
Fターム[2F065PP12]の内容
光学的手段による測長装置 (194,290) | 装置全体の構造 (6,881) | 対象物保持、載物手段 (3,708) | 移動テーブル (2,675)
Fターム[2F065PP12]の下位に属するFターム
回転のみ (699)
Fターム[2F065PP12]に分類される特許
101 - 120 / 1,976
位置測定装置
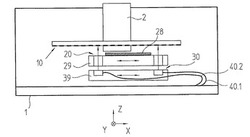
【課題】位置測定装置における可動部材をできる限り他の部材と機械的に接続せずに成る高精度の位置測定装置を提供すること。
【解決手段】検出ユニット20と信号ユニット30を構造的に分離されたユニットとして形成し、検出ユニット20を測定標準10に対して少なくとも1つの測定方向xに沿って変位可能に配置し、光源から照射されるビームを信号ユニット30から検出ユニット20の方向へ照射し、少なくとも1対の部分ビームを検出ユニット20から信号ユニット30の方向へ照射し、検出ユニット20及び信号ユニット30を互いに平行な平面内に配置し、信号ユニット30と検出ユニット20の間におけるビームの少なくとも一部の拡がり方向を前記平面に対して垂直に配向するよう構成した。
(もっと読む)
曲率半径測定機の被測定体保持位置補正方法および曲率半径測定機

【課題】曲率半径測定機の被測定体保持位置補正方法において、曲率半径測定機に発生する被測定体保持位置のずれを精度よく迅速に補正することができるようにする。
【解決手段】曲率半径測定機の被測定体保持位置補正方法であって、保持工程と、校正用光学部材の校正面の面頂を測定光束の集光位置に位置合わせし、位置合わせ後の干渉縞画像に基づく干渉縞画像情報を記憶する基準調整工程(ステップS3)と、この位置を基準位置として、基準位置から位置ずれ測定位置に被測定体を相対移動して干渉縞画像を記憶する位置移動工程と、各位置での干渉縞画像に基づいて干渉計の光軸に対する位置ずれ量を測定する位置ずれ算出工程(ステップS6、S13)と、この位置ずれ量に基づいて、位置補正量を算出する位置補正工程(ステップS15)と、を備え、被測定面の曲率半径の測定を行う際に、位置補正量に基づいて保持台の位置補正を行う。
(もっと読む)
露光装置及びデバイスの製造方法
【課題】計測期間における計測部の温度安定化に有利な露光装置を提供する。
【解決手段】光源63から射出される光で前記基板の上のマークWMを照明し、前記マークで反射した光により前記マークの像を形成する光学系と、前記マークの像を検出する検出部11とを含み、前記マークの位置を計測する計測部と、前記光学系の所定面における光量を制御する制御部90と、を有し、前記マークの位置を計測しない非計測期間に前記光源から射出される光の光量は、前記マークの位置を計測する計測期間に前記光源から射出される光の光量よりも低く、前記光源と前記所定面との間の光路における透過率を前記非計測期間で、前記計測期間における透過率よりも高くすることにより、前記非計測期間と前記計測期間の前記所定面における光量の差を低減する。
(もっと読む)
欠陥観察方法及びその装置
【課題】検査装置の検査情報とレビュー装置で取得した観察情報とを用い、欠陥の高さ、屈折率、材質の情報を取得して欠陥材質・屈折率分析や、微細なパターン形状の三次元解析を行う方法、並びにこれを搭載した欠陥観察装置を提供する。
【解決手段】試料上の欠陥を観察する方法において、光が照射された試料からの反射・散乱光を受光した検出器からの検出信号を処理して検出した検査結果の情報を用いて観察対象の欠陥が存在する位置を走査電子顕微鏡で撮像して画像を取得し、この取得した観察対象の欠陥の像を用いて欠陥のモデルを作成し、作成された欠陥のモデルに対して光を照射したときに欠陥モデルから発生する反射・散乱光を検出器で受光した場合のこの検出器の検出値を算出し、この算出した検出値と実際に試料からの反射・散乱光を受光した検出器の検出値とを比較して観察対象の欠陥の高さ又は材質又は屈折率に関する情報を求めるようにした。
(もっと読む)
形状計測装置及び形状計測方法
【課題】二次元平面を構成する基準面を複数用いて物体の三次元形状を計測する形状計測装置及び形状計測方法を提供する。
