浄気体によって満たされたポッド31がドッキングプレート23上に載置される。ドッキングプレート23を載置する際に、ポッド固定システム25が動作してドッキングプレート23に対するポッド31の載置位置を所定のものとする。続いてドッキングプレート駆動システム27が動作し、ポッド31を第一の開口部11に向けて駆動する。具体的には、ポッド固定システム25によってドッキングプレート23と一体化されたポッド31を、ドッキングプレート23を介する様式にて駆動シリンダ27bが移動させる。その際、ドア15aは第一の開口部11を略閉鎖する位置で停止している。当該駆動動作は、ポッド31の蓋33がドア15aの当接面と当接し、ドッキングプレート23と第一の開口部11と所定の位置関係となった段階手終了する。この時、ラッチ機構15eが蓋33表面の被ラッチ部と係合され回転することによって蓋33をポッド31に対して着脱可能な状態とすると同時に、吸着パッド15kが蓋33を吸着し、蓋33がドア15aによって保持された状態となる。
【0027】
当該状態からドア開閉アクチュエータ15cが動作を開始し、ドアアーム15bが回動して蓋33を保持するドア15aを第一の開口部11から微小空間3の内部方向に運ぶ。ドアアーム15bが所定角度で回動を停止した後、ドア上下機構15dが動作を開始し、ドア開閉アクチュエータ15cと共にドア15aを下方に移動させる。当該動作によって第一の開口部11は全開状態となり、微小空間3は第一の開口部11を介してポッド31の内部と連通した状態となる。この状態においてロボット9が動作を開始し、ロボットアーム9aによってウエハ35をポッド31の内部から第二の開口部13を介してウエハ処理装置17に搬送する。また、この状態を維持して、当該ロボット9は、更にウエハ処理装置17内部において所定の処理が施されたウエハをポッド31内部へも搬送する。蓋33をポッド31に取り付け、ポッド31をFIMSシステム1より取り外し可能とする場合には、基本的にはこれら動作が逆に行われる。
【0028】
以上に述べた構成からなるロードポート装置1において、本発明の特徴について以下に詳述する。通常ポッド31をFIMSシステム1からアンロードする(ポッドを取り外し可能な状態とする。)場合には、上述したようにロード(ポッドを載置台に装着する。)時とは逆の手順で各々の構成を動作させる。このアンロードの動作において、本実施形態で制御装置2によって為される当該動作を、図6のフローチャートに示す。具体的には、ドアシステム15を動作させ、ドック位置に停止中のポッド31の開口31aに対して蓋33を取付ける(S1)。当該蓋33の取り付け動作の際に、上述したフォトセンサ6からなるドア位置検出センサより所定のタイミングにてオフ、オン、オフの信号が制御装置2に送られる。また、ドックセンサ27cからは制御装置2に対してドッキングプレートが前進端部に存在するか否かを示す信号が送られる(S2)。続いて、制御装置2ではこれらの信号と通常の信号との比較が為される(S3)。その際、ドア位置が適切でない、或いはドッキングプレートが前進端部より変位した、といった結果が得られ場合には、制御装置2は異常を示す情報を発して装置を停止させる(S4)。
【0029】
何れのセンサから得られた信号よりも問題が無いと判定された場合には、ラッチ機構15eの動作が行われ、蓋33のポッド31の固定が行われる(S5)。通常、この固定操作を行ってもドアの位置及びドッキングプレートの位置は変化しない。しかし、例えばドアが僅かに変形することによって、見かけ上ドア位置検出センサ上でもドックセンサ27c上でも異常が検知されない場合も考えられる。このような場合、ラッチ機構15eによる係合爪の突き出し操作によって蓋33が正常の位置に戻る場合と、係合爪が受容孔に収まり得ずにこの段階でドア或いはドッキングプレートの停止位置を変位させることも考えられる。そこで本実施形態では、この段階で再度ドア位置検出センサ及びドックセンサ27cからの信号の判定が制御装置2によって行われる(S6及びS7)。