
Fターム[3F027AA01]の内容
Fターム[3F027AA01]の下位に属するFターム
Fターム[3F027AA01]に分類される特許
21 - 40 / 76
容器搬送装置
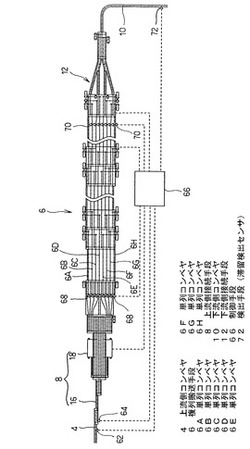
【課題】複数の単列コンベヤ6A、6B、6C、6D、6E、6F、6G、6Hを並列させた複列搬送手段6に容器2をアキュームする際に、衝撃が発生したり後方の容器から押し圧がかかることを防止する。
【解決手段】単列で容器を搬送する上流側コンベヤ4と前記複列搬送手段の間に上流側接続手段8を設け、上流側コンベヤといずれかの単列コンベヤとを選択的に接続する。複列搬送手段と単列で容器を搬送する下流側コンベヤ10の間に下流側接続手段12を設け。いずれか一つの単列コンベヤを下流側コンベヤに接続する。上流側接続手段と複列搬送手段を、その前後の搬送手段よりも低速で運転する。下流側コンベヤに設けた検知手段70が容器の滞留を検知したときに、上流側接続手段を切り換えるとともに、それまで容器を搬送していた単列コンベヤを停止させる。
(もっと読む)
ウォーキングビーム上のコイル異常検出方法およびコイル異常検出構造

【課題】ウォーキングビーム上のコイルがコイル先端部を周辺設備に引っ掛けて、転倒等を起こす前に、そのコイル異常を検出することができるウォーキングビーム上のコイル異常検出方法およびコイル異常検出構造を提供する。
【解決手段】ウォーキングビーム20により搬送されるコイル10がその先端部を周辺設備に引っ掛けたコイル異常を検出するために、コイル10の先端部が周辺設備に接触した際のコイル10の水平面内での回転挙動に追随してウォーキングビーム20が水平面内で旋回できるようにしておき、ウォーキングビーム20の水平面内での旋回動作を近接センサ25で検知することによって、当該コイル異常を検出する。
(もっと読む)
移動処理機
【課題】コンベアの折り畳みに伴うコンベアや処理装置の損傷を防ぐことができる移動処理装置を提供する。
【解決手段】走行体1上に配置される本体フレーム2と、この本体フレーム2に搭載される処理装置すなわち篩装置4と、この篩装置4で処理された粒度の異なる処理物をそれぞれ外部に排出させる第1排出コンベア5、第2排出コンベア6、及び第3排出コンベア8とを有し、第2排出コンベア6は輸送時に篩装置4に近接するように折り畳まれたものから成る自走式スクリーンにおいて、第2排出コンベア6が折り畳まれたことを検出する角度センサと、この角度センサで第2排出コンベア6が折り畳まれたことが検出されたとき、第1排出コンベア5、第2排出コンベア6、及び第3排出コンベア8の駆動を不能にする制御信号を出力する制御手段、すなわちコントローラとを備えた構成にしてある。
(もっと読む)
物品排除装置
【課題】
エアーを吹きつけて物品を生産ライン上から排除する構成であっても、適切に物品を排除することができる物品排除装置を提供する。
【解決手段】
本発明に係る物品排除装置100は、物品Aを一定方向に搬送するラインコンベア1と、エアーを吹きつけて物品Aをラインコンベア1から排除するエアージェット装置2と、物品Aの搬送状態を検出する搬送状態検出装置3と、エアージェット装置2を制御する制御部5と、を備えている。そして、制御部5は、搬送状態検出装置3で検出した物品Aの搬送状態に応じて、エアージェット装置2による吹きつけを制御する。
(もっと読む)
コンベアの駆動制御装置
【課題】誘導電動機に適正な給電制御を行うことにより、コンベア本体の簡易で効率のよい駆動制御が可能であり、また機能の異なるコンベア本体に対しても簡易かつ安価に対応が可能なコンベアの駆動制御装置を提供する。
【解決手段】金属の切削加工により生じたチップを搬送するコンベア本体13において、チップの詰まりが生じたとき、誘導電動機12に負荷が加わりその駆動電流が増加して、電流検出器の検出値が限界電流値以上になったとき、マイクロコンピュータにより限界電流値以上と判定されてインバータによる誘導電動機12への給電を停止させ、さらに所定時間後にインバータにより反転モードで給電を行わせ、誘導電動機12を反転させる。これにより、チップコンベア本体13に詰まったチップの詰まりを除くことができ、コンベアの回転力を最大限に活用しつつ誘導電動機12の焼損等の不具合を適切に回避することができる。
(もっと読む)
複合コンベア装置、複合コンベア装置の合流制御方法、およびコンピュータプログラム
【課題】待機ワーク数を支流コンベア間で平均化し、待機状態のワークによる上流側への影響を抑制し、合流待ち時間を抑制した搬送効率の高い複合コンベア装置、複合コンベア装置の合流制御方法、およびコンピュータプログラムを提供する。