【解決手段】本発明の形状計測装置100は、物体を照射する第1の光源20と、物体を照射する第2の光源30と、物体を撮像するための複数の画素を有するカメラ10と、第1の光源20及び第2の光源30の各々で得られる画素毎の輝度比を各基準面の高さと対応付けた画素毎の画素別輝度比・三次元座標変換テーブルを予め保持するメモリ70と、物体を撮像して得られるそれぞれの画像信号の画素毎の輝度比を算出し、該輝度比の値から画素別輝度比・三次元座標変換テーブルを参照して当該物体の三次元座標を決定する制御ユニット50とを備える。
(もっと読む)
基板検査装置、基板検査方法及び該基板検査装置の調整方法
【課題】貼り合わせた2つの基板層のいずれかに検査光の透過しない部分があっても、貼り合わせ界面に発生し得る微小空洞を検査することのできる基板検査装置を提供することである。
【解決手段】基板100の表面に対して斜めに入射するように検査光を帯状に照射する光源ユニット30と、前記検査光により前記基板の表面に形成される帯状照明領域を挟んで光源ユニット30と逆側の所定位置に配置されるラインセンサカメラ20とを有し、照明ユニット30及びラインセンサカメラ20と基板100とが相対移動している際にラインセンサカメラ20から出力される映像信号に基づいて基板画像情報を生成し、基板画像情報に基づいて基板100の第1基板層101と第2基板層102との界面に生じ得る微小空洞についての検査結果情報を生成する構成となる。
(もっと読む)
検査方法および検査装置
【課題】マスクの歪の影響によらずパターンの良否を正確に判定することのできる検査装置および検査方法を提供する。
【解決手段】マスク上の任意の少なくとも4点の座標を測定する(S101)。次いで、これらの少なくとも4点について、それぞれ対応する設計データの各座標との差を求め、最も差の大きい1点を選択する(S102)。次に、選択した1点と設計データの座標との差が予め設定した閾値を超えるか否かを判定する(S103)。閾値以下であれば、少なくとも4点全てを用いて、光学画像と参照画像との位置合わせを行う(S104)。一方、閾値を超える場合には、この点を除外し、残りの少なくとも3点を用いて位置合わせを行う(S105)。
(もっと読む)
パターン形成装置及びパターン形成方法、移動体駆動システム及び移動体駆動方法、露光装置及び露光方法、並びにデバイス製造方法
【課題】パターンが形成される物体を保持する移動体を安定して位置制御する。
【解決手段】露光装置は、ウエハを保持して所定平面内で移動するウエハステージと、所定平面内でウエハステージとは独立に移動する計測ステージと、計測ステージの位置情報を計測する干渉計システム118と、ウエハステージの位置情報を計測する、干渉計システム118に比べて計測値の短期安定性が優れるエンコーダシステム(70A〜70F)と、を備えている。このため、露光装置によると、干渉計システム118により計測ステージの位置情報が計測され、エンコーダシステム(70A〜70F)によってウエハステージWSTの位置情報が計測される。従って、パターンが形成されるウエハを保持するウエハステージを安定して位置制御することが可能となる。
(もっと読む)
形状認識方法、形状認識装置及び実装基板生産装置
【課題】物体が高速で移動し、物体の大きさによって必要とされる分解能が異なる場合でも、当該物体の形状認識を精度良く行うことができる形状認識方法を提供する。
【解決手段】物体の形状認識方法であって、基準光を物体上の投影領域に投影する基準光投影ステップ(S102)と、基準光が投影された投影領域のうちライン状の領域を撮像する基準光撮像ステップ(S104)と、輝度の傾斜方向に輝度が異なる輝度傾斜量を有する光である輝度傾斜光を投影領域に投影する傾斜光投影ステップ(S106)と、輝度傾斜光の投影方向と異なる撮像方向で、輝度傾斜光が投影された投影領域のうち、輝度傾斜光の輝度の傾斜方向と異なる方向に延びて配置されるライン状の領域を撮像する傾斜光撮像ステップ(S108)と、基準光撮像ステップ(S104)と傾斜光撮像ステップ(S108)での撮像結果を用いて物体の形状を認識する形状認識ステップ(S110)とを含む。
(もっと読む)
矯正プレス
【課題】能率よく、かつ正確に適切な矯正を行うことができる矯正プレスを提供する。
