
Fターム[2F065QQ51]の内容
光学的手段による測長装置 (194,290) | 信号処理 (28,761) | カウンター (263)
Fターム[2F065QQ51]の下位に属するFターム
カウント開始点 (7)
カウント終了点 (1)
カウント値ホールド、ラッチ (1)
Fターム[2F065QQ51]に分類される特許
201 - 220 / 254
一眼レフデジタルカメラにおけるピクセル面とマット面の取付位置の測定方法とそのための装置
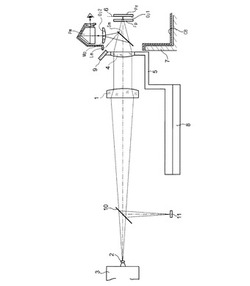
【課題】 一眼レフデジタルカメラの撮像素子が設けられているピクセル面と、ファインダーに撮影しようとする画像を提示するマット面は、当該カメラの対物レンズの焦点に、共役点として設けられているかどうかを、同一の測定装置により同じ測定工程において測定し、2つの取付位置の精度と誤差を瞬時に判断できる測定方法並びに測定装置を提供すること。
【解決手段】 一眼レフデジタルカメラにおけるピクセル面Peとマット面Mpを対象面Oj1,Oj2とし基準点からチャートパターン像を出射して前記2つの対象面Oj1,Oj2に設定した測定点に対物レンズ4を通して結像させるとき、前記対物レンズ4を前後動させて前記測定点からの反射像を前記基準点の共役点において光−電気的に検出し、前記反射像のコントラストが最も強いときの検出値に基づいて前記ピクセル面Peとマット面Mpの実際の取付位置と基準取付位置の差を測定すること。
(もっと読む)
ステージ位置変動情報取得方法および装置

【課題】 ステージを移送するとともに、その移送方向についての各位置毎のステージの位置変動情報を取得するステージ位置変動情報取得方法および装置において、小型化およびコストの削減を図る。
【解決手段】 予め設定された基準マーク位置情報に基づいて基準マーク80aを移動ステージ移送方向に所定の間隔を空けて配置した基準マーク列を、移動ステージ移送方向に直交する方向に所定の間隔を空けてそれぞれ設けたガラスチャート80を移動ステージ14上に設置し、ガラスチャート80に設けられた基準マーク列の基準マーク80aを移動ステージ14の移送とともに基準位置マーク位置情報に応じたタイミングでカメラ26によって順次撮像し、撮像された基準マーク80aの画像の位置に基づいて検出位置情報を順次取得し、その取得された検出位置情報と基準マーク位置情報とに基づいて移動ステージの位置変動情報を取得する。
(もっと読む)
カラー画像形成装置
【課題】位置ずれの補正において、汎用のフォトセンサーのような安価なセンサーを使用すると、パターンを検出する際に拡散反射光の影響により検出波形がひずんでしまい、それにより測定誤差が発生するため高精度の検出が難しいという欠点があった。
【解決手段】上記課題を解決するために本発明では、汎用のフォトセンサーを使用した場合に発生する拡散反射光による検出波形のひずみ量が測定誤差量と一定の関係があることに着目し、ひずみ量を計測して測定誤差を補正する検出方法を採用している。
(もっと読む)
粒状製品の評価方法
【課題】概ね一定の大きさの粒状製品が概ね等間隔に配置されている粒状製品の大きさの均一性と個数を全体の傾向として評価する方法を提供する。
【解決手段】粒状製品を撮像して得られる濃淡画像を所定の閾値により二値化し、抽出した粒領域にラベリング処理を行い、各粒領域の面積を求め、予め設定した第1の面積閾値に満たない面積をもつ粒領域をノイズとして評価対象から除外し、第1の面積閾値以上で第2の面積閾値未満の面積をもつ粒領域を正常粒領域として抽出し、その数および正常粒領域の面積の総和を求め、第2の面積閾値以上の面積をもつ粒領域を異常粒領域として抽出し、その数および異常粒領域の面積の総和を求め、正常粒数、正常粒総面積、異常粒数および異常粒総面積について基準値と比較し、正常粒数または正常粒総面積が基準値に満たない場合、あるいは異常粒数異常粒総面積が基準値を超える場合に当該粒状製品の品質が不均一であると判定する。
(もっと読む)
移動体計測装置及び移動体の計測方法
【課題】 移動体の計測作業の効率を向上させることである。
