
Fターム[2G051AA82]の内容
光学的手段による材料の調査の特殊な応用 (70,229) | 調査・分析対象 (8,670) | 管の内面 (180)
Fターム[2G051AA82]に分類される特許
1 - 20 / 180
検査対象物表面の傷検出装置及び傷検出方法
加工物内の中空空間の内面を撮影する装置
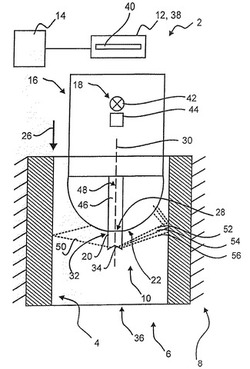
【課題】 本発明は、加工物(8)内の中空空間(6)の内面(4)を撮影する装置(2)に関する。
【解決手段】 本装置(2)は、画像撮影機(12)及びその後に配置された評価機器(14)と画像を伝送できるように接続された全視界方式の光学系(10)を備えている。更に、本装置(2)は、光学系(10)によって検出される内面(4)の撮影範囲を照明する光源(18)を備えた照明機器(16)を有する。本発明では、照明機器(16)の発光部材と偏光部材の一方又は両方(20,20’)が少なくとも一つ光学系(10)のレンズ(22)、特に、視野レンズ(22)に配置されている。
(もっと読む)
円筒形状物の外観検査装置

【課題】 汚れに強く、段取りやメンテナンスを容易化すると共に、コスト低減を図ることができる円筒形状物の外観検査装置を提供する。
【解決手段】 この外観検査装置は、円筒形状物である被検査物の外観を検査するものである。外観検査装置は、回転自在に設置され回転中心軸L1と同心に配置した軸受1の端面を接触させる端面治具5と、端面治具5の軸受1を接触させる側面に回転中心軸L1と同心に設けられた円錐面状の照明反射部6と、外輪3を回転させる駆動装置18と、外輪押えローラー19と、内輪押えローラー20と、照明反射部6に照射する照明装置8と、この照明装置8で照射され照明反射部6および内輪2の内周面2aで順次反射された反射光により内輪2の内周面2aを撮像する撮像装置11とを備えた。
(もっと読む)
管端検査装置
【課題】管端部の加工部について、寸法精度と加工面の状態とを共に自動的に検査することができ、しかもインライン化が可能なよう検査装置全体のコンパクト化を可能にした、管端検査装置を提供する。
【解決手段】端部を加工した管2の管端加工部を検査する管端検査装置である。管端加工部の形状を計測するレーザ変位計42と、管端加工部の表面を撮影する撮像装置62と、レーザ変位計42及び撮像装置62を管端加工部の周方向に沿って移動させることにより、レーザ変位計42のレーザビームスポット及び撮像装置62の焦点を管端加工部の周方向に沿って周回させる回転テーブル(周回手段)と、を備える。
(もっと読む)
穴検査方法及び装置
【課題】細穴であっても、穴壁面の付着物を容易に除去することが可能な穴検査方法及び装置を提供する。
【解決手段】先端に広角レンズ15を備えた挿入シャフト11を穴へ挿入させて、広角レンズ15を通じた画像に基づいて穴壁面を検査する際、挿入シャフト11の外周面に沿って穴の奥に向ってガス噴出機構19によりガスを噴出させる。ガス噴出機構19は、挿入シャフト11の先端側の部分を囲繞し、その内周面と挿入シャフト11の外周面との間に挿入シャフト11の長手方向に延びるガス噴出路Rを形成するガイド13と、ガイド13の内部空間にガスを供給するガス供給部14とから構成される。
(もっと読む)
画像処理方法
【課題】予め基準となる画像データを保持する必要がなく且つ簡易に、光軸と穴の中心軸との位置ずれを補正して、パノラマ展開画像に変換することが可能な画像処理方法を提供する。
【解決手段】環状画像から内円及び外円を抽出する工程と、抽出した内円及び外円の中心をそれぞれ求める工程と、極座標変換する際に基準となる展開中心を、内円中心と外円中心との間で順次移動させながらパノラマ展開画像に変換する工程とを備える。これにより、全方位撮像装置10により穴Hの側壁面を撮像した環状画像をパノラマ展開画像に極座標変換する際に、全方位撮像装置10の光軸L1と穴Hの中心軸L2との位置ずれに起因する歪みを補正することができる。
