
Fターム[2F065PP12]の内容
光学的手段による測長装置 (194,290) | 装置全体の構造 (6,881) | 対象物保持、載物手段 (3,708) | 移動テーブル (2,675)
Fターム[2F065PP12]の下位に属するFターム
回転のみ (699)
Fターム[2F065PP12]に分類される特許
61 - 80 / 1,976
車両用ミラー制御装置
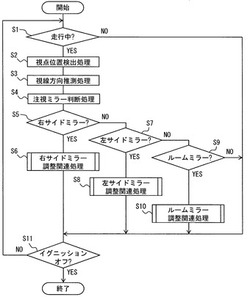
【課題】車両用ミラーの鏡面角度をドライバにとって好適な角度に自動的に調整しながらも、乗員にとっての快適性を損ない難くすることを可能にする。
【解決手段】車両が走行中と判定した場合であって、且つ、いずれかの車両用ミラーをドライバが見ていると判断した場合には、ドライバが見ている車両用ミラーであると判断した車両用ミラーの最適角度を算出し、その算出結果に基づいて当該車両用ミラーについてのみ鏡面角度の調整を行う一方、車両が走行中でないと判定した場合、若しくは車両が走行中と判定した場合であって、且つ、いずれの車両用ミラーもドライバが見ていると判断しなかった場合には、車両用ミラーの鏡面角度の調整を行わない。
(もっと読む)
変位測定装置及び光無線通信システム

【課題】光無線通信システムのトラッキング機構の小型化、測定精度向上等を実現する。
【解決手段】送信ユニット11に2つの距離センサ14,15を設け、受信ユニット21に位置指標部23と基準高さ部24を設ける。位置指標部23は、複数のエリアに区画され且つ各エリア毎に高さが異なる三次元形状に形成され、基準高さ部24を基準とした各エリアの高さとエリア位置との関係を変位測定テーブルデータとして記憶する。各距離センサ14,15によって位置指標部23の1つのエリアまでの距離と基準高さ部24までの距離をそれぞれ測定し、これら2つの距離測定値の差分と変位測定テーブルデータとに基づいて位置指標部23のうちの第1の距離センサ14で測定したエリア位置を特定することで、受信ユニット21の変位量及び変位方向を判定し、その判定結果に基づいて送信部12と受信部22との光軸ずれを補正するように光軸ずれ補正機能を作動させる。
(もっと読む)
位置制御システム、露光装置、及び露光方法
【課題】1つの実施形態は、例えば、基板の表面の位置の計測精度を向上できる位置制御システム、露光装置、及び露光方法を提供することを目的とする。
【解決手段】1つの実施形態によれば、面位置計測部と制御部とを有する位置制御システムが提供される。面位置計測部は、基板の表面の高さ方向の位置を計測する。制御部は、面位置計測部による計測結果に基づいて、光学系と基板の表面との相対的な位置を制御する。面位置計測部は、複数のフォーカスセンサ41−1〜41−3と駆動部42とを有する。駆動部は、基板の表面に対する複数のフォーカスセンサの基板面内方向の位置を独立して駆動する。
(もっと読む)
パターン検査装置及びパターン検査方法
【目的】マスクに形成されたパターン自体の位置精度の均質性を検査可能な検査装置を提供する。
【構成】検査装置100は、離散的な領域を撮像した際に取得されたそれぞれの光学画像中の図形の寸法と、対応する参照画像中の図形の寸法との間での第1の位置ずれ量を用いて、被検査領域全体における第1の位置ずれ量マップを作成するマップ作成回路131と、検査領域全体を撮像した際に取得されたそれぞれの光学画像中の図形の寸法と、それぞれ対応する参照画像中の図形の寸法との間での第2の位置ずれ量を用いて、被検査領域全体における第2の位置ずれ量マップを作成するマップ作成回路132と、第2の位置ずれ量マップを、第1の位置ずれ量マップと第2の位置ずれ量マップとの第1の差分マップで補正した第3の位置ずれ量マップに定義される各値のうち、許容値を超える値の有無を判定する判定回路156と、を備えたことを特徴とする。
(もっと読む)
光学特性測定装置および光学特性測定方法