【解決手段】 移動体を撮影した画像を再生しながら、移動体指定部13により計測すべき移動体の位置を順次指定すると、各計測位置における画像のフレーム番号と移動体の位置データが計測情報記憶部15に順に登録される。そして、計測途中では、計測済みの計測位置と、各計測位置を結ぶ線が表示されるので次に計測すべき移動体がどれかを画面上で簡単に判別できる。
(もっと読む)
画像処理装置
【課題】 画像読み取りガラス面の所定位置に3次元物体を時間や手間をかけずに簡単に画像を読み取り解析する画像処理装置を提供する。
【解決手段】 スキャナ装置10には画像読み取りガラス面11の周囲に設けられたスライダー20とスライダー20に連動してスライド移動して3次元物体の案内となるガイド30とスライド移動後のガイド30の座標位置を検出するカウンタ40を備えている。スキャナ装置10により読み取った画像データとガイド30の座標位置データが画像データ処理部50に送られる。座標変換機能52により読み取り画像データを座標変換する。さらにイメージノギス機能53によりあらかじめ設定されている特定個所のサイズを計測し、良品・不良品のチェックをする。
(もっと読む)
2自由度センサ
【課題】 小型であり、2自由度運動量を検出可能な、出力誤差の小さい2自由度センサを提供する。
【解決手段】 A、B2方向の運動量を検出する2自由度センサであって、可動部あるいは固定部に設置され、A方向から見て一定幅tAで配置される凹凸と、かつB方向から見て一定幅tBで配置される凹凸を持つ検出対象400と、前記検出対象の凹凸面に対向して設置され、B方向から見た検出面の幅がtBと等しく、かつA方向から見た幅がtAの2×m倍の対向面を持つ素子を有する第1の検出部402と、検出対象の凹凸面に対向して設置され、A方向から見た検出面の幅がtAと等しく、かつB方向から見た幅がtBの2×n倍の対向面を持つ素子を有する第2の検出部404と、前記第1、第2の検出部の出力変化からA方向運動量およびB方向運動量をそれぞれ算出する演算処理部とを有する。
(もっと読む)
画像処理装置
【課題】 画像読み取りガラス面の所定位置に3次元物体を時間や手間をかけずに簡単に画像を読み取り解析する画像処理装置を提供する。
【解決手段】 スキャナ装置10には画像読み取りガラス面11の周囲に設けられたスライダー20とスライダー20に連動してスライド移動して3次元物体の案内となるガイド30とスライド移動後のガイド30の座標位置を検出するカウンタ40を備えている。スキャナ装置10により読み取った画像データとガイド30の座標位置データが画像データ処理部50に送られる。座標変換機能52により読み取り画像データを座標変換する。さらにイメージノギス機能53によりあらかじめ設定されている特定個所のサイズを計測し、良品・不良品のチェックをする。
(もっと読む)
プール可動床装置
【課題】可動床の高さ位置を、1つの簡易な手段で容易、かつ、正確に検出することができる、構成が簡易で、この種の装置の大幅なコストダウンを図ることができるプール可動床装置を提供する。
【解決手段】可動床と、可動床を昇降させる可動床駆動装置と、該可動床の昇降位置を検出する位置検出装置を備えたプール可動床装置において、上記位置検出装置は、上記可動床駆動装置の駆動軸の回転を介して従動する回転ディスクと、該回転ディスクに所要間隔毎に開設された複数の透孔と、該透孔に光を照射する手段と、上記透光を通過した光を受信する手段と、を有して構成され、受光された光信号の数で、可動床の昇降位置を検出するように構成した。
(もっと読む)
干渉計の非線形性補償システム及び方法
【課題】 ヘテロダイン干渉計にも用いられる安価な干渉計システムを提供すること。
【解決手段】
計測信号(113)から生成された干渉計位置データを非線形性補償する方法であって、受信したデジタル位置値(204)に基づいて第1の組の非線形性パラメータ(214M及び214P)を生成する工程を含んでいる。この方法は、低速度状態が存在しているかどうかを検知する工程(208及び216)をさらに含んでいる。そして、前記低速度状態が存在する場合に、前記計測信号の計測された大きさ(218)に基づいて前記第1の組の非線形性パラメータの中の第1の非線形パラメータが更新される。また、前記低速度状態が存在する場合に、更新済みの非線形性パラメータに基づいて、少なくとも1つのデジタル位置値が補償される。