その際、ドア位置が適切でない、或いはドッキングプレートが前進端部より変位した、といった結果が得られた場合には、制御装置2は異常を示す情報を発して装置を停止させる(S8)。何れのセンサから得られた信号よりも問題が無いと判定された場合には、ドア15aによる蓋33の保持が解除され(S9)、ドッキングプレート駆動システム27によるポッド31のアンロード位置への移動が行われる。以上の制御装置2による動作を実施することによって、蓋33をポッド31に対して正確且つ確実に固定することが可能となる。なお、上述の形態では係合爪が受容孔に収まらず且つ蓋自身の微小変形によってドア及びドッキングプレートの位置が所定位置に存在している場合も可能性としては考えられる。この場合、上述した操作に、更にラッチ機構15eの動作の適否を判別する信号を得られる構成とし、当該信号も判定対象とすることによって蓋33の状態をより確実に判定することが可能となる。
【0030】
以上に述べた本発明に係るポッドの蓋閉鎖方法を実施することによって、ポッドに対して蓋か好適に固定されているか否かを簡便且つ確実に知ることが可能となる。また、従来装置に対してドア位置検知センサを配し、且つ当該センサ及びドックセンサからの信号のオンオフを判定するステップ、当該判定結果に応じて再度蓋の固定操作を行うステップを、従来装置における動作フローに付加することだけでも、本発明の実施が可能となるという効果も得られる。また、ポッドに対して特に新たな構成を付加する必要が無く、従来のポッドをそのまま用いて本発明を実施することも可能となる。
【0031】
なお、上述した実施形態においては、ドッキングプレート23等の変位を検知する変位検知手段として、ドックセンサ27cを用いることとしている。しかしながら、ポッドの形状、例えば開口面が突き出す形状の場合には、前述したドックセンサ27cでは、配置上適切に変位を検地できない場合も考えられる。この場合、前述したドックセンサの信号のみならず、ドッキングプレートがある程度ドック位置から移動したことを検知するために配置される不図示の所謂アンドックセンサから信号を併用して用いることとしても良い。ドックセンサ及びアンドックセンサからの二つの位置信号を用いることによって、用いるポッドに応じて特定区間の変位により蓋の固定状態を判定することが可能となる。従って、ポッドの形状に依存することなく、蓋とポッドとの固定状態を知ることが可能となる。
【0032】
また、微小な変位を検知することによって、駆動シリンダ27bの荷重負荷の解除に伴う動作を極力小さくし、当該動作にともなる所謂ロスタイムを低減することが求められる場合も考えられる。更に、ポッドによってはポッド31に対する蓋33の固定が弾性部材を介して為されている場合もあり、この場合、実際上ドッキングプレート23等が当該弾性部材の変形量以上の変位を呈さない場合には蓋33の固定状態の適否を判別できない可能性がある。これらの場合、駆動シリンダ27bに変えて所謂サーボモータを駆動源として用いることが好ましい。当該構成の付加によって装置構成を改変する必要性が生じる半面、ドッキングプレート等の変位をサーボモータに付加されたエンコーダによって検知することで、検知に要する変位を更に小さくすることが可能となる。また、サーボモータとしてトルク管理が可能なものを用いることとし、ドッキングプレートの一時的な移動の際のトルク変化を予め得ておき、当該トルク変化と実際に得られるトルクとの相違から蓋の固定状態を知ることとしても良い。即ち、制御手段中にメモリ及び比較回路を配置することとし、通常のトルク変動をメモリに格納しておき、実際に得られるトルク変動をメモリに格納されたトルク変動と比較回路にて比較し、当該比較の結果相違点が閾値を超えた場合に蓋が適切に工程さていないと判定する。以上の操作が上述したS3或いはS7にて為されることとなる。この場合、事実上変位が存在しない場合であっても、蓋の固定状態を検知することが可能となる。なお、本発明においては、このようなトルク変化も含めてポッドの変位として定義することとし、上述したドックセンサ、アンドックセンサ、エンコーダ、トルク変化の検知機構、及びこれらに付随するタイマ等の構成を含め、変位検知手段として定義することとする。このような変位検知手段を用いることによって、ポッドの形状によらず、蓋の固定状態の適否を検知することが可能となる。なお、当該変位検知手段としては、光電センサ等ポッドの実際の変位を求める構成によっても構築可能である。即ち、本発明における変位検知手段は、ドッキングプレート或いはポッドの微小変位、或いはこれら両者或いは何れかに付加される荷重トルク変化を検知可能な種々の構成に置き換えることが可能である。