【課題】本発明は、取得したスペクトルから基板上に形成した膜の複数の測定点に対する光学定数を唯一の値として求めることができる光学特性測定装置および光学特性測定方法を提供する。
【解決手段】本発明は、光源10と、検出器40と、データ処理部50とを備えている。データ処理部50は、モデル化部と、解析部と、フィッティング部とを備えている。複数の膜モデル式を連立させ、複数の膜モデル式に含まれる光学定数が同一であるとして所定の演算を行ない、算出した膜の膜厚および光学定数を膜モデル式に代入して得られる波形と、検出器40で取得した波長分布特性の波形とのフィッティングを行なうことにより、複数の膜モデル式に含まれる光学定数が同一で、解析部で算出した膜の膜厚および光学定数が正しい値であることを判定する。
(もっと読む)
転写方法および転写装置
【課題】原板が有する凹凸パターンを容易にかつ高い位置精度で基板上の転写液層にインプリントすることのできる技術を提供する。
【解決手段】原板Mの凹凸パターンP面が基板S上に塗布された転写液層に接触した状態で、原板Mおよび基板のそれぞれに形成されたアライメントマークを、1つの認識手段3により、両アライメントマークが重なる方向から、一方のアライメントマークを撮像した後、他方のアライメントマークを撮像し、得られた両アライメントマークの画像にそれぞれ位置誤差補正処理を行う。そのため、補正後の両アライメントマーク画像を用いて高精度なアライメントを行うことが可能になる。
(もっと読む)
形状計測装置、横座標校正方法及び光学素子の製造方法
【課題】汎用性の高い横座標の校正方法によって横座標を校正する形状計測装置、及びその横座標校正方法を提供する。
【解決手段】複数の開口が形成され、これら複数の開口の配列によって校正パターンを形成するアパーチャー板20をワークWの被検面Wsの前面に配置する。この開口を通過すると共に、被検面Wsで反射され、再度開口を通過した測定光Lmを撮像素子5によって検出する。撮像素子上にて結像した校正パターンの横座標位置と、予め計測されている校正パターンの基準横座標位置とを、演算装置7によって比較することによって、形状計測装置1の横座標を校正する。
(もっと読む)
校正原器、形状計測装置、横座標校正方法及び光学素子の製造方法
【課題】汎用性の高い校正原器を提供し、一つの校正原器で種々の形状計測装置の横座標の校正を可能にする。
【解決手段】形状計測装置の横座標を校正する際にワークの代わりに配置される校正原器20に、入射角度に係わらず光を元来た方向に反射する再帰性光学素子21を設け、この再帰性光学素子21によって測定光Lmを反射させる。校正原器20は、再帰性光学素子21によって反射するため、種々の曲率半径の測定光を元来た方向に反射することができ、これによって、種々の形状計測装置の横座標の校正に使用することができる。
(もっと読む)
画像測定装置及び画像測定方法
【課題】操作者の手間が少なく、画像中の図形情報の測定を迅速且つ確実に行う。
【解決手段】CPU41は、撮像ユニット17で撮像された被測定対象物の画像を取り込み、取り込んだ画像に含まれる図形の輪郭線をハフ変換によって検出し、検出した輪郭線上にエッジ検出ツールを設定し、設定されたエッジ検出ツールにより、前記図形に関する図形情報の測定を行う。
(もっと読む)
ワーク接触点補正システムおよび旋盤
【課題】簡単かつ高精度に、ワークの被接触面に対するワーク接触部材の接触点の位置を補正できるワーク接触点補正システムおよび旋盤を提供することを課題とする。
【解決手段】ワーク接触点補正システム2は、ワークWの被接触面W1の形状に沿って、該被接触面W1に対する接触点が変化するワーク接触部材21と、ワーク接触部材21を撮像する撮像装置24と、撮像装置24が撮像した画像からワーク接触部材21の外形線に関する実測データR1を取得し、実測データR1を基に接触点の位置を補正する演算部220aを有する制御装置22と、を備えることを特徴とする。
