
Fターム[2F069GG01]の内容
測定手段を特定しない測長装置 (16,435) | 測定方式 (4,762) | 接触式 (619)
Fターム[2F069GG01]の下位に属するFターム
測定圧に言及するもの (35)
Fターム[2F069GG01]に分類される特許
101 - 120 / 584
プレス金型の動的変形測定方法および装置
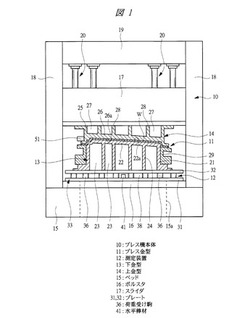
【課題】プレス金型にセンサを取り付けることなく、プレス成形時におけるプレス金型の動的変形を高精度で測定し得るようにする。
【解決手段】プレス金型の動的変形測定装置は、下金型13および上金型14を備えたプレス金型11と、ボルスタ16およびスライダ17を備えたプレス機本体10との間に着脱自在に配置される測定治具本体33を有し、プレス成形時におけるプレス金型11の動的変形を測定する。測定治具本体33に両端部が滑り支持された水平棒材41には、プレス金型11の弾性変形量を検出するための渦電流変位センサが設けられている。測定治具本体33に設けられた荷重受け駒36には、プレス金型11の圧力分布を検出するための歪みゲージが設けられている。
(もっと読む)
照明付きプローブ端を有する座標測定機および動作方法
可搬型の関節アーム座標測定機(AACMM)が、提供される。AACMM(100)は、反対側にある第1の端部および第2の端部を有する手動で位置付けることが可能な関節アーム(104)を含む。アーム(104)は、複数の接続されたアームセグメント(106、108)を含み、アームセグメント(106、108)のそれぞれは、位置信号を生成するための少なくとも1つの位置トランスデューサを含む。測定デバイス(118)が、AACMM(100)の第1の端部に装着される。トランスデューサからの位置信号を受信するための、および測定デバイス(118)の位置に対応するデータを提供するための電子回路(210)が、設けられる。光源(402)が、アーム(104)に結合され、測定デバイス(118)の近くに光を放射するように配置される。 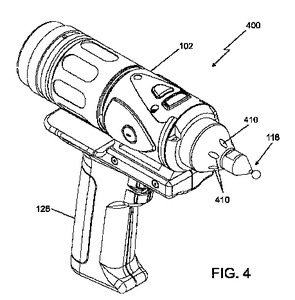 (もっと読む)
(もっと読む)
統合された部品温度測定システム
例示的な実施形態は、可搬型の関節アーム座標測定機であって、反対側にある第1の端部および第2の端部を有する手動で位置付けることが可能な関節アームであって、複数の接続されたアームセグメントを含み、アームセグメントのそれぞれが、位置信号を生成するための少なくとも1つの位置トランスデューサを含む、アームと、関節アーム座標測定機の第1の端部に装着された測定デバイスと、トランスデューサからの位置信号を受信するための、および測定デバイスの位置に対応するデータを提供するための電子回路と、電磁放射に反応し、物体の温度に応じて電気信号を生成する、関節アーム座標測定機に配置される少なくとも1つのセンサ要素と、電気信号を温度値に変換する電子システムとを含む、関節アーム座標測定機を含む。  (もっと読む)
(もっと読む)
駆動装置および測定装置

【課題】鉛直方向への駆動精度を向上させる
【解決手段】Z軸スピンドル19は、エアベアリング22−1および22−2により鉛直方向への移動がガイドされる。シャフトモータ23は、鉛直方向に延びるように配置されるシャフト25と、シャフト25に対して非接触で、シャフト25に沿った方向にZ軸スピンドル19を駆動させる駆動力を発生するスライダ26から構成される。また、エアシリンダ29は、シャフトモータ23のシャフト25によりZ軸スピンドル19の重量を支持し、Z軸スピンドル19の重量に見合う押上力を、Z軸スピンドル19の移動に応じて発生する。本発明は、例えば、プローブにより形状を測定する三次元測定装置に適用できる。
(もっと読む)