【解決手段】複合コンベア装置1は、ワークWcをそれぞれ搬送する複数の支流コンベア10(支流コンベア10−1、支流コンベア10−2、・・・、支流コンベア10−m)と、支流コンベア10によって搬送されたワークWcを支流コンベア10に対応させたそれぞれの合流位置CP(合流位置CP−1、合流位置CP−2、・・・、合流位置CP−m)で合流させて搬送する本流コンベア20と、支流コンベア10から本流コンベア20へのワークWcの合流を制御する合流制御部30とを備える。
(もっと読む)
搬送制御装置及び搬送制御方法
【課題】被搬送物の搬送先の負荷が高くなった場合にも、処理装置の総体としてのタクトタイムの短縮を図り、また、枚葉搬送ラインにおいても、演算処理を要するデータ量を増大させず、大掛かりな演算処理装置が不要で、演算処理時間が長くならない搬送制御装置を提供する。
【解決手段】処理設備の各搬送装置を制御する制御手段2は、上位システムから仕分け条件を受信し、この仕分け条件に基づいて仕分け情報を生成し、生産ロットが開始済みであるかを判別し、開始済みであれば、処理設備の被搬送物の搬出ポートのうち、空の搬出ポートがあるか否かを判別し、生産ロットが完了済みであるかを判別し、優先度の高い仕分け条件があるかを判別し、生産ロットが完了済みであり、空の搬出ポートがあれば、優先度の高い仕分け条件にしたがって、搬出ポートに仕分け情報を割付け、この仕分け情報にしたがって、搬送装置3−1,3−2,・・・3−nを制御する。
(もっと読む)
クロスエリア搬送制御システム及びその制御方法
【課題】クロスエリア搬送制御システム及びその制御方法を提供する。
【解決手段】第一搬送整合システム1と、第二搬送整合システム2とは、異なるエリアにあり、第一搬送整合システム1と、第二搬送整合システム2とは、互いに電気的に接続され、且つ、第一搬送整合システム1は、さらに、クロスエリア制御システム4に電気的に接続され、クロスエリアストッカー3は、クロスエリア制御システム4と、第二搬送整合システム2に電気的に接続される。上述のシステム機構は、クロスエリア制御システム4が、独立して設置されるため、あるエリアの製造執行システムが故障停止した時でも、クロスエリアシステムは、正常に処理運転を行い、ウェーハが、クロスエリア伝送するときに影響を受け、停止することがない。
(もっと読む)
物体の有無、特定位置又は通過を検出するための検出器及び検出装置
【課題】占有スペースの増大を抑制しながら、可動側の検出器と固定側との配線処理を不要としてケーブルの断線を防止するとともに、可動側の検出器用バッテリーを不要にする。
【解決手段】RFIDタグ3の半導体チップ3Aとアンテナ3Bとの接続を切り離して外部に取り出した端子3C,3Dに、検出位置に設置した常時開形のスイッチ4を接続して検出器2とし、リーダ5がアンテナ5Bを通してRFIDタグ3にコマンドメッセージを送信し、RFIDタグ3からの応答メッセージを受信することができない場合はスイッチ4がオフである非検出状態とし、RFIDタグ3からの応答メッセージを受信することができた場合はスイッチ4がオンである検出状態とする。
(もっと読む)
コンベア装置
【課題】本発明は、電源器を小型にして過大な電流が検知された場合であっても、搬送時間が短く効率的な搬送ができるコンベア装置を提供することを目的とした。
【解決手段】搬送方向に並ぶ複数のゾーンに区分され、各ゾーンには少なくとも1の駆動用モータ14が設けられたコンベア装置1であって、駆動用モータ14に電力を供給する電源器11と、電源器11からの出力電流を監視する電流監視手段12とを有した回路構成を備えており、電源器11の過大な電流値を検知した場合には、その電源器11が支配するゾーンの中で、最上流に位置する駆動用モータ14を停止する構成とする。
(もっと読む)
物品計測方法およびその装置
【課題】本発明は、少ないセンサの数で物品の長さLと物品の幅Wに加えて物品の高さを検知できる物品計測方法およびその装置を提供することを目的とする。
【解決手段】物品13の移動方向と直角な方向に水平に光軸を配置した第1光センサ22と、前記移動方向と直角な方向とは第1所定角度α傾けて水平に光軸を配置した第2光センサ23と、前記移動方向に沿って、垂直な方向から斜めに第2所定角度β傾けて光軸を配置した第3光センサ24とを備え、第1光センサの光軸22aが、移動している物品13により遮光されている間の移動量と、第2光センサの光軸23aが、移動している物品13により遮光されている間の移動量と、第3光センサの光軸24aが、移動している物品13により遮光されている間の移動量を計測し、前記計測した移動量により物品長Lと物品幅Wと物品高さHを演算式により求める検出装置25を備える。