(もっと読む)
エンジンボア表面傷の評価方法
【課題】スカッフィングを精度よく検出できるとともに、スカッフィングの大きさを定量的に評価できるエンジンボア表面傷の評価方法を提供する。
【解決手段】解析画像データ41を取得して、第一周波数スペクトル42を求める工程S10・S20と、フィルタリングした第一周波数スペクトル42を復元し、二次元凹凸データ45を生成するステップS30〜S50と、二次元凹凸データ45から第二周波数スペクトル46を求めるとともに、スカッフィングW3を検出するステップS60・S70と、二次元凹凸データ45から第三周波数スペクトル47を求めるとともに、フィルタリングした第二周波数スペクトル46を復元するステップS80〜S110と、復元した二次元凹凸データ49よりスカッフィングW3を評価するステップS120〜S150とを行う。
(もっと読む)
抜け止め機構
【課題】管体に挿し込んだ筒体の抜け止めを作業効率を損なうことなく、簡便な構成で行うこと。
【解決手段】筒体2に固定される鍔部材10と、筒体止水部5に固定される係止部材11で抜け止め機構1を構成する。鍔部材10は、二つに分割した分割リング12、12を締め付けボルト13で締め付けることによって前記固定がなされる。また、係止部材11は、筒体止水部5に固定するベース部17と、このベース部17に対して開閉自在に設けられたアーム部14と、このアーム部14を閉じた状態でロックする固定具18とから構成される。筒体2の挿し込みの際にはアーム部14を開いた状態とし、この挿し込みが完了したらこのアーム部14を閉じる。このようにすれば、鍔部材10と、係止部材11のアーム部14とが当接して、筒体2の抜け止めを図ることができる。
(もっと読む)
クリープ損傷を受ける金属の余寿命診断装置
【課題】クリープ損傷を受ける金属の余寿命をDパラメータ法で診断するに際し、余寿命診断処理を容易化する。
【解決手段】
診断用コンピュータ3に、金属表面における複数の粒界に対応する粒界画像データを取得させ(S3)、粒界画像データから、各粒界の始点座標と終点座標を含む粒界データを取得させ(S4)、配管の応力方向に垂直な参照方向を示す参照方向データを、粒界画像データに設定させ(S5)、参照方向データに基づいて、複数の粒界データの中から、参照方向を中心とする所定の角度範囲に属する垂直粒界データを抽出させ(S5)、垂直粒界データに対応する粒界上のボイド形成状態に基づいて、当該垂直粒界データが損傷粒界に対応する損傷粒界データか否かを判断させ(S6)、垂直粒界データに対応する粒界の数、及び、損傷粒界データに対応する粒界の数に基づき、Dパラメータ法を用いて金属の余寿命を診断させる(S8)。
(もっと読む)
管路内検査装置
【課題】走行車が管路内に堆積した汚泥、粘土、スラリ、砂、瓦礫などの異物に埋まったり、異物を噛み込んだりせず、水中の藻や草などに絡まることなく安定走行でき、機動性、走行安定性、汎用性に優れ、簡単な操作で短時間の内に効率的に管路内の検査を行うことができ、操作性、取扱い性に優れ、不具合発生箇所を簡便かつ確実に記録できる検査作業の信頼性、効率性に優れた管路内検査装置の提供。
【解決手段】走行車が、車両本体の両側部にそれぞれ複数ずつ配設される車輪部を備えた走行部と、車両本体の上部にレンズが配設されたカメラと、車両本体に配設された照明部と、を有し、走行部が、各々の車輪部の両側部の少なくともいずれか一方の外側方向又は各々の車輪部の外周方向に突出する複数の突起部を有する推進補助部を備える。
(もっと読む)
配管クリーニング方法及び配管検査方法
【課題】十分に配管内壁を覆い、信頼性の高い保護が可能な配管クリーニング方法及び配管検査方法を提供する。
