
Fターム[2F129BB33]の内容
航行(Navigation) (246,646) | 測位技術 (39,762) | 測位補正 (8,659) | 補正対象 (3,438) | 位置 (2,582)
Fターム[2F129BB33]に分類される特許
141 - 160 / 2,582
カーナビゲーション装置、カーナビゲーションシステムおよびプログラム
【課題】ドライバの訪問等が望ましくない有害地にドライバが訪問等することを抑制する。
【解決手段】有害地接近抑止機能が解除されない場合には、自車位置の周辺のリンクやノードの情報、POIデータに付加された有害地情報が検出されると、自車位置と、自車位置の周辺の地図と、検出された有害地情報の内容に応じた注意喚起を行う表示とを重畳的にディスプレイ117に表示する処理を行うように構成した。これにより、たとえば、車両のドライバが未成年者である場合、未成年者の訪問等が望ましくない有害地に未成年者が訪問等することを抑制できる。
(もっと読む)
ナビゲーション装置

【課題】地図画面とメニュー画面の利便性に優れたナビゲーション装置を得る。
【解決手段】この発明に係るナビゲーション装置は、表示制御部が、操作入力部からの操作情報によりメニュー画面を表示するとき、経路探索部または自車位置特定部から得られる移動体の走行状態の情報を用いて地図画面またはメニュー画面の表示形態を決定し、表示部がメニュー画面を地図画面上に表示する際に、移動体の走行状態の情報として、移動体の移動速度を用いて地図画面の表示面積は変更せずにメニュー画面の表示面積を変更するものである。
(もっと読む)
マルチセンサ判定装置及びプログラム
【課題】所定時間内に観測された観測値の大半を外れ値が占める場合であっても、適切に外れ値を判定する。
【解決手段】状態推定部20で、マルチセンサ12で観測された観測値D(各観測値d)から推定値xを推定し、事前分布算出部26で、観測値Dから推定される推定値xの事前確率分布p(x)を算出し、事後分布算出部28で、観測プール24に記憶された観測値Dを用いて、観測値Dの尤度p(D|x)、及び推定値の事前確率分布p(x)に基づいて、推定値の事後確率分布p(x|D)を算出する。観測値分布算出部30で、推定値の事後確率分布p(x|D)と各観測値の尤度p(d|x)とに基づいて、各観測値の確率分布p(d)を算出し、外れ値判定部32で、新たに観測された観測値Dの各観測値dと、各観測値の確率分布p(d)の各々とを観測値の次元毎に比較して、外れ値を判定し、外れ値ではないと判定された観測値を観測プール24へ記憶する。
(もっと読む)
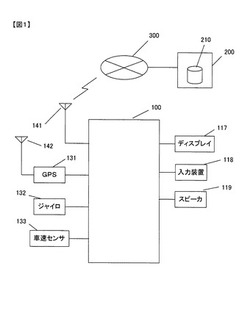
ナビゲーション装置、ナビゲーションシステム、端末装置、ナビゲーションサーバ、ナビゲーション方法、およびプログラム
【課題】利用者の進行方向の誤りを適切に検出することができるナビゲーション装置、ナビゲーションシステム、端末装置、ナビゲーションサーバ、ナビゲーション方法、および、プログラムを提供することを課題とする。
【解決手段】本発明において、端末装置100は、ナビゲーションサーバ200から案内経路を取得し、現在位置を取得し、取得された現在位置が取得された案内経路上の所定地点に到達したかを検出し、当該到達が検出された場合には、当該到達が検出された時からの経過時間、または当該到達が検出された時以降に新たな現在位置が取得された取得回数を計測し、計測されている経過時間が所定時間内である、または計測されている取得回数が所定回数以内である場合には、閾値を低減し、取得された案内経路に含まれる経路のうち、取得された現在位置との距離が当該閾値以下となる経路上に、当該現在位置を補正する。
(もっと読む)
モバイルロケータ
【課題】本発明は、自律航法において、モバイルロケータが経時変化した後にも、車両位置の計測結果についての補正データを修正するとともに、GPS測位において、車両位置の計測結果の誤差を小さくすることを目的とする。
【解決手段】本発明は、自律航法及び補正データを利用して算出した2地点間の移動距離を、その2地点の絶対位置に基づくその2地点間の移動距離と比較し、これらの移動距離の相違に応じて、補正データを修正する。そして、GPS測位を利用して算出したある地点の位置を、その地点の絶対位置に基づいて補正する。