【解決手段】被矯正プレートPを載せるベッド5と、ベッド5の上方から被矯正プレートPを押圧する上型7とを有する矯正プレスであって、被矯正プレートPの平坦度を測定する平坦度計を備えており、平坦度計が、レーザー光投射器10とカメラ20からなり、レーザー光投射器10は、プレスの一側においてレーザー光を被矯正プレートPの上面に照射できる位置に配置されており、カメラ20は、プレスの他側においてレーザー光の照射方向に対し被矯正プレートPの送り方向においてオフセットした位置に配置されている。レーザー光投射器10とカメラ20が1対もしくは2対用いられる矯正プレスは、ベッドとクラウン部をコラムを介して連結した構造であって、前後コラム間のサイドオープニング開口SOは被矯正プレートの幅(W)に対する比がSO/W≧0.3が好ましい。
(もっと読む)
3次元計測装置
【課題】反射率の低い被計測物であっても輪郭を正確に計測することができる3次元計測装置を提供する。
【解決手段】
所定の波長領域を有する光を照射し被測定物で反射した反射光と基準反射光との干渉光の各波長の光強度を検出して分光干渉波形を求め、分光干渉波形と理論上の波形関数に基づいて波形解析を実行する制御手段を具備する3次元計測装置であって、被計測面が対物レンズの集光点位置と一致するように予め波形解析後の光強度のピーク位置と共焦点位置の対応をとっておき、制御手段はイメージセンサーからの検出信号に基づいて分光干渉波形を求め、分光干渉波形と理論上の波形関数に基づいて波形解析を実行し、対物レンズの集光点位置に対応する光強度を位置付け手段によって特定されたX、Y座標におけるZ座標の光強度としてメモリに保存し、該メモリに保存されたX、Y、Z座標に基づいて3次元画像を形成する。
(もっと読む)
画像形成装置および画像形成方法ならびに部品実装装置
【課題】安定した3次元認識画像を形成して正しい部品認識結果を得ることができる画像形成装置および画像形成方法ならびに部品実装装置を提供する。
【解決手段】計測対象面への入射方向を挟んで対称に配置され受光面の計測対象面に対する傾斜角度が各対毎に相異なる2対の位置検出素子群25A,25Bを有し、走査光の計測対象面からの反射光の受光位置を検出する位置検出部25と、各位置検出素子が受光する光量が所定の範囲内にあるか否かを判定する受光量判定部34と、同一の位置検出素子群に属する位置検出素子による反射光の受光位置検出結果の差異の大きさが所定の基準値以下であるか否かを判定する受光位置検出結果判定部35とを備え、位置検出部25の受光位置検出結果に基づき受光量判定部34および受光位置検出結果判定部35の判定結果を加味して計測対象面の3次元認識画像を形成する構成とする。
(もっと読む)
3次元形状測定方法および基板検査方法
【課題】3次元形状測定装置および測定方法を提供すること。
【解決手段】3次元形状測定方法は、測定対象物の第1測定領域で第1画像を撮影する段階と、第1中央処理ユニットを通じて前記第1画像を演算処理し、前記第1測定領域での3次元形状を算出する段階と、前記第1中央処理ユニットが前記第1画像を演算処理する間に、前記測定対象物の第2測定領域で第2画像を撮影する段階と、第2中央処理ユニットを通じて前記第2画像を演算処理し、前記第2測定領域での3次元形状を算出する段階と、を含む。これにより、3次元形状の測定時間を短縮させることができる。
(もっと読む)
表面形状測定装置
【課題】表面形状測定装置の配線系統をできるだけ省き、装置の簡素化を図る。
【解決手段】表面形状測定装置10は、測定対象物12の表面に光を照射する光源14と、測定対象物12の表面上の反射点P1からの反射光を第一の反射光と第二の反射光に分離するビームスプリッタ18と、第一の反射光を反射する第一のミラー20と、第二の反射光を反射する第二のミラー22と、を備えている。さらに、第一のミラー20から反射した第一の反射光及び第二のミラー20から反射した第二の反射光を受光する撮像面30を備える撮像器24を備えている。この撮像器24は、ビームスプリッタ18から第一のミラー20を経由して撮像面30まで到る光路長とビームスプリッタ18から第二のミラー22を経由して撮像面30まで到る光路長とが異なるように配置されている。
(もっと読む)
マーク検出方法及び装置、位置制御方法及び装置、露光方法及び装置、並びにデバイス製造方法
【課題】物体上の複数のマークを効率的に、かつ高精度に検出する。
【解決手段】少なくとも1軸方向に関する検出領域が互いに異なる複数のアライメント系で、少なくともその1軸方向に関して互いに異なる位置に配置されたウエハ上のマークを検出するマーク検出方法であって、複数のアライメント系の検出領域にそれぞれウエハ上のマークを移動するステップ315と、ウエハをZ方向にスキャンして複数のアライメント系の検出信号及びデフォーカス量に対応するフォーカス信号を取り込むステップ316と、複数のアライメント系の検出信号とフォーカス信号とからフォーカス信号のオフセットを求めるステップ317とを有する。
