
Fターム[3E054GC03]の内容
包装位置への供給−物品の供給 (7,769) | 検知、制御(制御) (316) | 位置、距離制御 (38)
Fターム[3E054GC03]に分類される特許
1 - 20 / 38
円柱体の回転位置決め装置
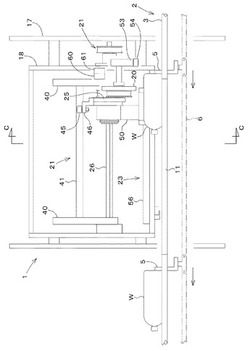
【課題】横倒させた円柱体Wを移動及び回転させながら、円柱体Wの回転位置決めを行うに際して、摩耗粉の発生を防止し、摩耗粉を原因としていた各種不具合を防止する。
【解決手段】レール部材3上の円柱体Wに当接する回転ローラ20と、回転ローラ20を回転駆動するローラ回転機構21と、回転ローラ20をレール部材3上の円柱体Wに接離させるローラ接離機構22と、回転ローラ20を送り爪5に同調させつつレール部材3に沿って移動させるローラ移動機構23とを有し、ローラ移動機構23には、回転ローラ20が円柱体Wに当接するよりも先に円柱体Wの一端部に当接して円柱体Wを送り爪5よりも搬送方向の下流側へ離反させる先行送り爪53が設けられており、この先行送り爪53には、回転ローラ20で回転される円柱体Wから転動力を受けて従動回転するロータ54が設けられている。
(もっと読む)
選果システム

【課題】移送装置による載置台からトレイへの青果物の移送能率の低下を極力抑制するとともに、載置台からトレイへ青果物を移送する際に移送装置の吸着部に吸着された青果物が当該吸着部から落下することを抑制することができる選果システムを提供することを課題とする。
【解決手段】載置台搬送装置51によって搬送される載置台5に載置される青果物6を吸着部66で吸着してトレイ8へ移送する移送装置60を備え、載置台5に載置される青果物6をトレイに詰める、選果システム1であって、移送装置60は、青果物6を吸着した状態で吸着部66が上方へ移動するときの平均速度、または、青果物6を吸着した状態で吸着部66が下方へ移動するときの平均速度が、青果物6を吸着した状態で吸着部66が水平方向へ移動するときの平均速度に比べて遅い速度となるように構成される。
(もっと読む)
搬送装置、カートニングマシン及び対象物入りカートンの製造方法
【課題】対象物の向きを調節可能な搬送装置、カートニングマシン及び対象物入りカートンの製造方法を提供する。
【解決手段】搬送装置20は、円筒状の対象物Rを軸線Rxまわりに回転可能に支持しながら搬送する対象物コンベア21と、対象物コンベア21に搬送されている対象物Rを軸線Rxまわりに回転させる回転手段25と、回転手段25による対象物Rの軸線Rxまわりの回転量を制御する制御装置60とを備える。カートニングマシンは、搬送装置20と、対象物Rを収容するカートンを搬送するカートンコンベアと、対象物Rの表面の基準位置が所定の方向を向くように調節された対象物コンベア21上の対象物Rを、カートンコンベア上のカートンに挿入する挿入装置とを備える。
(もっと読む)
果実保持装置
【課題】イチゴを吸着保持する際のイチゴの損傷を抑制する。
【解決手段】制御部が、吸着前画像取得部により取得されたイチゴの画像から、イチゴの向きと吸着位置とを検出し(ステップS10,S12)、移動部を介して、一端部にイチゴと接触する接触部を有する筒状の吸着管を移動して、接触部をイチゴの吸着位置に接近させ、接触部がイチゴの吸着位置に接触する前に、吸着管の内部を負圧にする負圧発生機構の動作を開始する(ステップS18)。これにより、イチゴの方が、イチゴが載置されている面(載置面)から離れて吸着管に吸い寄せられるようになる。
(もっと読む)
整合装置及び封入封緘装置
【課題】用紙の幅寸法に対して封筒の幅寸法に余裕があるときに整合動作を省略して生産性を向上させる。
【解決手段】搬入した用紙の両側端を整合する整合部4を備えた整合装置1において、用紙を封入する封筒の封筒サイズ情報から得られる幅寸法から整合対象となる用紙の用紙サイズ情報から得られる幅寸法を差し引いた差分値と、予め設定された整合動作実行判別用閾値とを比較し、前記閾値を超えたときに整合動作を行わないように制御する制御部7を備えた。