(もっと読む)
ナビゲーションシステム
【課題】ナビゲーションシステムにおいて、GPS電波が利用できないときでも、誤差の少ない経路案内ができるようにする。
【解決手段】本ナビゲーションシステムは、案内経路上におけるユーザの推定位置を算出する位置推定手段212aと、モード切替手段214を有する。位置推定手段212aは、前記推定位置を、GPSを利用するGPSモードと、歩数計と地磁気センサの出力に基づき前記推定位置を算出する自律航法モードと、前記歩数計のみに基づき前記推定位置を算出する歩数計モード、のいずれかのモードで算出する。前記モード切替手段214は、GPSが利用できるときは常にGPSモードに、GPSが利用できないときは前記自律航法モードに切り替え、但し、地磁気センサの動作に異常があれば更に前記歩数計モードに切り替える。
(もっと読む)
ナビゲーションデバイスの位置を決定すること
【課題】ナビゲーションデバイスの位置を決定するための方法を提供すること。
【解決手段】ナビゲーションデバイスは、複数の異なる位置決定手順に基づいてナビゲーションデバイスの位置を決定するように適合される。各位置決定手順は、所定のパラメータセットと共に作用する。複数の地理的エリアが提供され、各地理的エリアは、位置決定手順のうちの1つに関連付けられる。ナビゲーションデバイスの近似的位置が決定され、この近似的位置に基づいて、ナビゲーションデバイスが位置している地理的エリアが決定される。決定された地理的エリアに基づいて、複数の位置決定手順のうちの1つが選択され、選択された位置決定手順に基づいて、ナビゲーションデバイスの位置が決定される。
(もっと読む)
ADS−B送信の受信からの状態ベクトル、タイミングおよびナビゲーション品質値の決定
【課題】空中、海上または地上ベースのプラットフォームにおけるモバイルデバイスの位置決定方法の提供。
【解決手段】モバイルデバイスにおいて複数のメッセージを複数のモバイル基準デバイスから受信することであって、各メッセージは、基準時間に対して既知のタイミングを有している複数のMSO時刻のうちの1つで始まり、各メッセージを送信するモバイル基準デバイスに対する位置情報と、各メッセージの送信が開始されるMSO時刻を示すMSO値とを含むことと、モバイルデバイスにおいて受信される各メッセージの受信の時間を決定することと、モバイルデバイスにおいて受信される各メッセージの送信の時間を決定するためにMSO値を用いることと、各メッセージの送信の時間および受信の時間と、モバイル基準デバイスに対する位置情報とに基づいてモバイルデバイスの位置を多辺測量により決定することとを含む、モバイルデバイスの位置を決定する方法。
(もっと読む)
カーナビゲーション装置
【課題】同じ目的地まで走行する頻度が高い場合のユーザにとっての目的地設定の煩わしさを解消し、しかもユーザにとってより良いルートを見つけていくことを可能とする。
【解決手段】制御装置2は、自車両の走行時において走行軌跡及び速度関連情報を含む走行データを収集し、記憶装置6に走行履歴データとして蓄積記憶する。制御装置2は、車両の現在位置P(出発地S)及び走行方向を検出し、記憶装置6に記憶されている走行履歴データに存在する所定の目的地Gに向っているかどうかを推定する。目的地Gに向っていると推定されたときに、記憶装置6の走行履歴データに基づいて当該目的地Gまでの推奨するルートを求め、表示装置7の画面表示により提示する。更に、推奨するルートとは異なる別ルートを求め、表示装置7の画面表示によりその別ルートも提示する。
(もっと読む)
走行情報演算装置、ナビゲーションシステムおよび走行情報演算方法
【課題】車両から収集される走行情報をより有効に活用する。
【解決手段】走行情報演算装置100は、自動車の測定位置と測定時刻とを含む走行情報を当該自動車に搭載された車載器からネットワーク20を介して取得する走行情報取得部102と、一方の側から交差点間リンクに進入した自動車の走行情報を特定する走行情報特定部110と、特定された走行情報から、自動車が交差点間リンクに進入した後次に停止した交差点間リンクを特定する走行距離演算部112と、特定された交差点間リンクが自動車が進入した交差点間リンクから最も遠い自動車を特定し、特定された自動車のNS速度を推奨NS速度として採用する推奨自動車特定部118と、推奨NS速度に基づいて運転支援情報を生成する支援情報生成部106と、を備える。