(もっと読む)
高さ計測装置及び方法
【課題】被計測物が様々な屈折率で、かつ様々な厚さの透明媒質の下に配置されていても、その被計測物の高さを容易に計測する。
【解決手段】高さ計測装置1は、照明光から分岐された第1照明光を被計測物6に導く対物レンズ24と、照明光から分岐された第2照明光を参照ミラー28に導く対物レンズ26と、第2照明光の光路長を調整する移動部36と、被計測物6及び参照ミラー28で反射される2つの照明光の干渉像を撮像する高速度カメラ12と、対物レンズ24と被計測物6とを光軸方向に相対移動するピエゾ駆動装置18と、を備える。
(もっと読む)
遊戯板の障害釘の高さ検査装置および検査方法と遊戯盤
【課題】遊戯盤に植設される釘は植設される位置、および高さが所定の範囲内でなければならない。しかし、所定の高さより高い釘を見つける方法は、すでに開示されているが、所定の高さより低い釘を高速にしかも釘にダメージを与えることなく見つけるのに、適した方法はなかった。
【解決手段】前記遊戯盤を所定の速度で搬送する移送手段と、前記遊戯盤の垂直方向に視軸が配置された第1のラインセンサと、視軸が前記第1のラインセンサの視軸から所定の角度傾き、かつ前記視軸が前記第1のラインセンサの視軸と交わる交線が、前記遊戯盤の前記釘の頭と同じ高さに配置される第2のラインセンサと、前記釘の頭を前記第1のラインセンサが撮影した地点と前記第2のラインセンサが撮影した地点の間の距離に基づいて、前記釘の高さを算出する制御装置を有する検出する検査装置。
(もっと読む)
検査装置、リソグラフィ装置、リソグラフィプロセシングセルおよび検査方法
【課題】回折次数の重なりを防止しつつ基板の特性を精度良く求める技術を提供する。
【解決手段】角度分解分光法に対しては、4つのクアドラントを有する照明プロファイルを有する放射ビームが使用される。第1および第3クアドラントが照明される一方、第2および第4クアドラントは照明されない。したがって、結果として生じる瞳面は4つのクアドラントに分けられ、ゼロ次回折パターンのみが第1および第3クアドラントに現れて一次回折パターンのみが第2および第3クアドラントに現れる。
(もっと読む)
画像計測装置及びコンピュータプログラム
【課題】計測結果が計測対象物のどの部分のどの計測結果であるのかを使用者が的確に把握することができる画像計測装置及びコンピュータプログラムを提供する。
【解決手段】撮像手段で取得した計測対象物の画像を表示し、表示された画像上で特徴画像、及び計測位置の指定を受け付ける。指定を受け付けた特徴画像と、計測位置及び該計測位置を示す寸法線の表示位置を表す、特徴画像に対する相対位置に関する情報とを記憶しておく。新たに取得した計測対象物の画像と記憶してある特徴画像とを照合し、計測対象物の画像の姿勢及び位置に関する情報を特定する。姿勢及び位置が特定された計測対象物の画像に対して計測位置を設定し、該計測位置のエッジ部分を検出して、所定の物理量を計測する。記憶された寸法線を表示する特徴画像に対する相対位置に関する情報に基づいて、計測位置を示す寸法線及び計測結果を所定の位置に表示する。
(もっと読む)
外観検査方法及びその装置
【課題】複雑形状をした物体の外観検査において、目視では検出困難な形状の不良を定量的に評価し、検出する物体の外観検査方法及びその装置を提供することにある。
【解決手段】
物体の外観を検査する方法を、検査対象物体を載置して少なくとも一方向に連続的に移動させながら検査対象物体を撮像して検査対象物体の表面のテクスチャ情報を含む検査対象物体の画像を取得しながら検査対象物体の表面凹凸情報を取得し、この取得した検査対象物体の表面凹凸情報から検査対象物体の立体形状を復元し、取得した画像と復元した検査対象物体の立体形状とから表面テクスチャを持った物体の外観情報を得、この得られた外観情報から複数の特徴を抽出し、この抽出した複数の特徴のうち少なくとも1つの特徴を予め設定した参照データの前記少なくとも1つの特徴に対応する特徴と比較して検査対象となる物体の外観を評価するようにした。
