
Fターム[2F065PP12]の内容
光学的手段による測長装置 (194,290) | 装置全体の構造 (6,881) | 対象物保持、載物手段 (3,708) | 移動テーブル (2,675)
Fターム[2F065PP12]の下位に属するFターム
回転のみ (699)
Fターム[2F065PP12]に分類される特許
41 - 60 / 1,976
板状体の検出装置とケースポート及び保管装置
【課題】 板状体の正面を塞がずに、かつ光源と受光素子とを備えている投受光センサを用いて、板状体を確実に検出する。
【構成】 検出装置は板状体が所定位置に存在するか否かを検出する。検出装置は、板状体の一側面へ向けて斜めにスポット状の検出光を投光する光源と反射光を受光する受光素子とを備えている投受光センサと、投受光センサから見て板状体よりも遠方にあり、かつ板状体が存在しない場合、検出光を拡散反射する拡散反射部と、投受光センサへ入射する反射光の所定の強度以下であることから、板状体を検出する検出部、とを備えている。板状体の側面が透明の場合、板状体の側面へ入射した検出光は板状体の内部で複数回反射し投受光センサとは異なる方向へ出射し、板状体の側面が鏡面状の反射面の場合、板状体の側面へ検出光は斜めに入射して投受光センサとは異なる方向へ正反射する。
(もっと読む)
観察装置および観察方法

【課題】透明性基板上に形成された不透明なデバイスパターンを観察像において明確に識別することができる観察方法、および観察装置を提供する。
【解決手段】デバイスパターン3が形成されている側に粘着シート4を貼り付けたうえで透明なステージ7に固定し、ステージ7の上方から同軸透過照明光L1と斜光透過照明光L2とを重畳的に照射するとともに、ステージ7の下方側からステージ7を介して裏面観察手段6で観察することで、観察像においては、デバイスパターン3に対応して、暗い(黒色の)デバイスパターン像が観察され、デバイスパターン像IP1以外の部分は明るく観察される。また、気泡5に対応する部分IB1についても十分に明るく観察される。これにより、観察像においてデバイスパターン3の形状を明確に特定することが可能となる。
(もっと読む)
露光装置及びデバイス製造方法
【課題】 遮光位置のずれを低減する技術の提供。
【解決手段】 原版を光で照明する照明系、前記原版のパターンの像を基板に投影する投影系を有する光学系を備える露光装置で、前記光学系の光路上の前記投影系の物体面と共役な面かその近傍に配置され、前記像が前記基板上に投影される領域の外縁の一部を円弧状に規定する円弧状部を有する遮光板と、前記光学系の光路に沿った回転軸まわりに前記遮光板を回転駆動する回転駆動部と、前記回転軸と交わる方向に前記遮光板をシフトするシフト駆動部と、前記回転駆動部により前記遮光板を回転駆動させ、前記光学系により前記像を前記基板に投影する際の基準となる基準軸と前記回転軸との相対位置の情報を取得する取得部と、前記基板の周辺部に対して前記像を投影する場合、取得した前記相対位置に関する情報に基づき、前記遮光板が所定の位置になるように前記回転駆動部と前記シフト駆動部を制御する制御部を有する。
(もっと読む)
基板検査装置及び検査方法
【課題】基板検査装置及び検査方法を提供すること。
【解決手段】検査方法は、測定対象物を撮影して測定対象物のピクセル別にイメージデータを取得し、測定対象物のピクセル別に高さデータを取得し、測定対象物のピクセル別にビジビリティデータを取得し、取得されたイメージデータと、ピクセル別の高さデータ、及びビジビリティデータのうちの少なくとも1つとを乗算して結果値を算出し、算出された結果値を利用してターミナル領域を設定すること、を含む。よって、より正確にターミナル領域を判別することができる。
(もっと読む)
マシンビジョン検査システムおよびその位置測定結果の決定方法
【課題】複数の視野に分割された対象を高精度に測定することができるマシンビジョン検査システムおよびその位置測定結果の決定方法を提供する。
【解決手段】マシンビジョン検査システムは、第1動作状態においてスケールベースの測定により第1対象FE1の位置を測定する。第2動作状態では、第1対象から第2対象に至る途中で重複画像CIA〜CICを撮影し、画像相関を利用して重複画像CIA〜CICの相互の画像変位を測定し、第1対象の位置と画像変位のセットとを合わせて第2対象FE2の位置を測定する。
(もっと読む)
回路基板の個体識別装置および個体識別方法