(もっと読む)
分岐点図表示システム、端末装置、配信サーバ、分岐点図表示方法、分岐点図表示プログラム
【課題】分岐点を示す分岐点図を表示するために配信するデータのサイズを小さくし、しかも、データの配信動作を効率良く行う。
【解決手段】ナビゲーションシステム10において、配信サーバ12は、ナビゲーション装置11が特定した複数の分岐点について、これら分岐点の手前において配信すべき分岐点パーツである配信パーツを定めた配信スケジュールを作成し、そのスケジュールに従って配信パーツを配信した場合の配信負荷を演算し、配信負荷に応じて配信スケジュールを変更し、配信スケジュールに従って、配信パーツを分岐路パーツ保有部43から取得してナビゲーション装置11へ配信する。ナビゲーション装置11は、配信サーバ12が配信した分岐点パーツに基づいて、複数の分岐点それぞれに対応する分岐点図を作成して表示する。
(もっと読む)
データ配信システム、データ配信サーバ及びデータ配信方法
【課題】データのメンテナンスコストを抑えながら、車両の位置推定精度を向上させる。
【解決手段】データ配信サーバと、各々が移動体に搭載され、ネットワークを介して前記データ配信サーバに接続される複数の端末と、を備えるデータ配信システムであって、前記各端末は、位置センサ及び環境センサを備え、前記位置センサによって取得された前記移動体の位置を示す位置データ及び当該位置において前記環境センサによって取得された前記移動体の周囲の環境情報を含む環境センシングデータを前記データ配信サーバに送信し、前記データ配信サーバは、前記複数の端末から送信された環境センシングデータを保持し、前記位置データに基づいて、典型的な前記環境センシングデータを選択し、前記選択された典型的な環境センシングデータを前記端末に送信する。
(もっと読む)
走行情報演算装置および走行情報演算方法
【課題】GPSの精度が低くても信号機のサイクルを推測できるようにする。
【解決手段】走行情報演算装置100は、自動車の測定された位置と測定時刻とを含む走行情報を当該自動車に搭載された車載器からネットワーク20を介して取得する走行情報取得部102と、走行情報取得部102によって取得された走行情報をもとに、自動車が所定の位置範囲内にとどまっている期間を特定する停止検出部104と、停止検出部104によって特定された期間に対応する位置範囲と既知の信号機の位置とが対応するか否かを判定し、対応すると判定された場合、停止検出部104によって特定された期間を当該信号機に対応する期間として取得する信号前停止期間取得部106と、所定の信号機について信号前停止期間取得部106によって取得される複数の期間を組み合わせることによって、その信号機が赤信号となっている期間を演算するサイクル演算部142と、を備える。
(もっと読む)
ナビゲーション装置
【課題】推奨経路上の基準地点からユーザの歩数及び所定の歩幅を基に測定した歩行距離を推奨経路上の移動距離とし、推奨経路上のユーザの位置を推定するナビゲーション装置において、エスカレータや動く歩道やエレベータを通過することで発生する推定位置と実際の位置との間のずれを補正する。
【解決手段】ナビゲーション装置は、探索した推奨経路の経路案内を行う際、推奨経路上の基準地点からユーザの歩数及び所定の歩幅を基に測定した歩行距離を推奨経路上の移動距離とし、推奨経路上のユーザの位置を推定する。推奨経路上の推定位置がエスカレータ又は動く歩道又はエレベータに到達し(S41:Yes)、歩数計のカウントが一定時間停止したとき(S42:Yes)、推定位置をエスカレータ又は動く歩道又はエレベータの終点に設定する。
(もっと読む)
移動案内表示システム、移動案内表示方法及びコンピュータプログラム
【課題】遮蔽空間の空間形状を表示装置に表示された画像上でユーザに正確に把握させることを可能とした移動案内表示システム、移動案内表示方法及びコンピュータプログラムを提供する。
【解決手段】車両が遮蔽部材によって遮蔽された遮蔽空間を走行し、且つ該遮蔽空間が3D走行画面の表示対象となっている場合には、車両が現在走行する遮蔽空間を遮蔽空間内部からの視点で3DCG画像により表示した3D走行画面60、61を液晶ディスプレイ15に表示する。また、3D走行画面60、61では、遮蔽空間の形状を特定する形状特定物(例えば、ライト68、縁石69、区画線75、縁石76)を、遮蔽部材に重畳して表示するように構成する。