(もっと読む)
位置検出装置、インプリント装置及び位置検出方法
【課題】 位置合わせに用いるマークからの光量を多くして検出しやすくする位置検出装置、及び、それを用いたインプリント装置を提供する。
【解決手段】 本発明の位置検出装置は、第一方向と、第一方向と異なる第二方向にそれぞれ周期をもつ第一回折格子と、第1回折格子の第二方向の周期と異なる周期を第二方向にもつ第二回折格子と、を斜入射照明する照明光学系と、第一回折格子と第二回折格子とからの回折光を検出する検出光学系と、を備え、検出した回折光に基づいて第一回折格子と第二回折格子との第二方向に関する相対的な位置を検出する位置検出装置であって、照明光学系はその瞳面において、第一方向に、複数の極を有する光を照明することを特徴とする。
(もっと読む)
欠陥計測方法
【課題】光学素子の欠陥を簡便に発見、測定することのできる欠陥計測方法を提供する。
【解決手段】第一の観点に係る欠陥計測方法は、測定対象に光源から光を照射し、収束光にして測定対象に入射し、測定対象又は光源を、収束光の焦点が測定対象の一方の面から他方の面に至るまで移動させ、測定対象の一方の面と測定対象中に存在した欠陥との間の距離を計測し、距離に測定対象の屈折率を乗じた値を求め、一方の面からの前記欠陥の深さを計算する。
(もっと読む)
エンコーダ装置、光学装置、及び露光装置
【課題】光学系の高さを低くするとともに、回折格子からの0次光の影響を低減して計測精度を向上する。
【解決手段】X軸のエンコーダ10Xは、第1部材6に設けられ、X方向を周期方向とする回折格子12Xと、可干渉性のある計測光MX1及び参照光RX1を供給するレーザ光源16と、第2部材7に設けられ、計測光MX1を回折格子12Xに向けてリトロー角から所定角度ずれた角度で反射する傾斜ミラー32XAと、回折格子12Xからの回折光と参照光RX1との干渉光を検出する光電センサ40XAと、光電センサ40XAの検出信号を用いて第1部材6に対する第2部材7のX方向の相対移動量を求める計測演算部42Xと、を備える。
(もっと読む)
エンコーダ装置、光学装置、及び露光装置
【課題】回折格子を用いて計測する際に、干渉用の光学系をコンパクトに配置可能として、かつ格子パターン面の高さ変化に対する干渉光強度の低下を抑制する。
【解決手段】エンコーダ10Xは、第1部材6に設けられたX軸の回折格子12Xと、計測光MX1,MX2を回折格子12Xの格子パターン面12Xbにほぼ垂直に入射させるレーザ光源16と、第2部材7に設けられて、回折格子12Xから計測光MX1によって発生する回折光DX1を回折格子12Xに再度入射させる直角プリズム26Aと、回折光DX1によって発生する回折光DX2と他の回折光EX2との干渉光を検出する光電センサ40Xと、を備える。
(もっと読む)
基板検査装置および基板検査方法
【課題】基板に形成された凹部の形状を、非破壊、非接触にて検査する技術を提供する。
【解決手段】基板検査装置100は貫通ビアWH(凹部)が形成されている基板Wを検査する。基板検査装置100は、ポンプ光の照射に応じて、基板Wに向けてテラヘルツ波を照射する照射部12と、プローブ光の照射に応じて、基板Wを透過したテラヘルツ波の電場強度を検出する検出部13と、テラヘルツ波が基板Wの貫通ビア形成領域を透過する透過時間と平坦領域を透過する透過時間との時間差を取得する時間差取得部24と、該時間差に基づいて貫通ビアWHの深度を算出するビア深度算出部26とを備える。また、基板検査装置100は、ビア深度算出部26により算出した貫通ビアWHの算出深度と、干渉法を利用する深度測定装置16によって測定した貫通ビアWHの実測深度とに基づいて、貫通ビアWHの形状を示す形状指標値を取得する形状指標取得部27を備える。
(もっと読む)
61 - 80 / 1,976
[ Back to top ]