【解決手段】本発明の一観点に係る配管のクリーニング方法は、配管内壁に付着した堆積物を除去する工程、配管内壁に第一の樹脂層を形成する工程、第一の樹脂層上に、第一の樹脂とは色の異なる第二の樹脂層を形成する工程、を有する。
また本発明の他の一観点に係る配管検査方法は、配管内壁に付着した堆積物を除去する工程、配管内壁に第一の樹脂層を形成する工程、第一の樹脂層上に、第一の樹脂層とは色の異なる第二の樹脂層を形成する工程、第二の樹脂層表面の色を測定する工程、を有する。
(もっと読む)
管内検査装置
【課題】埋設管の隙間に挿入されたカメラヘッドの押し込み方向への進行ガイドをスムーズに行うことができ、長距離押し込み型ハードケーブル(押し込みケーブル)の押し込み操作による管内検査を円滑に効率よく実施できる。
【解決手段】カメラヘッド14の径方向に対して湾曲した形状をなし、その外周面が円弧状の凸面に形成されたスキッド51をカメラヘッド14に取着して、電纜管入線済み管路となる埋設管5の内部を調査する。
(もっと読む)
自走式管内検査カメラ装置および管径変換ユニット
【課題】2倍強の管径差をもつ広範な管径(350mm〜800mm)を対象に、検査対象となる配管内を円滑にかつ適正な速度で走行して、管内を斑なく的確に観察できる自走式管内検査カメラ装置を提供する。
【解決手段】走行ユニットを構成する管径変換ユニット1と管径変換ユニット1に選択的に結合される管径変換アダプタ用取付アダプタ13および第1乃至第3の管径変換アダプタ(CA1)〜(CA3)とにより複数種の管径に対応した自走式管内検査カメラ装置の管径変換ユニットを構成している。
(もっと読む)
放射状照明と曲面鏡を有する検査装置。
【課題】被検査体の内面の全周を、所定の角度から見た画像を一度に撮像する放射状照明、曲面鏡およびCCDカメラを有する検査装置を提供する。
【解決手段】
保持台に保持された被検査体の内面の全周を、被検査体の内面を放射状に光が照射されるように環状に配置された複数のLED(4)、前記LED(4)と同じ中心をもつ曲面鏡及び前記曲面鏡と同じ中心をもち、上方向に光が照射されるように環状に配置された複数のLED(7)およびCCDカメラにより曲面鏡に写った像を撮像する。曲面鏡の位置を上下に移動させることにより、被検査体の内面を所定の角度から見た画像として撮像する。
(もっと読む)
管内面検査装置およびその検査方法
【課題】管内面の状態や寸法によらずに管内面を検査することができる管内面検査装置およびその検査方法を提供する。
【解決手段】本発明の実施形態は、管2内面の検査箇所にパターンを有するパターン光P1を管2内面の周方向にわたって投影する投影手段11と、検査箇所に投影され反射されたパターン光を反射パターン光P2として投影する表示手段12と、反射パターン光P2の形状を観測する観測手段13とを備える。
(もっと読む)
管内面検査方法、及び管内面検査装置
【課題】管内面のきずの検出精度が高く、かつ、手間とコストがかからない管内面検査方法、及び管内検査装置を提供する。
【解決手段】環状照明3を鋼管2の端面21に対向させて環状照明3の中心軸32と鋼管2の管軸22とを略一致させ、照明光を鋼管2の内面23に向けて出射し、かつ、カメラ4を鋼管2の端面21に対向させてカメラ4の光軸と鋼管2の管軸22とを略一致させ、端面21及び内面23を撮像する。撮像した画像から、内面画像を抽出し、内面画像を径方向に複数の環状領域に分割する。分割した環状領域毎に濃度の基準範囲を設け、濃度が該基準範囲から外れた画素群をきず候補画素群として抽出する。きず候補画素群を含む所定の画素領域の画素の濃度から環状領域毎に定めた所定の濃度を減算し、濃度を減算された画素領域を管内面の径方向から見た場合の画素領域に変換し、変換した画素領域からきずの有無を判別する。
(もっと読む)
孔内周面撮影装置