物体の三次元の表面形状の評価方法及び評価装置並びに車両用窓ガラスの製造方法
【課題】本発明は、物体の三次元の表面形状の評価方法及び評価装置並びに車両用窓ガラスの製造方法に関し、物体の三次元の表面形状を評価するうえでその表面に形成される反射歪みの定量的な検出を可能にすることにある。
【解決手段】対象物体の三次元の表面形状のデータを取得させると共に、その取得された表面形状のデータの2次微分値を算出させる。また、対象物体に要求される三次元の仮想形状データを算出させると共に、その算出された仮想形状データの2次微分値を算出させる。そして、その算出された対象物体の三次元の表面形状の2次微分値と、仮想形状データの2次微分値との差を算出させ、その差に基づいて、対象物体の表面形状を評価させる。
(もっと読む)
測定オブジェクトの形状を触覚光学式に決定するための方法および装置
本発明は、座標測定装置内のワークピースの構造および/または形状を、触覚光学式の測定法によって決定するための方法であって、少なくとも1つの方向における接触型プローブ要素の位置を、光学的に横方向に測定する方法で、第1のセンサによって決定し、かつ、少なくとも1つの第2の方向における接触型プローブ要素の位置を、少なくとも1つの距離センサによって決定する方法に関する。複数のセンサによる接触型プローブ要素の誤りのない検出を可能にするために、接触型プローブ要素を保持手段に取り付けるために、第1のセンサの光路によってビーム方向に貫通される少なくとも1つの柔軟な接続要素を使用し、該接続要素は透明であり、および/または第1のセンサに対し大幅に焦点を外して設けられることが提案される。 (もっと読む)
一体化したターニング・センタを有する非接触検査システム
【課題】ロータの機械加工と非接触検査システムを一体化する。
【解決手段】非接触検査システム110は、制動表面を指す非接触センサ(112−1、112−2)の1つ以上の対及びディスクの外径を指す非接触センサを有する。非接触センサは、誘導性センサ、容量性プローブ及び/又はレーザ・センサである。システムは、制動表面102、104厚さ変動、横振れ、平坦さ、平行性及び直径等の種々の特徴及び特性を測定する。ディスクが指定速度で回転する間に又はディスクが停止している間に測定を行う。非接触センサ(112−1、112−2)の対は、センサ又は校正された表面から、その指した表面までの距離を連続的に測定する。他の2つのセンサ(115及び/又は117)は、センサ又は校正された表面から、その指した面までの距離を連続的に測定する。
(もっと読む)
三次元測定機
【課題】被測定物の大きさに拘わらず、プローブの接触を確認しながら測定を実行することができる三次元測定機を提供する。
【解決手段】被測定物を載置するテーブルとプローブとを三次元方向へ相対移動させる相対移動機構13と、相対移動機構の駆動を指令する携帯可能な操作盤30と、操作盤からの指令に基づき相対移動機構を駆動させるとともに、プローブからの信号を取り込んで被測定物の形状を求める制御装置40とを備える。プローブの近傍にはカメラ20が取り付けられ、操作盤30には、表示部34と、カメラによって撮像された画像を表示部に表示する制御部38とが設けられている。
(もっと読む)
スタイラス及び接触式変位センサ
【課題】被検物の表面付近まで安全に接近させることができるスタイラスを提供する。
【解決手段】先端部12を被検物Sに接触させて被検物Sの表面を追従させることにより、被検物Sの表面形状を測定するためのスタイラス10は、先端部12の先端12Aよりも前方の所定位置Pを通るように光Lを照射する発光部13と、発光部13から照射された光Lが反射された反射光L1を検知する受光部14とを備えることを特徴とする。
(もっと読む)
重心測定システムおよび重心測定方法
【課題】被測定物の重心位置を正確に把握することができる重心測定システムおよび重心測定方法を提供する。