(もっと読む)
反射形レーザ測長器
【課題】 レーザ光の偏光方向に起因する問題を解消して、レーザ光の自己結合効果を確実に生起して計測対象物までの距離を信頼性良く計測することのできる簡易な構成の反射形レーザ測長器を提供する。
【解決手段】 VCSEL型のレーザダイオードのような自己結合型のレーザ素子から波長変調したレーザ光を計測対象物に照射すると共に、上記計測対象物により反射されて前記レーザ素子に戻った反射レーザ光と前記照射レーザ光との自己結合作効果により生じる変調レーザ光を解析して前記測定対象物までの距離を測定する反射形レーザ測長器であって、特に前記計測対象物に前記レーザ光を反射する再帰反射体を、具体的には照射レーザ光を反射して円偏波した反射レーザ光を得るコーナキューブリフレクタまたはキャッツアイリフレクタを設ける。
(もっと読む)
ダイアライザー検査装置
【課題】 ダイアライザーの外観を高い検査精度で検査する。
【解決手段】 ダイアライザー検査装置は、外形が略円筒形状のダイアライザー100の外観を検査する装置であって、円筒の中心軸と円筒の頂面とを接続した法線を含む平面上には、2台のラインセンサカメラ310,320と、2台のラインセンサカメラ310,320を挟むように設けられた3台の照明用ライトガイド330,340,350が設置されている。2台のラインセンサカメラ310,320は、法線に対して30度ずつ左右に対称になるように配置される。また3台の照明用ライトガイド330,340,350は、その1台が法線上に、残りの2台が60度ずつ法線を対称として配置される。
(もっと読む)
距離・速度計および距離・速度計測方法
【課題】自己結合型のレーザ計測器の利点を活かしつつ、測定対象との距離と測定対象の速度を計測する。
【解決手段】距離・速度計は、半導体レーザ1と、半導体レーザ1に、発振波長が連続的に増加する第1の発振期間と発振波長が連続的に減少する第2の発振期間とを交互に繰り返させるレーザドライバ4と、半導体レーザ1の光出力を電気信号に変換するフォトダイオード2と、フォトダイオード2の出力に含まれる、半導体レーザ1の出力光と測定対象11からの戻り光との半導体レーザ1内での干渉に基づくパルスの数を、第1の発振期間と第2の発振期間の各々について数える計数手段5〜8と、半導体レーザ1の最小発振波長と最大発振波長と計数手段の計数結果から測定対象11との距離及び測定対象11の速度を算出する演算手段9とを有する。
(もっと読む)
ディスク原盤の製造方法、ディスク原盤の製造装置、ディスク原盤の移動距離差検出方法、およびディスク原盤の移動距離差検出装置
曲率をもって移動する水平移動デバイスを使用して正確なディスク原盤の送り精度を実現する、ディスク原盤の製造方法を提供すること。 レジスト原盤108を自転させる工程と、前記レジスト原盤108を移動させる工程と、前記移動に伴う前記レジスト原盤108の中心点の軌跡上の移動距離を読みとる工程と、前記中心点の軌跡上の移動距離と、前記移動に伴う前記レジスト原盤108の中心点の直線上の移動距離との差を検出する工程と、前記検出結果に基づいて、所定の製造パラメータを制御する工程とを備える、ディスク原盤の製造方法。 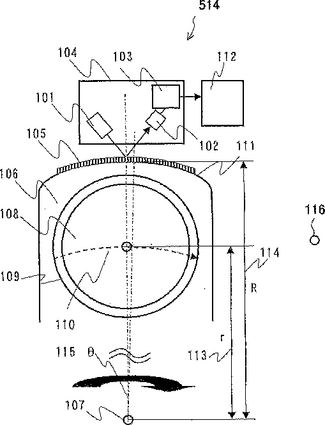 (もっと読む)
(もっと読む)
欠点検出システム
【課題】 ガラス板縁部における欠点を高精度に検査することを可能としつつ、検査時の位置決め作業を不要とする。
【解決手段】 本発明による欠点検出システムは、コンベア上に設定される縁部検査セクションまで搬送姿勢検出セクションを介してガラス板を搬送する搬送機構と、搬送姿勢検出セクションに設けられ、姿勢検出用の撮像手段106及び光源104を用いて、縁部検査セクションに搬送されるガラス板の搬送姿勢を検出する搬送姿勢検出装置と、縁部検査セクションに設けられ、欠点検出用の撮像手段212及び光源214が組み込まれたカメラ組立体210を、ガラス板の縁部に沿ってガラス板の全周に亘りカメラ組立体を移動させ、その際に撮像手段212により取得されるガラス板の縁部の画像情報に基づいて、ガラス板の縁部における欠点を検出する縁部検査装置と、を含み、カメラ組立体210の移動軌跡が、前記搬送姿勢検出装置から得られるガラス板の搬送姿勢情報に基づいて決定される。