【0033】
なお、上記実施形態においては、蓋をポッドに固定する固定手段として蓋側に配置される係合爪とポッド側に配置される受容孔とからなる構成を例示している。しかしながら、本発明における蓋とポッドとを一体化させて固定する固定手段は当該形態に限定されず、係合爪と受容孔との配置を各々入れ替えても良く、更にこれらとは異なる様式からなる固定手段であって、外部からの操作によって固定、解除を実施可能な種々の構成を用いることとしても良い。また、蓋保持手段として吸着パッドを用いることとしているが、当該様式のみならず所謂ラッチによる保持等、種々の構成を用いることが可能である。なお、他の構成を用いる場合には、前述した駆動シリンダから供給される駆動力との間において、蓋の固定状態を判定する際の操作において、駆動力<保持力の関係を満たすようにドッキングプレート駆動手段及び蓋保持手段の構成を選択することが求められる。
【0034】
図4A及び図4Bに示したとおり、ここまでは、フォトセンサ6を筐体に固定し、ドア用センサドグ15gがドアアーム15bとともに可動な例を説明した。逆に、フォトセンサ6をドアアーム15bとともに可動とする変形も可能である。以下、この変形例について、図9Aおよび図9Bを参照して説明する。図9A及び図9Bは、それぞれ図4A及び図4Bに示される構成の変形例を示している。ドアアーム15bは、回転中心となる軸15i周りに回動可能に、支持部材15hに枢支される。支持部材15hは、ドア開閉アクチュエータ15cに固定され、ドア開閉アクチュエータ15cからドアアーム15bの壁部をドアアーム15bの内部に向かって貫通して水平に突出している。支持部材15hは、ドア開閉アクチュエータ15cと共に昇降する。ドア開閉アクチュエータ15cから突出可能に延出するロッド15jが、軸15iに対してドア15aと反対側となる端部に連結される。ロッド15jが突出すると、ドアアーム15bは回転中心となる軸15i周りにドア15aを閉鎖するように回動し、一方、ロッド15jが引き込まれると、ドアアーム15bは回転中心となる軸15i周りにドア15aを開放するように回動する。フォトセンサ6は、ドアアーム15bの内壁部に、取り付け部材を介して取り付けられる。すなわち、フォトセンサ6は受光部と発光部を備え、フォトセンサ6の発光部から発せられる光が、受光部に入射するように、フォトセンサ6は、ドアアーム15bに対して固定される。これにより、フォトセンサ6は、ドアアーム15bの回動動作に併せて、可動である。すなわち、ドア15aの開閉動作の際に、フォトセンサ6はドア15aを支持するドアアーム15bの回転中心を軸とした回動に併せて回動する。また、この例では、ドア用センサドグ15gは、ドアアーム15bを枢支する支持部材15hに対して固定される。たとえば、ドア用センサドグ15gは、ドア開閉アクチュエータ15cから支持部材15hと、ドアアーム15bの内部において、フォトセンサ6に向かって上方に突出するように一体的に結合される。
【0035】
本実施形態ではフォトセンサ6とドア用センサドグ15gとからなる構成をドア位置検出センサとして用いている。ドア用センサドグ15gは以下の3つの状態を満たすようにドア開閉アクチュエータ15cに固定される。まず、ドア15aに保持された蓋33がポッド31を閉鎖していない第1の状態では、ドア用センサドグ15gはフォトセンサ6の受光部への光を遮らず、フォトセンサ6は制御装置2に対してオフの信号を伝えている。次に、図9Aに示すように、通常の蓋33のポッド31への取り付け動作の際に、フォトセンサ6がドアアーム15bの回動に併せて移動し、蓋33が所定の状態でポッド31を閉鎖した第2の状態では、ドア用センサドグ15gはフォトセンサ6の受光部への光を遮り、フォトセンサ6は制御装置2に対してオンの信号を伝える。