(もっと読む)
位置補正装置、電気部品収納装置および電気部品検査装置
【課題】登録するために製品を正しい姿勢にする必要がない位置補正装置、電気部品収納装置および電気部品検査装置に関する。
【解決手段】ターンテーブルTの接線方向をX軸、半径方向をY軸としXY軸との原点O’と、搬送された電子部品の中点とのずれを検出する第1の検出手段と、XY軸の原点O’とターンテーブルの中心とを結ぶθ基準線に対する電子部品Wの角度のずれを検出する第2の検出手段と、前記搬送された電子部品を載置するステージSと、第1の検出手段及び第2の検出手段で検出したズレを戻す方向にステージSを移動させることにより、電子部品Wの姿勢を補正する移動手段と、を備える。
(もっと読む)
食品の搬送装置
【課題】挟持部材を開操作したときの開度を、送出位置で食品を挟持するときの開度に対して払出位置で食品を払い出すときの開度が小さくなるように設定することができる食品の搬送装置を提供すること。
【解決手段】製造工程から複数個ずつ並んで送出位置Aに送出された食品Wを、挟持部材2によって一旦挟持して持ち上げ、次工程の払出位置Bに整列した状態で払い出す食品の搬送装置1において、挟持部材2を開閉操作する挟持部材操作手段3と、挟持部材操作手段3によって挟持部材2を開操作したときの挟持部材2の開度を、送出位置Aで食品Wを挟持するときの開度に対して払出位置Bで食品Wを払い出すときの開度が小さくなるように設定する挟持部材開度設定手段4とを備えるようにする。
(もっと読む)
包装機における物品供給装置
【課題】ロボットを用いて物品を高速で搬送する包装機における物品供給装置を提供する。
【解決手段】定速回転する回転体12に所定の角度間隔で支持されるアーム20を有していて、回転体12が回転中において前記アーム20を回動させて、物品を吸着した吸着具25を、前記支持位置より前記回転体12の中心に近づけてから、該吸着具25を第2コンベヤ2の搬送方向に向けて移動させて物品を載置した後、該物品を載置したときの前記回転体の中心と支持位置16とを結ぶ線分に対するアームの角度より大きく広がるようにアーム20を回動させて、前記物品保持領域物品の物品を吸着する。
(もっと読む)
容器搬送装置
【課題】複数の容器を効率よく整列させ、充填率を高める容器搬送装置を提供する。
【解決手段】供給手段1から供給された所定数の容器の首部に係合して保持する、袋本体の幅よりも大きいピッチで配置された横移動可能な複数の仮置レール22からなる仮置手段2と、同じく首部に係合して容器を保持する複数の製品レール42からなる整列手段4を設け、製品レール42のピッチは仮置レール22のピッチの整数分の1であり、仮置レール22を順次横移動し整列レール42に合わせながら移載手段3A、3Bにより容器を仮置レール22から製品レール42に順次移載することにより、容器ピッチを狭めるとともに千鳥状に配列した容器群8Aを形成する。
(もっと読む)
横形製袋充填機における供給コンベヤの供給原点検出装置
【課題】高速処理される供給コンベヤの搬送速度に変化が生じても、誤検出することのない横形製袋充填機の供給原点検出装置を提供する。
【解決手段】搬送ラインに沿って配設されたガイドレール11の案内部13上を走行するチェーン15と、チェーン15に所定間隔毎に配設された押送部材18を備え、押送部材18の間に物品を支持してベッド12上で搬送する。ガイドレール11には案内部13の下側を支持すると共に押送部材18の下側に当接する支持部14が配設されている。案内部13には、チェーン15の走行領域外で、且つ、押送部材18が通過する領域で、搬送ラインに交差する側方に貫通した横孔24が形成されている。横孔24に光を通過させる光学式検出手段(反射型のセンサ26及び反射板27)を、ベッド12より下方で、ベッド12に開いた隙間12aの位置から外れた側方に配設して、押送部材18を検出する。
(もっと読む)
物品供給装置
【課題】複数個単位で切り出された集合品を、各物品が略隙間無く寄せられた状態で供給する。