(もっと読む)
金属製キャップの不良検査方法、この検査のための調整方法、および金属製キャップの不良検査装置
【課題】 金属性キャップの下端縁に生じる不良を、精度良く検出できるようにする。
【解決手段】 リング状光源による照明部2により、検査対象のボトル缶を斜め上方から照明するとともに、4台のカメラ1A,1B,1C,1Dにより、キャップを含むボトル缶の上部を全周にわたって撮像する。画像処理装置3は、各カメラ1A,1B,1C,1Dから画像を取り込み、それぞれの画像の首部の部分に検査領域を設定して影領域を検出する。いずれかの画像において影領域が検出されると、検査対象のボトル缶は不良品であると判断される。
(もっと読む)
性能評価方法及び露光方法
【課題】露光装置の性能を高精度に評価する。
【解決手段】走査露光装置における露光スリット内に同時に含まれる複数のマーク像の重ね合わせ誤差に含まれるスケーリング成分、オフセット成分、回転成分などの1次成分のみを、露光装置の性能に関係する成分として抽出し、それ以外の成分はウエハの変形などの露光装置の性能には無関係な成分として除去する。そして、その1次成分のばらつき具合の指標値を露光装置の性能評価値とする。
(もっと読む)
溶接部の検査方法および検査装置
【課題】 ワークに形成されたスポット溶接部の数と位置を精度良く検査することができる検査装置を提供する。
【解決手段】 溶接部12を検査するための検査装置10は、ロボットアーム21に設けられたレーザセンサ22と、レーザセンサ22をワーク11の表面に沿って移動させる制御部23と、判定部24と、表示装置25などを備えている。判定部24は、レーザセンサ22をワーク11に対して等速度で移動させている間に、レーザセンサ22からワーク表面11aに向けてレーザビームを照射し、その反射光に基いてレーザセンサ22からワーク11までの距離を検出する。こうして検出された波形を微分化することにより、レーザセンサ22からワーク11までの距離の変化量を求める。そしてこの変化量がしきい値を越えたとき、レーザビームが照射された個所にスポット溶接部12が存在したと判断する。
(もっと読む)
微小高さ測定方法及びそれに用いる微小高さ測定装置並びに変位ユニット
【課題】 被測定物上の測定点を任意に選択可能として被測定物上の測定点の高さを高速で測定する。
【解決手段】 対物レンズ3の焦点位置と光学的に共役の関係に配置され、光源2からの光ビームが被測定物1方向に反射するように傾く複数のマイクロミラー10(1,1)〜10(m,n)をマトリクス状に配列した測定点選択手段4と、被測定物1上に集光された光ビームの集光点からの反射及び散乱光を測定点選択手段4を介して検出する光検出手段5と、被測定物1を対物レンズ3に対してその光軸方向に相対的に変位させてその変位量を検出する変位手段6と、測定点選択手段4の各マイクロミラー10(1,1)〜10(m,n)を個別に駆動すると共に、光検出手段5で検出された光の輝度及び変位手段6で検出された被測定物1の変位量のデータから最大輝度値を示す変位量を被測定物1の高さとして求める制御手段7とを備えたものである。
(もっと読む)
平板の厚みムラ測定方法および装置
【課題】被測定対象であるウエハなどの平板の表面と背面との形状差である厚みムラの凹凸判定を干渉縞を用いて測定することは複雑であった。
【解決手段】ウエハ5を光源1の照明光によりコリメータレンズ4を通して照明し、ウエハ5から反射した該照明光の反射光を干渉縞として撮像手段3により撮像し、該干渉縞からウエハの厚みムラ測定する際、撮像手段3により撮像して得られた画像に対し、所定サイズに区分けした複数の検査領域を対応させ、該検査領域内に存在する干渉縞の間隔が所定数を越えていると、当該被測定体の厚みムラが予め設定した許容値を越えていると判定し、また光源1と撮像手段3とが光軸中心線L0に対する角度を等しく変化させると干渉縞の生成に変化が生じ、この変化によりウエハの凹凸を判定する。
(もっと読む)
201 - 220 / 254
[ Back to top ]