なお、所定の状態とは、例えば、蓋33がポッド31の開口31aを正しい姿勢で閉鎖している状態をいう。一方、図9Bに示すように、ポッド31の固定状態或いはドア15aによる蓋33の保持状態の不備、更にはドア15aの動作異常等によって、蓋33がポッド31の収容凹部に対して傾いて押し込まれる場合がある。この場合、蓋33は正しい姿勢でポッド31の開口31aを閉鎖していない状態であり、当該状態のままにラッチ機構15eを動作させても係合爪は受容孔に対して好適に係合しきれず、結果としてポッド搬送時の蓋33の落下等を招いてしまう。上で述べたように、蓋33が所定の状態以外でポッド31を閉鎖した第3の状態では、ドア用センサドグ15gはフォトセンサ6の受光部への光を遮らず、フォトセンサ6は制御装置2に対してオフの信号を発したままとなる。なお、上記において、蓋33が所定の状態でポッド31を閉鎖した際に発せられる信号をオンの信号とよぶ。これ以外の状態では、蓋33は閉鎖されていないか、または蓋33は異常な状態でポッド31を閉鎖しており、この状態における信号をオフの信号とよぶ。従って、蓋33が所定の状態で前記開口31aを閉鎖した際にのみ、該ドア用センサドグ15gが前記フォトセンサ6の受光部への光を遮り、ドア用センサドグ15gがフォトセンサ6の受光部への光を遮るか否かに伴ってフォトセンサ6は発する信号を変化させることが可能となる。蓋33がポッド31の開口31aを閉鎖する動作を行った後に、フォトセンサ6から発せられる信号の状態(オンの信号またはオフの信号)が制御装置2によって判定される。すなわち、ドア15aが開口部11を閉鎖する位置に存在することを制御装置2によって判定する。また、オンの信号が発せられているときのみ、ラッチ機構15eを動作させる。一方、オフの信号が発せられているときは、ラッチ機構15eを動作させない。すなわち、蓋33がポッド31の開口31aを正しく閉鎖している状態でのみ、ラッチ機構15eを動作させれば、係合爪を受容孔に対して正しく係合させる確率が高くなる。上述したように本実施形態においても、ラッチ機構15eを動作させて蓋33をポッド31に対して固定する動作を行った後に、フォトセンサ6がオンの信号を発したままであるかを制御装置2によって再度判定する(図7のS6及びS7)。すなわちラッチ機構15eの動作によってもドア15aが変位せずに、ドア15aが開口部11を閉鎖する位置に存在することを、制御装置2によって判定する。この判定は、ラッチ機構15eが正常に動作したにもかかわらず、蓋33の係合爪がポッド31の受容孔に正しく係合されていないような問題が発生していないか確認するために実行される。蓋33がポッド31の開口31aを閉鎖していないか、または異常な状態で閉鎖している状態では、ラッチ機構15eを動作させることはなく、蓋33がポッド31の開口31aを正しく閉鎖するために必要な処置を実行することが出来る。従って、フォトセンサとセンサ用ドグからなる簡便な構成であっても、ドア用センサドグ15gがフォトセンサ6の受光部への光を遮るか否かに応じて、フォトセンサ6が発する信号を変化させ、その信号の変化をモニタリングすることによってポッド31に対する蓋33の取り付け状態を知ることが可能となる。
【0036】
また、フォトセンサ6の発光部または受光部のいずれかをドアアーム15bに対して固定してドアアーム15bの回動に併せて可動とし、他方をドア用センサドグ15gと同様に、ドアアーム15bを回転中心となる軸15iまわりに枢支する支持部材15hに対して固定する構成を採用することも出来る。この構成により、蓋33が所定の状態でポッド31の開口31aを閉鎖した際にのみ、フォトセンサ6において、発光部からの光が受光部に入射し、オンの信号が発せられ、ラッチ機構15eを動作させることが出来る。この場合、ドア用センサドグ15gは必要なくなる。
【0037】