(もっと読む)
運転支援装置および運転支援方法
【課題】マッチング状態ではない場合にも運転支援を開始可能にする技術の提供。
【解決手段】車両が存在する道路区間に相当するリンクであるマッチングリンクを特定するマップマッチング処理において所定の基準以上の信頼度で前記マッチングリンクが特定されたマッチング状態であるか否かを判定し、前記車両の現在位置を検出し、前記マッチング状態ではない場合に、前記現在位置に最も近い道路区間に相当するリンクを候補リンクとして特定する候補リンクを特定し、判定対象となる対象ノードに複数のリンクが接続されているとともに、前記候補リンクが前記複数のリンクのうちの一つのリンクから他のリンクに変化した場合に、前記対象ノードが示す位置を前記車両が通過したと判定し、前記対象ノードが示す位置を前記車両が通過したと判定された場合に、前記対象ノードが示す位置を前記車両が通過した後の運転支援として予め決められた運転支援を実行する。
(もっと読む)
位置算出方法及び位置算出装置
【課題】移動体に備えられた衛星測位用ユニット及び慣性測位用ユニットの計測結果を併用した位置算出手法の提案。
【解決手段】GPSユニット3とINSユニット5とを備えた位置算出装置1において、影響度合設定部7は、位置算出を開始してから所与の条件が成立するまでの間は、GPS計測結果のINS計測結果に対する影響度合を第1の度合に設定し、所与の条件が成立した後は、影響度合を第1の度合よりも低い第2の度合に設定する。そして、カップリング処理部9は、影響度合設定部7により設定された影響度合に基づいてGPS計測結果とINS計測結果とのカップリング処理を実行して、移動体の位置を算出する。
(もっと読む)
位置処理装置、位置処理方法及び位置処理用プログラム
【課題】駐車場の出口及び入口をそれぞれ示す位置データが用意されていない場合であっても、より正確に出口又は入口それぞれの位置を特定することが可能な位置処理装置を提供する。
【解決手段】道路と、当該道路に接する道路外施設と、を接続する接続路の通過に伴う通過操作が行われたか否かを検出するウインカ検出部等の操作検出手段と、前記通過操作が行われた位置を検出するセンサ部等の位置検出手段と、前記検出された位置を、前記接続路の位置として決定する処理部等の決定手段と、を備え、道路外施設である駐車場Pから道路Rに出るための出口OUTの通過に伴うウインカの操作が行われた位置Poutを、出口OUTとして決定する。
(もっと読む)
ナビゲーション装置
【課題】推奨経路上の基準地点からユーザの歩数及び所定の歩幅を基に測定した歩行距離を推奨経路上の移動距離とし、推奨経路上のユーザの位置を推定するナビゲーション装置において、推奨経路上の施設を通過することにより発生する歩行距離と実際の移動距離との間のずれを補正する。
【解決手段】ナビゲーション装置は、探索した推奨経路の経路案内を行う際、推奨経路上の基準地点からユーザの歩数及び所定の歩幅を基に測定した歩行距離を推奨経路上の移動距離とし、推奨経路上のユーザの位置を推定する。推奨経路上の推定位置が階段に到達したとき(S41:Yes)、「階段の段数×80cm−階段の長さ」を基準地点からの移動距離から減算し(S42)、推定現在位置を更新する(S43)。
(もっと読む)
車両および車両制御プログラム
【課題】自車両の走行を自動で制御しつつ、搭乗者の意思に沿って走行経路を決定できる車両および車両制御プログラムを提供すること。
【解決手段】車両1が、予め設定された走行軌道に沿って自動走行を行っている場合に、搭乗者がジョイスティック13を傾斜操作すると、走行制御装置100は、その傾斜方向(操作角度δ)に基づいて進行すべき道路を選択し、その道路へ進入するための走行軌道を走行軌道メモリ93bに格納する。これにより、搭乗者の意思に基づいて指示された車両1の進行すべき方向に基づいて走行軌道が設定され、その走行軌道に沿って車両1の走行を制御できる。よって、自車両の走行を自動で制御しつつ、搭乗者の意思に沿って走行軌道を決定できる。
(もっと読む)
141 - 160 / 2,582
[ Back to top ]