【課題】 孔内に挿入される導光棒に照明と受光とを行なわせて光学系を一つとし、構造を簡素化して部品数を低減するとともに、部品精度の要求を抑えて組立を簡単にして製造コストを低減した安価な孔内周面撮影装置を目的とするものである。
【解決手段】 光源光を拡散光として導光棒5の基端面に入射させる反射鏡7bを導光棒5の基方部周縁に設け、また、導光棒5が先端を受光と照明とを行なう円錐状面6とし、基端面を受光像投影面と光源入射面とされ、該導光棒5の基端面に入射された拡散光を全反射させて先端の円錐状面6に伝達して孔内周面を拡散光により照明するとともに、拡散光により照明された孔内周面からの反射像を前記円錐状面6により受光したうえ、導光棒5の基端面に全反射投影された受光像を撮影する撮影装置4が導光棒5の基端に設けられるものである。
(もっと読む)
レーザ投光装置、内部観察装置および内部観察方法
【課題】内部空間形成体内側の観察対象部にレーザ光を結像させつつ、レーザ光の結像サイズを調節可能であるとともに、レーザ投光装置を狭隘な点検穴から内部空間形成体内へ挿入できるようにする。
【解決手段】内部空間形成体3内へレーザ光を投光するレーザ投光装置20は、バリフォーカル光学系7を有する。バリフォーカル光学系7は、複数のレンズ体11a,11b,11cを有する。各レンズ体は、レンズ12と、該レンズを保持するとともに光軸方向に移動可能な保持移動片13a,13b,13cと、を有する。アクチュエータ19a,19b,19cが、ぞれぞれ、光軸方向に保持移動片を駆動することにより、内部空間形成体3内側でのレーザ光の結像位置と結像サイズを調節する。各保持移動片において対応するアクチュエータから駆動力を受ける駆動力伝達部分13a1,13b1,13c1は、周方向において互いにずれており、各アクチュエータは、光軸方向から見て、対応する駆動力伝達部分に重なる。
(もっと読む)
管路内進行装置
【課題】遠隔操作を必要とせず、しかも細い管路内でも種々の検査を行うことができ、応答が速く、かつ、人手を要することのない完全な自走式の管路内進行装置を提供する。
【解決手段】複数のユニット1〜9が揺動可能に連結手段10により連結され、複数のユニットは、壁面の状態を検出する探査ユニット1と、管路の内壁と係合したり、解除したりする支持ユニット2と、自動停止センサ3と、支持ユニット2のアームを制御するロックユニット4と、自動停止センサ3に接続される第1のガイドドライバユニット5aと、曲管センサ(検出ユニット)6と、検出ユニット6に接続される第2のガイドドライバユニット5bと、各ユニットを前進または後進させる駆動ユニット7と、コントローラユニット8と、コントローラユニット8およびガイドドライバユニット5a、5bを経由して各ユニットに電源を供給するバッテリーユニット9を有している。
(もっと読む)
鋳物穴加工品の鏡面球体残留検査装置および方法
【課題】検査員の主観に依らずして客観的な基準により鏡面球体のショット玉を検出し、安定した検査精度を実現でき、検査の自動化によりインラインで全数検査を実施できる鋳物穴加工品の鏡面球体残留検査装置および方法を提供する。
【解決手段】鋳物穴加工品11の加工穴12の内部を照らす照明部と、加工穴内を撮像可能なCCDカメラ21と、ボアスコープ22を撮像対象加工穴12に挿入するXYステージ30と、CCDカメラ21で撮像した画像を画像処理する画像処理装置52を備え、画像処理装置52は、撮像した取得画像において、ハイライト領域を有し、かつハイライト領域を囲む周辺部位にハイライト領域よりも輝度値の低い環状の暗領域を有する画像領域を、鏡面球体像の候補領域として選択し、候補領域におけるハイライト領域の輝度値が上位閾値より高く、かつ暗領域の輝度値が下位閾値より低い場合に候補領域が真の鏡面球体像であると判断する。
(もっと読む)
1 - 20 / 180
[ Back to top ]