また、上述した実施形態では、ドア位置検知センサが、ドアアーム15bと、微小空間を画定する筐体5における開口部11の形成面5aと、に分かれて配置される構成を示している。しかしながら、ドア位置検知センサは何れか一方の側に配置することとしても良い。当該形態であってドアアーム側に当該ドア位置検知センサを配置した一例を図8に示す。図8は4A等と同様の様式にてドア15aがまだ第一の開口部11を閉鎖していない状態を示す。本形態では、第一の開口部11が形成される筐体壁5aと対向するドアアーム15bの表面に、所謂プランジャタイプの可動式センサ36が配置される。当該可動式センサ36は、前述したドアアーム15b表面に形成されたドア側凹部36aと、可動ドグ36bと、バネ等弾性部材からなる付勢手段36cと、可動ドグ検知センサ36dと、ドグ位置規制手段36aと、を有する。可動ドグ36bはドアアーム15b表面に垂直な方向に延在し、当該方向に沿って配置されるピン状の部材からなる。付勢手段36cは、ドア側凹部36a内部に収容されて、一方の端部が該ドア側凹部36aの内壁に当接し、他方の端部が可動ドグ36bと当接する。ドグ位置規制手段36eは、可動ドグ36bの先端部が貫通可能な貫通穴を有する。また、ドア側凹部36aの開口部を閉鎖すると共に可動ドグ36bの軸方向移動に伴ってその一部と当接することによって、可動ドグ36bのドアアーム15b表面からの突き出し量を規制する。前述した付勢手段36cが可動ドグ36bに対して筐体壁5a方向に付勢力を与えることによって、可動ドグ36bはドグ位置規制手段36eとその一部が当接して所定量が突き出した状態を維持する。ドア15aが第一の開口部11を略閉鎖する位置に至ると、可動ドグ36bは対応する筐体壁5aとその先端部(筐体壁5aと対向する端部)が当接し、突き出し量を減少させてドア側凹部36a内に押し込められる。ドア側凹部36aの底部には例えば接触センサ、フォトセンサ等より構成される可動ドグ検知センサ36dが配置されている。従って、ドア側凹部36a内に押し込められた可動ドグ36bの後端部の存在或いはその移動量に応じて、ドア15aの位置に対応した信号を発する。当該構成とすることにより、ドア位置検知センサに関連する構成をドアシステム15にのみ配することとなり。現状のFIMSシステムに対しての適用が容易に実施可能となる。
【0038】
なお、図4A等或いは図8に示す形態に置いて、ドア位置検知センサの配置はドアアーム15bにおける回転動作の回転中心側ではなく、ドア15aとの接合部に近接する領域に配置されることが好ましい。より具体的には、ドア15aに近接し筐体壁5aの微小空間3側の領域と対向する領域、更には、該筐体壁5aの外部空間側のドッキングプレート駆動システム27が配置される領域と対応する微小空間3側の領域に配置されることが好ましい。当該領域はドア15aの回転動作及び上下動作に緩衝しない空間に対応し、センサ、凹部等を配置することが容易であり、従来の構成に対してFIMSの清浄度維持の観点からその影響を最も低く抑えられると考えられる。また、ドア15aの第一の開口部11の閉鎖動作に影響しない領域であって、ドアアーム15bの回転中心から最も離れ且つ設置可能な領域にドア位置検知センサを配置することとなり、ドア15aの変位を拡大して検知することとなる。従ってドアの姿勢、或いはその変化を高精度で検出することが可能となる。
【0039】
また、本発明はウエハを対象とするFIMSシステムに関して主として述べている。しかしながら、本発明の適用対象は該システムに限定されず、例えばディスプレイ用のパネル、光ディスク等を収容する密閉容器等に対しても適用可能である。
【符号の説明】
【0040】
1:ロードポート装置、 2:制御装置、 3:微小空間、 5:筐体、 フォトセンサ6、 7:ファン、 8:負圧供給源 9:ロボット、 11:第一の開口部、 13:第二の開口部、 15:ドアシステム、 17:ウエハ処理装置、 21:ポッド載置部、 23:ドッキングプレート、 25:ポッド固定システム、 27:ドッキングプレート駆動システム、 31:ポッド、 33:蓋、 35:ウエハ、 36:可動式センサ
【特許請求の範囲】
【請求項1】