【解決手段】供給コンベヤ22の上流側に接続される切り出しコンベヤ20は、物品貯留時には各コンベヤ20a,20b,20cに1個ずつ物品10を載置して停止し、物品切り出し時には切り出し数に対応する数のコンベヤ20a,20b,20cの走行を一斉に開始して供給コンベヤ22に切り出し数分の物品10を送り出す。供給コンベヤ22の搬送途中に、集合品を一対の支持片40,42で前後から挟んで各物品10を略隙間無く寄せた状態とする集合手段44が配設される。集合品の集合動作後に、前方に位置する一方の支持片40は搬送路外へ退避し、後方に位置する他方の支持片42は前進移動を停止または減速して次の集合品の集合動作を待機する。
(もっと読む)
姿勢制御装置
【課題】包装物を効率よく収納させる姿勢に制御させる姿勢制御装置を提供することである。
【解決手段】姿勢制御装置400においては、第1保持板410、第2保持板430を有する。第1保持板410、第2保持板430、第3保持板、一対の開閉装置440,441により略直立姿勢で集積された包装物800が集積方向の両側から保持される。また、包装物800をダンボール箱内に箱詰めする前に振動装置460により第1保持板410が矢印MV1の方向に往復移動され間隔が変動される。
(もっと読む)
充填装置
【解決課題】包装フィルムの各ポケット部に、異なる種類の被充填物を簡易に自動充填することのできる充填装置を提供する。
【解決手段】充填装置10は、被充填物T1〜T3の種類別に配設され、導出口と落下通路32とが設けられた可動シュート31を有する、充填ユニット30a、30b、30cと、所定のタイミングで作動するように連係制御された移動手段45と、を備え、包装フィルム15の平坦部16で導出口を塞がれた状態にある可動シュート31を、移動手段45によって往復動させ、導出口をポケット部17の列位置に周期的に略一致させることで、導出口から落下排出される被充填物T1〜T3を、対応するポケット部17にそれぞれ充填するように構成した。
(もっと読む)
箱詰め装置
【課題】互いに接触または近接した状態で搬送された複数の箱詰め対象体を互いに離間した状態で箱体に箱詰めする。
【解決手段】互いに接触または近接した状態で搬送された複数のテープカートリッジ200を所定長さだけ互いに離間した状態で整列させる整列機構11と、離間して整列された各テープカートリッジ200の整列状態を維持しつつ各テープカートリッジ200を保持して箱体に箱詰めする箱詰め機構13とを備え、整列機構11は、互いに接触または近接した状態で搬送された各テープカートリッジ200を1つずつ独立して載置可能に構成された複数の載置部22a〜22eと、各載置部22a〜22eにそれぞれ取り付けられた被案内部と、載置部22a〜22eが所定長さだけ互いに離間するように被案内部23a〜23dを案内する案内部24a,24bと、案内部24a,24bを移動させるエアシリンダ25とを備えて構成されている。
(もっと読む)
搬送装置
【課題】農作物の損傷を防止しつつ、農作物を容器内に適切に収容できる搬送装置を提供する。
【解決手段】搬送装置である規格内玉葱搬送手段51は、搬送手段55と、この搬送手段55を移動させる移動駆動手段56とを備える。搬送手段55の両端部には、搬送手段55からの玉葱Tを受け入れて下り傾斜方向に向けて搬送する端部搬送手段71を回動可能に設ける。端部搬送手段71の下方には規格内コンテナを保持する載置手段75が位置する。この載置手段75を回動させる回動駆動手段82を設ける。端部搬送手段71には距離検知手段91を設け、制御手段92が距離検知手段91の検知に基づいて回動駆動手段82および移動駆動手段56を制御する。
(もっと読む)
出荷トレイ装填装置
【課題】微小物体を出荷テープの装填孔に装填するための装置構成において、整列用のフィーダが別途要するなど装置全体が大がかりとなる点、及び搬送途中に微小物体の姿勢が乱れても補正できない点を解消する。