【解決手段】被測定物を載置する載置台、プローブ12およびこれらを三次元方向へ相対移動させる相対移動機構13を有し、被測定物の形状を測定する三次元測定機10と、載置台の重心位置を測定する重心測定装置20と、三次元測定機の座標系と重心測定装置の座標系とを一致させるとともに、三次元測定機によって測定された被測定物の形状データに、重心測定装置で測定された重心位置を合成するデータ処理装置30とを備える。
(もっと読む)
改良された関節式アーム
関節式アームCMMは、複数の伝達部材と、少なくとも2つの伝達部材を互いに接続する複数の関節部材と、遠端における座標取得部材と、近端におけるベースとを備える。関節部材の少なくとも2つは、少なくとも1つのエンコーダを備えることが可能であり、少なくとも2つのエンコーダは、ともに、単一のモノブロックハウジング内に収容されることが可能である。 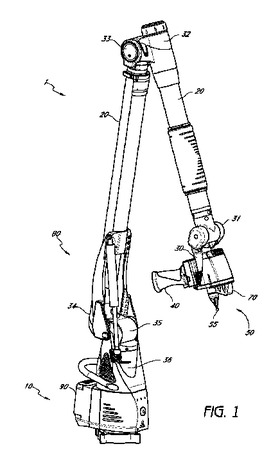 (もっと読む)
(もっと読む)
測定装置
【課題】微粒子の接触体を用いて、矩形溝形状を有するマイクロマシン等の三次元形状を高精度で測定する。
【解決手段】接触体6は、可撓性の支持部材5と透明な固定部材4によってプローブ本体9に連結される。対物レンズ3にてレーザ光Gを集光させ、接触体6の底面に焦点を合わせて光放射圧によって接触体6を被測定物13の表面に接触させる。レーザ光Gを音響光学偏向器2によって偏向させることで、接触体6を任意の方向に振動させることができる。被測定物13が矩形溝形状を有する三次元構造体であっても、接触体6の振動方向を調整することで高精度な形状測定を行うことができる。
(もっと読む)
関節角度計測装置
【課題】従来の関節角度計測装置は、ビデオカメラによって被験者を撮影するスペースや、画像解析を行うコンピュータ等が必要となるので、設備が大がかりなものとなり、製品コストが増大している。
【解決手段】本発明による関節角度計測装置は、例えば上腕及び前腕や腰及び上腿等の関節を挟む第1及び第2部位に第1及び第2慣性センサ1,2が取付けられ、信号処理器3の信号回路34がcos−1(X1・X2+Y1・Y2+Z1・Z2)の演算を行うことで関節の曲げ角度φを算出する構成である。
(もっと読む)
表面形状の測定方法
【課題】プローブを用いて、容易かつ高精度に被検物の表面形状を測定することができる表面形状の測定方法を提供する。
【解決手段】プローブと被検物とを相対移動させることにより、被検物の表面形状を測定する表面形状測定方法は、被検物の第1の領域の第1表面形状データを取得する第1取得工程と、第1表面形状データと少なくとも一部が重複する被検物の第2の領域の第2表面形状データを取得する第2取得工程と、第1表面形状データのうち、第2表面形状データと重複する領域のデータに対して、近似関数による当てはめを行って近似曲線を取得する近似曲線取得工程S20と、近似曲線を用いて第2表面形状データの補正量を算出する補正量算出工程S30と、算出された補正量に基づいて、第2表面形状データ全体を座標変換する座標変換工程S40と、第1表面形状データと、座標変換が行われた第2表面形状データとを統合する工程とを備える。
(もっと読む)
誤差伝播による出力データの精度評価方法
【課題】出力データの精度評価を、理論的で、簡単な計算で行え、計算量が少なく、収束計算を行う必要が無く、データ処理を行う多くのソフトウェアに適用可能であり、誤差の要因の分析、要因毎の大きさの比較等の多くの解析が可能となるようにする。
【解決手段】データ処理を入力データによって数値微分することで、データ処理のヤコビ行列Jを求める手順(ステップ110)と、入力データの持つ誤差の分散共分散を推定して、入力データの誤差行列Dを求める手順(ステップ120)と、前記ヤコビ行列J及び入力データの誤差行列Dより、出力データの持つ誤差の分散共分散を表す誤差行列Rを計算する手順(ステップ130)と、を含む。