蓋と前記蓋により閉鎖される開口を一側面に有すると共に内部に被収容物を収容可能な密閉容器に対して前記蓋を開閉して前記密閉容器内部への前記被収容物の挿脱を可能とする蓋開閉システムにおいて、前記蓋により前記開口を閉鎖する蓋閉鎖方法であって、
前記蓋及び前記密閉容器は前記蓋或いは前記密閉容器の外部からの操作によって前記蓋を前記密閉容器に対して固定する係合手段を有し、
前記蓋開閉システムは、
開口部を有する微小空間と、
前記開口部を略閉鎖する位置と開放する位置との間で移動可能であって、前記蓋を保持する蓋保持手段を有するドアと、
前記開口部に対して前記開口が正対するように前記密閉容器を載置可能であると共に、前記密閉容器と共に前記開口部に対して接近及び離間可能であって、接近時において前記蓋を取り外して前記被収容物を挿脱する第一の位置に前記密閉容器を配置し、離間時において前記密閉容器のロード及びアンロードを行う第二の位置に前記密閉容器を配置するドッキングプレートと、
前記ドッキングプレートの前記接近及び離間の動作を為すドッキングプレート駆動手段と、を有し、
前記ドアにより前記開口を閉鎖する位置に前記蓋を移動させ、
前記ドアが前記開口部を略閉鎖する位置に存在すること、及び前記ドッキングプレートが第一の位置に存在することを判定し、
前記係合手段によって前記蓋を前記密閉容器に固定し、
前記ドアが前記開口部を略閉鎖する位置に存在すること、及び前記ドッキングプレートが第一の位置に存在することを判定する、工程を有することを特徴とする密閉容器の蓋閉鎖方法。
【請求項2】
前記ドッキングプレート駆動手段はシリンダ機構からなる駆動手段であって、
前記ドッキングプレート駆動手段による前記ドッキングプレートの駆動力は、前記ドアが前記開口部を略閉鎖するために移動される際の駆動力よりも小さく設定されることを特徴とする請求項1に記載の密閉容器の蓋閉鎖方法。
【請求項3】
前記ドアは、前記ドアを一方の端部に支持するドアアームと、前記ドアアームの他方の端部に連結されて前記ドアアームを駆動するドア開閉アクチュエータと、前記ドア及び前記ドア開閉アクチュエータの間において前記ドアアームを回転可能に軸支する回転中心とによって回動可能に支持され、
前記ドアが前記開口部を略閉鎖する位置に存在するか否かの判定は、前記ドアアームにおける前記回転中心と前記ドアとの間に配置されるドア位置検知センサから得られる信号に基づくことを特徴とする請求項1或いは2の何れかに記載の密閉容器の蓋閉鎖方法。
【請求項4】
前記ドア位置検知センサは、
前記ドアアームから突出するドア用センサドグと、
前記微小空間を画定する筐体における前記開口部が形成される面に設けられて前記ドア用センサドグが進入可能な凹部であるセンサ用凹空間に配置されるフォトセンサとを備え、
前記センサドグの前記センサ用凹空間への進入に伴って前記フォトセンサは変化する信号を発することを特徴とする請求項3に記載の蓋閉鎖方法。
【請求項5】
前記ドア位置検知センサは、
前記ドアアームに対して固定され、該ドアアームの回動に併せて可動なフォトセンサと、
該ドアアームを枢支する支持部材に対して固定されるドア用センサドグとを備え、
前記フォトセンサは、該ドアアームの回動に併せて移動し、前記蓋が所定の状態で前記開口を閉鎖した際にのみ、該ドア用センサドグが前記フォトセンサの受光部への光を遮り、前記センサドグが前記フォトセンサの前記受光部への光を遮るか否かに応じて前記フォトセンサは発する信号を変化させることを特徴とする請求項3に記載の蓋閉鎖方法。
【請求項6】
前記ドア位置検知センサは、前記微小空間を画定する筐体における前記開口部が形成される面に対向する前記ドアアームの表面に配置されるドア側凹部と、前記ドア側凹部に収容されて先端部を前記ドアアーム表面より突出させる可動ドグと、前記ドア側凹部に収容されて前記可動ドグに対して突出方向の付勢力を与える付勢手段と、前記可動ドグの停止位置に応じて前記可動ドグの前記ドアアーム表面からの突出量に対応した信号を発する可動ドグ位置検出センサと、を有する請求項3に記載の蓋閉鎖方法。
【請求項7】