【課題】回路基板の個体識別を簡便かつ容易に実現する回路基板の個体識別装置および個体識別方法を提供すること。
【解決手段】回路基板100上の複数の計測対象110の位置を計測し、計測対象110の計測値と計測対象110の設計値との差を計測対象110ごとの位置情報として取得する位置情報取得手段10と、位置情報取得手段10によって取得された位置情報の組み合わせを基板識別符号として登録する登録手段20とを備える回路基板の個体識別装置。
(もっと読む)
移動体駆動方法及び移動体駆動システム、パターン形成方法及び装置、露光方法及び装置、並びにデバイス製造方法
【課題】 エンコーダで位置を計測しつつ、移動体を所望の方向へ精度良く駆動する。
【解決手段】 駆動装置により、ウエハステージWSTのY軸方向の位置情報を計測するエンコーダ62Aの計測値とそのエンコーダによって計測されるスケール39Y1の平面度に関する情報とに基づいて、ウエハステージWSTがY軸方向に駆動される。この場合、駆動装置は、そのエンコーダの計測値に含まれるスケールの平面度に起因する計測誤差をスケールの平面度に関する情報に基づいて補正した補正後の計測値に基づいて、ウエハステージを所定方向に駆動することが可能である。従って、スケールの凹凸に影響を受けることなく、エンコーダを用いてウエハステージを精度良く所定方向に駆動することが可能となる。
(もっと読む)
パターンの描画条件導出方法及びパターン描画装置
【課題】パターンのムラ欠陥の生じない描画条件を導出し、製品の歩留まりを向上する。
【解決手段】基板上に描画するパターンのムラ欠陥が発生しない描画条件を導出する方法であって、基板上に形成するパターンを生成するパターン情報生成工程S1と、パターンに対して、複数の描画項目の組み合わせによる、2通り以上の描画条件を設定する描画条件設定工程S2と、前記生成されたパターンを抜き取り、補助基板上に、前記各描画条件のもとに、矩形領域をなす補助パターンを形成する補助パターン描画工程S3と、補助基板に対して照明光を入射し、補助パターンから生じる回折光を光電変換素子にて画像として取得し、ムラ欠陥に関するムラ評価値とムラ発生周期とを求めことにより、複数の描画条件の中からムラ欠陥が生じない描画条件を導出する描画条件判定工程S4とを含むパターンの描画条件導出方法である。
(もっと読む)
薄膜製造装置のアライメント調整方法、薄膜製造装置、該薄膜製造装置により製造した電気機械変換膜、電気機械変換素子、液滴吐出ヘッド及び液滴吐出装置
【課題】低コスト化を図れる導膜製造装置、製造した電気機械変換素子、液滴吐出装置を提供する。
【解決手段】第1のアライメント調整工程では着弾位置251をカメラ205で捕捉し着弾位置251がカメラ205の撮影撮影基準位置252に一致するように基板又は液滴吐出ヘッド201を相対的に移動する。第2のアライメント調整工程ではレーザレッドによってレーザ光を照射して照射跡を形成し照射跡をカメラ205で捕捉し照射跡がカメラ205の撮影撮影基準位置252に一致するように基板又はレーザヘッドを相対的に移動する。第3のアライメント調整工程では基板上に予め形成されているアライメントマークを撮像手段205で撮影したアライメントマークの形状に基づいて基板の向きを検知して基板の向きの調整を行いアライメントマークを撮像手段205の撮影基準位置に一致するように基板を移動することで基板の組付け位置の調整を行う。
(もっと読む)
プロキシミティ露光装置、プロキシミティ露光装置の基板位置決め方法、及び表示用パネル基板の製造方法
【課題】安価な構成で、チャックのθ方向の傾きを精度良く検出して、基板のθ方向の位置決めを精度良く行う。
【解決手段】第1のステージに搭載されY方向(又はX方向)へ移動する第2のステージに第2の反射手段(35)を取り付け、第2の反射手段(35)のθ方向の位置ずれを検出する。チャック(10a,10b)に複数の光学式変位計(41)を設け、複数の光学式変位計(41)により、第2のステージに取り付けた第2の反射手段(35)までの距離を複数箇所で測定する。第2の反射手段のθ方向の位置ずれの検出結果に基づき、複数の光学式変位計(41)の測定結果から、チャック(10a,10b)のθ方向の傾きを検出し、検出結果に基づき、第3のステージによりチャック(10a,10b)をθ方向へ回転して、基板(1)のθ方向の位置決めを行う。
(もっと読む)