(もっと読む)
自在曲面スキャナー
【課題】3次元曲面に対して簡易にかつ自在に曲面形状を型取りできる自在曲面スキャナーを提供する。
【解決手段】自在曲面スキャナー1は、その一面を3次元曲面に当てて曲面形状を型取りする板状定規部2と、板状定規部2に一定のピッチで取付けられる固定具3と、隣接する旋回板4との重複部10を有するように固定具3により板状定規部2の他面側に取付けられ、板面に明けられた長円孔5と、板面から突出するボルト6及びナット7とを有する旋回板4とを備え、旋回板4は、ボルト6が一方の側に隣接する旋回板4に明けられた長円孔5に差し込まれ、長円孔5が他方の側に隣接する旋回板4に取付けられたボルト6により差し込まれることで曲面形状を型取りする板状定規部2の動きに追従し、ナット7が締め込んで旋回板4の重複部10を相互に固定する。
(もっと読む)
機械の誤差同定方法およびプログラム
【課題】2つ以上の並進軸と1つ以上の回転軸を有する機械において、回転軸に関する幾何誤差と並進軸に関する幾何誤差とをほぼ同時に同定する。
【解決手段】回転軸であるC軸等を複数角度に割り出してターゲット球12を複数箇所に位置決めし、位置計測センサによりターゲット球12の3次元空間上の中心位置を計測し、計測された複数の中心位置計測値を円弧近似し、近似された円弧の1次もしくは2次成分等からC軸等の中心位置の誤差および傾き誤差並びに並進軸であるX軸,Y軸等の傾き誤差を算出する。
(もっと読む)
形状測定装置
【課題】凹状のゲージを用いた形状測定装置の校正の精度の低下を防止する。
【解決手段】形状測定装置のステージの上面に設けられているゲージは、形状測定装置の校正に用いる凹球面状の凹部と、凹部の底から垂直に突出するように設けられている送風部材52により構成される。送風部材52の送風部52Aの下面には、下面の外周に沿って、送風口61−1乃至61−nが所定の間隔で配置されている。形状測定装置の電源が投入されている間、常にこの送風口61−1乃至61−nから凹部の表面に向かって風が吹き出され、凹部の表面の埃などの異物が吹き飛ばされる。本発明は、例えば、被検物の3次元形状を測定する形状測定装置に適用できる。
(もっと読む)
手動式三次元測定装置、手動式三次元測定方法、及び手動式三次元測定用プログラム
【課題】手動式三次元測定の操作性及び正確性を向上させる。
【解決手段】手動式三次元測定装置は、被測定物2を測定する測定プローブ21と、測定プローブ21を三次元座標測定空間内において作業者が手動操作で移動させることができるように移動自在に支持する移動機構11〜13と、測定プローブ21の三次元座標空間内における位置情報を出力する位置情報出力部と、被測定物2の測定点情報を含むCAD情報を入力しこのCAD情報と測定プローブ21の位置情報とに基づいて測定プローブ21と測定点3との位置関係を逐次演算する位置演算部51と、位置演算部51の演算結果に基づいて測定プローブ21を測定点3で停止させるように移動機構11〜13による測定プローブ21の移動を規制する停止制御部53とを備える。
(もっと読む)
関節プローブヘッド
【課題】関節プローブヘッドの回転軸をロックするためのブレーキを提供する。
【解決手段】支持体に取り付くための第1のマウントと、表面検出装置が取り付け可能な第2のマウントとを備え、第2のマウントが第1のマウントに対し一以上の軸回りに回転可能である関節プローブヘッドにおいて、第1のマウントに対する第2のマウントの一以上の軸回りの位置をロックするための少なくとも一以上の機械式ブレーキが設けられ、これにより、少なくとも一つの位置測定装置が、ロック位置において、第1のマウントに対する第2のマウントの一以上の軸回りの位置を決定すべく設けられる。
(もっと読む)
101 - 120 / 584
[ Back to top ]