蓋と前記蓋により閉鎖される開口を一側面に有すると共に内部に被収容物を収容可能な密閉容器に対して前記蓋を開閉して前記密閉容器内部への前記被収容物の挿脱を可能とする蓋開閉システムであって、
前記蓋及び前記密閉容器は前記蓋或いは前記密閉容器の外部からの操作によって前記蓋を前記密閉容器に対して固定する係合手段を有し、
前記蓋開閉システムは、
開口部を有する微小空間と、
前記開口部を略閉鎖する位置と開放する位置との間で移動可能であって、前記蓋を保持する蓋保持手段を有するドアと、
前記開口部に対して前記開口が正対するように前記密閉容器を載置可能であると共に、前記密閉容器と共に前記開口部に対して接近及び離間可能であって、接近時において前記蓋を取り外して前記被収容物を挿脱する位置に前記密閉容器を配置し、離間時において前記密閉容器のロード及びアンロードを行う位置に前記密閉容器を配置するドッキングプレートと、
前記ドッキングプレートの前記接近及び離間の動作を為すドッキングプレート駆動手段と、
前記ドッキングプレートが前記接近時の位置から変位したことを検知する変位検知手段と、
前記ドアが前記開口部を略閉鎖する位置に存在するか否かに応じた信号を発するドア位置検知センサと、を有することを特徴とする密閉容器の蓋開閉システム。
【請求項8】
前記ドッキングプレート駆動手段はシリンダ機構からなる駆動手段であって、
前記ドッキングプレート駆動手段による前記ドッキングプレートの駆動力は、前記ドアが前記開口部を略閉鎖するために移動される際の駆動力よりも小さく設定されることを特徴とする請求項7に記載の密閉容器の蓋開閉システム。
【請求項1】
蓋と前記蓋により閉鎖される開口を一側面に有すると共に内部に被収容物を収容可能な密閉容器に対して前記蓋を開閉して前記密閉容器内部への前記被収容物の挿脱を可能とする蓋開閉システムにおいて、前記蓋により前記開口を閉鎖する蓋閉鎖方法であって、
前記蓋及び前記密閉容器は前記蓋或いは前記密閉容器の外部からの操作によって前記蓋を前記密閉容器に対して固定する係合手段を有し、
前記蓋開閉システムは、
開口部を有する微小空間と、
前記開口部を略閉鎖する位置と開放する位置との間で移動可能であって、前記蓋を保持する蓋保持手段を有するドアと、
前記開口部に対して前記開口が正対するように前記密閉容器を載置可能であると共に、前記密閉容器と共に前記開口部に対して接近及び離間可能であって、接近時において前記蓋を取り外して前記被収容物を挿脱する第一の位置に前記密閉容器を配置し、離間時において前記密閉容器のロード及びアンロードを行う第二の位置に前記密閉容器を配置するドッキングプレートと、
前記ドッキングプレートの前記接近及び離間の動作を為すドッキングプレート駆動手段と、を有し、
前記ドアにより前記開口を閉鎖する位置に前記蓋を移動させ、
前記ドアが前記開口部を略閉鎖する位置に存在すること、及び前記ドッキングプレートが第一の位置に存在することを判定し、
前記係合手段によって前記蓋を前記密閉容器に固定し、
前記ドアが前記開口部を略閉鎖する位置に存在すること、及び前記ドッキングプレートが第一の位置に存在することを判定する、工程を有することを特徴とする密閉容器の蓋閉鎖方法。
【請求項2】
前記ドッキングプレート駆動手段はシリンダ機構からなる駆動手段であって、
前記ドッキングプレート駆動手段による前記ドッキングプレートの駆動力は、前記ドアが前記開口部を略閉鎖するために移動される際の駆動力よりも小さく設定されることを特徴とする請求項1に記載の密閉容器の蓋閉鎖方法。
【請求項3】
前記ドアは、前記ドアを一方の端部に支持するドアアームと、前記ドアアームの他方の端部に連結されて前記ドアアームを駆動するドア開閉アクチュエータと、前記ドア及び前記ドア開閉アクチュエータの間において前記ドアアームを回転可能に軸支する回転中心とによって回動可能に支持され、
前記ドアが前記開口部を略閉鎖する位置に存在するか否かの判定は、前記ドアアームにおける前記回転中心と前記ドアとの間に配置されるドア位置検知センサから得られる信号に基づくことを特徴とする請求項1或いは2の何れかに記載の密閉容器の蓋閉鎖方法。
【請求項4】
前記ドア位置検知センサは、
前記ドアアームから突出するドア用センサドグと、