(もっと読む)
測定装置、露光装置及びデバイスの製造方法
【課題】物体の位置の測定に有利な技術を提供する。
【解決手段】第1ヘッド112a、112c又は第2ヘッド113aで第1物体に対する第2物体の相対的な位置を測定する第1測定部110と、第1物体に対する第2物体の相対的な位置を求める処理を行う処理部と、を有し、処理部は、第1ヘッド112a、112c及び第2ヘッド113aのうち一方のヘッドで以前に検出された回折格子111a、111b上の位置を他方のヘッドの視野の中心に位置決めした状態で一方のヘッドで以前に検出された回折格子上の位置とは別の位置を一方のヘッドで検出する処理を、一方のヘッドが回折格子の全面を検出するまで繰り返して回折格子の変形量を求める第1処理と、回折格子の変形量に基づいて、第1ヘッド112a、112c又は第2ヘッド113aで測定された第1物体に対する第2物体の相対的な位置を補正する第2処理と、を行う。
(もっと読む)
基板の外観検査装置および外観検査方法
【課題】微小な電子部品であっても、その外形を示すエッジを正確に検出することができる基板の外観検査装置および外観検査方法を提供する。
【解決手段】照明パターン選択手段(照明パターン選択部47)は、複数の方向からの照明光を同時に照射する照明パターン1と、照明パターン1よりも高い輝度で複数の方向からの照明光を別々に照射する照明パターン2と、から照明光照射手段(照明20)による照明光の照射パターンを選択し、画像取得手段(カメラ10)は、照明パターン2が選択された場合には、別々に照射された複数の方向別の照明光毎に画像を取得する。このようにして取得した画像には、電子部品の実装面に略平行な面(上面)および実装面に略垂直な面(側面)により形成されるエッジが、電子部品の側面からの拡散光によって電子部品の外形として表され、エッジ検出手段(エッジ検出部48)はこれらの画像から電子部品の外形を示すエッジを検出する。
(もっと読む)
パターン検査方法およびパターン検査装置
【課題】同一仕様で形成され同一方法で保持された複数の平面基板上の、同一箇所に形成された同一パターンの形状を確実に順次検査するための簡単な方法を提供すること。
【解決手段】1枚目の検査対象基板に対して、検査のためのカメラと検査対象となるパターンとの撮像距離を順次変化させて各撮像距離で撮像して合計で複数の画像情報を入力し、入力した複数の画像情報を予め登録してある登録画像情報と比較して、登録画像情報に最も類似した一画像の情報を複数の画像情報の中から選択して、検査判定するとともに、選択した画像情報に対応する撮像距離をカメラ最適高さとして特定し、2枚目以降の平面基板上の同一箇所に形成された同一パターンの形状検査において、カメラ最適高さとした撮像距離で検査することを特徴とするパターン検査方法。
(もっと読む)
露光装置、露光方法、及び表示用パネル基板の製造方法
【課題】光ビーム照射装置の空間的光変調器の傾きとヘッド部の傾きとを容易に判別して、光ビームの歪みを抑制し、描画精度を向上させる。
【解決手段】光ビーム照射装置20から照射される光ビームを受光する受光装置51をチャック10に設け、光ビーム照射装置20のヘッド部20aを回転する回転機構28を設ける。回転機構28によりヘッド部20aを回転する前と回転した後に、光ビーム照射装置20から照射された光ビームを受光装置51により受光する。ヘッド部20aを回転する前後の、受光装置51により受光した光ビームの位置の変化から、光ビーム照射装置20の空間的光変調器25の傾きとヘッド部20aの傾きとを判別し、判別結果に基づき、空間的光変調器の傾き又はヘッド部20aの傾きを補正する。
(もっと読む)
観察方法、露光装置、及びデバイス製造方法
【課題】液浸法で露光を行う露光装置の液体に接する部分に異常があるかどうかを効率的に判定する。
【解決手段】露光光ELで投影光学系PLと液体1とを介して基板Pを露光する露光方法において、液体1に接する接液部を光学的に観察し、得られる第1画像データを記憶する第1工程と、接液部の液体1との接触後、例えば液浸露光後に接液部を光学的に観察して第2画像データを得る第2工程と、第1画像データと第2画像データとを比較して、その観察対象部の異常の有無を判定する第3工程とを有する。
(もっと読む)
101 - 120 / 1,976
[ Back to top ]