プロキシミティ露光装置、プロキシミティ露光装置の基板位置決め方法、及び表示用パネル基板の製造方法
【課題】経年変化に伴ってレーザー測長系のレーザー光源の出力特性が変化しても、移動ステージの位置を精度良く検出して、基板の位置決めを精度良く行う。
【解決手段】移動ステージに複数の反射手段34a,34b,35を取り付け、複数のレーザー干渉計32a,32b,33により、レーザー光源31a,31bからのレーザー光と各反射手段34a,34b,35により反射されたレーザー光との干渉を複数箇所で測定する。各レーザー干渉計32a,32b,33の測定結果から、移動ステージの位置を検出し、検出結果に基づき、移動ステージによりチャック10a,10bを移動して、基板1の位置決めを行う。各レーザー干渉計32a,32b,33が受光したレーザー光の強度の変化を検出し、検出したレーザー光の強度の変化を補う様に、レーザー光源31a,31bへ供給する駆動電流を制御する。
(もっと読む)
マスク表面粗さ測定方法及び測定装置
【課題】ブランクマスクの欠陥等に起因する測定値の誤り発生を招くこと無しに、ブランクマスクの所望領域の表面粗さを迅速に測定する。
【解決手段】露光用マスクを作製するためのブランクマスクの表面粗さを測定するマスク表面粗さ測定方法であって、ブランクマスクに測定光を入射させ、該マスクによる暗視野像を取得する光学系を用い、該マスク上の任意領域の暗視野像を取得する第1のステップと、任意領域内の注目位置における暗視野像の像強度が予め定めておいたしきい値未満の場合に、該注目位置の周辺領域の像強度と予め定めておいた関係式とを用いて表面粗さを求める第2のステップと、任意領域の全ての点において第2のステップを繰り返し、得られた表面粗さを平均化する第3のステップと、第3のステップで得られた平均値を、任意領域の表面粗さとして出力する第4のステップと、を含む。
(もっと読む)
描画装置
【課題】シリコンなどのウエハー上にレーザー光を用いて露光することで描画を行う描画装置において、ナノミクロンオーダーの高精度な位置決めを行うこと。
【解決手段】レーザー光を一定方向に往復させて所定の間隔でドットパターンの描画を行う光学素子用の描画装置であって、レーザー光を照射する照明光学系と、
基盤を載置するXYステージと前記照明光学系と前記XYステージとの相対位置を測定する前記XYステージ上に設置されたナノスケールと、前記基盤上の描画信号の基準位置とその描画信号波形データ出力と、前記ナノスケールによって測定された往路のドットパターンの描画終了位置から、復路のドットパターンの描画開始位置を抽出する軸制御ユニットと、前記軸制御ユニットによって抽出された描画開始位置から描画を開始するように前記照明光学系の位置を補正する位置補正手段と、を備える。
(もっと読む)
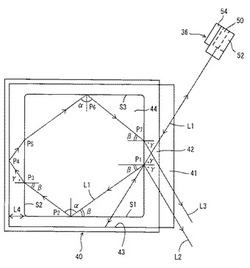
形状測定方法及び形状測定装置
【課題】被検物の表面形状を短時間で測定可能な形状測定方法を提供する。
【解決手段】形状測定方法は、n=1〜N(Nは3以上の整数)とし、参照光の光軸上において異なるN個の位置を第1位置〜第N位置と称するとき、参照面を第n位置に固定し、物体光を被検物の光軸と所定の角度をなす方向から照射して、被検物をその光軸を中心に回転させながら、干渉縞を、被検物上で重複領域を有して隣接し合う複数の領域ごとに取得される複数の第n干渉縞として取得する第n工程を備え、第1工程から第N工程を行う干渉縞画像取得工程S11の後に、複数の領域のそれぞれに対応する干渉縞を用いて位相解析を行い、部分表面形状データを取得する位相解析工程S12と、部分表面形状データを重複領域でつなぎ合わせて被検物の輪帯状領域又は全体の表面形状データを取得する統合工程S13と、を備える。
(もっと読む)
露光装置及び露光方法、並びにデバイス製造方法
【課題】ステージを正確に2次元駆動する。
【解決手段】 XエンコーダとYエンコーダとを少なくとも各1つ含む3つのエンコーダを用いて、ステージWSTの移動面内の位置情報を計測する。ステージWSTの位置計測値に基づいて、位置計測に用いるエンコーダを、エンコーダEnc1,Enc2及びEnc3から、エンコーダEnc4,Enc2及びEnc3に切り換える。切り換えの際、座標つなぎ法又は位相つなぎ法を適宜切り換えて適用して、新たに使用するエンコーダEnc4の初期値を設定する。それにより、ステージWSTの位置計測に用いるエンコーダが逐次切り換えられるにもかかわらず、切り換えの前後でステージの位置計測値が保存され、ステージを正確に2次元駆動することができる。