【解決手段】未整列トレイMT上方で微小物体(ワークW)の送り出し位置の直前に設けられたカメラC0と、未整列トレイMTから出荷トレイSTへ微小物体が移動するよう回転する回転テーブル2と、この回転テーブル2の回転経路途中に設けられ、カメラC0による撮像データに基づいて微小物体を整列させる補正機構(吸気装置4、補正装置5)と、を有する。
【効果】未整列トレイに微小物体を整列させて送るためのフィーダを排除することができるとと共に確実に微小物体を装填できる。
(もっと読む)
菓子などの移乗配列装置
【課題】上流側から順次送り込まれてくる菓子などを、走行中の配列コンベア上に複数列の縦列に横一列に配列可能とする菓子などの移乗配列装置を提供することである。
【解決手段】菓子などを一列縦隊に順次送り込むと共に鉛直軸を支点として水平方向に首振り自在な旋回コンベア1と、横移動自在であり、下流側のベルトの折り返し部となるベルト受け部が菓子などの搬送方向に水平移動自在とされる分配コンベア2を介して、下流側の配列コンベアB上に複数列の縦列に配列すると共に、前記配列コンベアのコンベア速度と、前記分配コンベアのコンベア速度と、菓子などを送り込むタイミングとから、走行中の配列コンベア上に横一列に整列すると共に複数列の縦列に順次配列するように、前記分配コンベアの横移動と前記ベルト受け部の水平移動とを制御する制御装置50を備える構成とした。
(もっと読む)
真空包装機への肉部位の包装供給方法及びその装置
【課題】制御器による演算によって、肉部位の長さ数値(A)をやや大きめに設定し、同部位を、包袋の底面に押し付けないように調整して、押し付け圧による部位の捩れ包装を防止する。
【解決手段】配置した包袋10の長さ数値(B)は予め電子的にインプットすることで制御器が記憶する。そこでこの記録信号に基づき、嘴型ホッパーで拡張した包袋10を、その設置位置(C)から仮シーラ64の原点位置(E)まで移動(D)させ、ほぼ同時に押し込み盤21は部位40を追跡状態で包袋10に押し入れる。この場合、部位の長さ数値が制御器から発信されると、その発信信号を受けて押し込み盤21はその原点(F)から<G>に相当する距離を移動して部位を包袋に押し入れる。つまり<G>なる値は、前記の原点(F)から仮シーラの原点(E)までの距離(H)に、包袋の長さ(B)を加算し、その値から、部位の長さ(A)を減算した演算数値である。
(もっと読む)
整列コンベア用供給装置及びその運転方法、並びに箱詰め装置。
【課題】無端軌道に載っている物品の回転角度を正確に判断することができ、かつ正確な回転角度の判断を比較的低コストで実現できる整列コンベア用供給装置の運転方法、及びその運転方法を利用した整列コンベア用供給装置及び箱詰め装置を提供する。
【解決手段】本発明の整列コンベア用供給装置の運転方法は、無端軌道204と、無端軌道204の上方に配設された二次元コード読み取り装置202と、二次元コード読み取り装置202と通信可能に構成された制御装置30と、を有し、二次元コード読み取り装置202が無端軌道204によって搬送される物品Wの上面に表示されている二次元コードQの読み取り角度を取得する角度取得ステップと、制御装置30が読み取り角度を二次元コード読み取り装置202から取得して読み取り角度に基づいて物品Wの回転角度を算出する回転角度算出ステップと、を有する。
(もっと読む)
物品箱詰め装置
【課題】 従来の物品箱詰め装置は、物品を定位置で積層するのに、簡単な構成で、処理スピードが速く、且つきれいに整列させた状態で積層できるものはなかった。
【解決手段】 コンベア装置1で順次搬送されてくる平面視矩形で薄形の物品Yをコンベア終端部1aから順次無停止状態で送出して、各物品Yをコンベア終端部1aの下方で待ち受ける収納箱X内に所定個数だけ積層状態で収納し得るようにした物品箱詰め装置において、コンベア終端部1aに、該コンベア終端部から送出される物品Yを乗り越させて減速させた後、表裏反転させて落下させるための物品減速反転部材2を取付けていることにより、物品Yを収納箱X内に、簡単な構成で、処理スピードが速く、且つきれいに整列状態で収納・積層できるようにした。
(もっと読む)
1 - 20 / 38
[ Back to top ]