前記微小空間を画定する筐体における前記開口部が形成される面に設けられて前記ドア用センサドグが進入可能な凹部であるセンサ用凹空間に配置されるフォトセンサとを備え、
前記センサドグの前記センサ用凹空間への進入に伴って前記フォトセンサは変化する信号を発することを特徴とする請求項3に記載の蓋閉鎖方法。
【請求項5】
前記ドア位置検知センサは、
前記ドアアームに対して固定され、該ドアアームの回動に併せて可動なフォトセンサと、
該ドアアームを枢支する支持部材に対して固定されるドア用センサドグとを備え、
前記フォトセンサは、該ドアアームの回動に併せて移動し、前記蓋が所定の状態で前記開口を閉鎖した際にのみ、該ドア用センサドグが前記フォトセンサの受光部への光を遮り、前記センサドグが前記フォトセンサの前記受光部への光を遮るか否かに応じて前記フォトセンサは発する信号を変化させることを特徴とする請求項3に記載の蓋閉鎖方法。
【請求項6】
前記ドア位置検知センサは、前記微小空間を画定する筐体における前記開口部が形成される面に対向する前記ドアアームの表面に配置されるドア側凹部と、前記ドア側凹部に収容されて先端部を前記ドアアーム表面より突出させる可動ドグと、前記ドア側凹部に収容されて前記可動ドグに対して突出方向の付勢力を与える付勢手段と、前記可動ドグの停止位置に応じて前記可動ドグの前記ドアアーム表面からの突出量に対応した信号を発する可動ドグ位置検出センサと、を有する請求項3に記載の蓋閉鎖方法。
【請求項7】
蓋と前記蓋により閉鎖される開口を一側面に有すると共に内部に被収容物を収容可能な密閉容器に対して前記蓋を開閉して前記密閉容器内部への前記被収容物の挿脱を可能とする蓋開閉システムであって、
前記蓋及び前記密閉容器は前記蓋或いは前記密閉容器の外部からの操作によって前記蓋を前記密閉容器に対して固定する係合手段を有し、
前記蓋開閉システムは、
開口部を有する微小空間と、
前記開口部を略閉鎖する位置と開放する位置との間で移動可能であって、前記蓋を保持する蓋保持手段を有するドアと、
前記開口部に対して前記開口が正対するように前記密閉容器を載置可能であると共に、前記密閉容器と共に前記開口部に対して接近及び離間可能であって、接近時において前記蓋を取り外して前記被収容物を挿脱する位置に前記密閉容器を配置し、離間時において前記密閉容器のロード及びアンロードを行う位置に前記密閉容器を配置するドッキングプレートと、
前記ドッキングプレートの前記接近及び離間の動作を為すドッキングプレート駆動手段と、
前記ドッキングプレートが前記接近時の位置から変位したことを検知する変位検知手段と、
前記ドアが前記開口部を略閉鎖する位置に存在するか否かに応じた信号を発するドア位置検知センサと、を有することを特徴とする密閉容器の蓋開閉システム。
【請求項8】
前記ドッキングプレート駆動手段はシリンダ機構からなる駆動手段であって、
前記ドッキングプレート駆動手段による前記ドッキングプレートの駆動力は、前記ドアが前記開口部を略閉鎖するために移動される際の駆動力よりも小さく設定されることを特徴とする請求項7に記載の密閉容器の蓋開閉システム。
【図1】


【図2】
【図3】

【図4A】
【図4B】
【図5A】
【図5B】
【図6】
【図7】

【図8】

【図9A】
【図9B】
【図2】
【図3】
【図4A】
【図4B】
【図5A】
【図5B】
【図6】
【図7】
【図8】
【図9A】
【図9B】
【公開番号】特開2010−153843(P2010−153843A)
【公開日】平成22年7月8日(2010.7.8)
【国際特許分類】
【出願番号】特願2009−269441(P2009−269441)
【出願日】平成21年11月27日(2009.11.27)
【出願人】(000003067)TDK株式会社 (7,238)
【Fターム(参考)】
【公開日】平成22年7月8日(2010.7.8)
【国際特許分類】
【出願日】平成21年11月27日(2009.11.27)
【出願人】(000003067)TDK株式会社 (7,238)
【Fターム(参考)】
[ Back to top ]