(もっと読む)
物品認識装置における照明の設定値設定方法および物品認識装置
【解決手段】ボンディング装置を構成する物品認識装置は、基板のバンプに照明光を照射する第1照明と、該第1照明とは異なる角度から上記バンプに照明光を照射する第2照明と、上記バンプで反射した上記照明光の反射光を撮影する第1撮影手段とを備えている。上記第2照明の輝度を固定したまま、第1照明の輝度を変化させて(S3)、上記第1撮影手段が撮影した画像のうち、バンプが最も多く認識された画像を撮影した際における第1照明の輝度を記憶する(S7)。続いて第1照明の輝度を上記記憶した輝度で固定したまま、第2照明の輝度を変化させて(S9)、上記第1撮影手段が撮影した画像のうち、バンプが最も多く認識された画像を撮影した際における上記一方の照明の輝度を記憶する(S13)。
【効果】照明の設定値の設定を容易にかつ安定して行うことができる。
(もっと読む)
プロキシミティ露光装置、プロキシミティ露光装置のギャップ制御方法、及び表示用パネル基板の製造方法
【課題】基板の一面を複数のショットに分けて露光する際、ショット毎に、マスクと基板とがより平行な状態でギャップ合わせを行って、露光精度を向上させる。
【解決手段】マスクホルダ20とチャック10とを相対的にZ方向へ移動及びチルトする複数のZ−チルト機構30と、マスク2と基板1とのギャップを複数箇所で測定する複数のギャップセンサー30とを設ける。予め露光した基板のパターンを測定して、各ギャップセンサー40の測定点におけるショット毎のオフセット値を決める。ショット毎に、各ギャップセンサー40の測定値を、各測定点におけるショット毎のオフセット値で補正し、補正後の補正値に基づいて、複数のZ−チルト機構30によりマスク2と基板1とのギャップ合わせを行う。
(もっと読む)
厚さ測定装置
【課題】貼合わせウェハ全体について厚さを測定できる装置の提供。
【解決手段】貼合わせウェハ1の厚さ測定光学系及び観察光学系と、測定光学系から出力される信号を用いて貼合わせウェハ1の厚さを算出する信号処理装置とを具え、測定光学系は、第1の波長域の測定用光源30と、この測定光を投射して光スポットを形成する対物レンズ17と、その反射光の光検出手段40とを有し、観察光学系は、前記第1の波長域とは異なる第2の波長域の観察用照明光を放出する照明光源41と、照明光を投射する対物レンズ17と、その反射光を受光して2次元画像を撮像する撮像装置48とを有する。これらで共通の対物レンズ17と測定光源及び観察光源との間の光路中には、前記測定光学系と観察光学系とを光学的に結合する波長選択性を有するカップリング素子34を配置する。撮像装置48は、前記測定光により形成された光スポットの像が重畳された像を撮像する。
(もっと読む)
動きを検出するシステム、リソグラフィ装置、およびデバイス製造方法
【課題】誤差の影響を受けにくいが大きな空間を占有しない、改善された精密測定システムを提供する。
【解決手段】本体の動きを検出するシステムであって、本体と、基準フレームに対して実質的に静止して取り付けられた第1回折格子40,42と、本体に取り付けられた第2回折格子50,52と、第1および第2回折格子で回折された一つ以上の放射ビームを受け取り、基準フレームに対する本体の動きを検出するように構成された検出器60,61,62,63と、を備え、検出器60,61,62,63が本体に結合され、本体に対して移動可能である。
(もっと読む)
転写方法および転写装置
【課題】原板が有する凹凸パターンを容易にかつ高い位置精度で基板上の転写液層にインプリントすることのできる技術を提供する。
【解決手段】原板Mの凹凸パターンP面が基板S上に塗布された転写液層UVRに接触した状態で、原板Mおよび基板Sのそれぞれに形成されたアライメントマークALを、1つの認識手段により、両アライメントマークALが重なる方向から同時に撮像して得られた1つの画像から両アライメントマークALの位置を別々に認識処理することで原板Mと基板Sとのアライメントを行う。そのため、撮像された原板Mおよび基板Sのアライメントマーク画像に相対的な位置誤差が生じるおそれがなく、振動や異なる走査タイミングに起因する位置誤差が生じることを防止できる。
(もっと読む)
41 - 60 / 1,976
[ Back to top ]