(もっと読む)
物品処理装置
【解決手段】 充填装置1はそれぞれスターホイール等の回転体を備えた供給コンベヤ2、インフィードスクリュー3、リンサ用供給スターホイール4、リンサ5、リンサ用排出スターホイール6、中間スターホイール7、フィラ用供給スターホイール8、フィラ9、フィラ・キャッパ用受け渡しスターホイール10、キャッパ11、キャッパ用排出スターホイール12、排出コンベヤ13から構成されている。
例えばフィラ9に異常が発生すると、制御手段14は第3ブレーキB3を作動させて上記フィラ9のスターホイールを強制的に停止させ、同時に、第1、第2、第4、第5サーボモータM1,M2,M4,M5を制御して、異常の発生していない設備のスターホイール等を上記フィラのスターホイールの停止時間で停止させる。
【効果】 所要の設備で異常が発生しても、各設備をほぼ同時に停止させて各設備の損傷等を防止することができる。
(もっと読む)
ガラス搬送装置及びその制御方法、並びに車両の製造方法
【課題】ガラスを精度よく取付位置まで搬送することができるガラス搬送装置、ガラス搬送装置の制御方法、及び自動車の製造方法を提供すること。
【解決手段】本発明の一態様にかかるガラス搬送装置は、自動車100のガラスをその取付位置まで搬送するガラス搬送装置である。ガラスを保持する吸着治具60と、吸着治具60を移動させるための関節52を有するアーム機構50と、吸着治具60で保持したリアガラス2bを、ボディ101形状に応じた仮想ガイドGrに沿って移動させるよう、アーム機構50を制御する制御部80とを備えている。フロントガラス2aの取付位置の高さを記憶し、取付位置の高さに応じて仮想ガイド高さを算出し、仮想ガイド高さの仮想ガイドGrに沿って、リアガラス2aを移動させている
(もっと読む)
搬送装置
【課題】安価な検出スイッチを用いてワークの端部の位置を特定することが可能な搬送装置を提供する。
【解決手段】検出手段は物体の移動方向に並置された第一および第二の検出スイッチを有する。制御手段は第一の検出スイッチが物体を検出したときに動力手段を停止させる。判定手段は第一の検出スイッチが物体を検出したのち第二の検出スイッチが物体を検出していない状態が所定時間以上継続した場合に物体が所定位置に停止したと判定し、第一の検出スイッチが物体を検出したのち所定時間以内に第二の検出スイッチが物体を検出した場合に物体が所定位置を超えたと判定する。
(もっと読む)
塵芥運搬装置
【課題】パイプシュートの勾配が緩やかであったり、多少湾曲した形状であっても、パイプシュート内に塵芥が残留することを防止できるようにする。
【解決手段】高所で収集された塵芥60を、低所に運搬するための塵芥運搬装置1であって、筒状の部材からなり、高所から低所へ所定の勾配を付けられて設置され、上流端の近傍に投入口15が形成され、下流端又はその近傍に排出口16が形成されてなるパイプシュート5と、前記パイプシュート5内に配置され、該パイプシュート5内を移動可能にする駆動手段を具備し、該駆動手段によって前記投入口15の上流側から前記排出口16又はその近傍にかけて移動することにより前記パイプシュート5内に投入された塵芥60を前記排出口16まで押し動かす運搬装置6と、前記運搬装置6の遠隔操作を可能にする遠隔操作手段7とを具備する。
(もっと読む)
ストックコンベア上ワーク数検出方法
【課題】ストックコンベア上のワークの数を正確に把握可能なストックコンベア上ワーク数検出方法の提供。
【解決手段】ワーク11を搬送するストックコンベア20と、ストックコンベア20上に備えられワーク無し状態を検出する第1検出センサ31と、ワークフル状態を検出する第2検出センサ32とを備えるストックコンベア上ワーク数検出方法において、ワーク11をカウントするワークカウンタと、第1検出センサ31と連動する第1タイマーと、第2検出センサ32と連動する第2タイマーとを備え、第1検出センサ31がワーク11を検出しなくなったことをトリガーに第1タイマーが作動し、第1タイマーが第1設定値を越えた時点で、ワークカウンタのカウント数を0とし、第2検出センサ32がワーク11を検出したことをトリガーに第2タイマーが作動し、第2タイマーが第2設定値を超えた時点で、ワークカウンタのカウント数を規定値とする。
(もっと読む)
搬送装置
【課題】搬送方向の下流側に隣接する搬送手段にて搬送物を非接触状態で支持して搬送しながら、複数の搬送手段間で搬送物を乗り移らせて搬送することができる搬送装置を提供する。
【解決手段】搬送物2の下面部に向けて空気を送風して、搬送物2を非接触状態で支持する送風式支持手段と、その送風式支持手段にて支持される搬送物に対して搬送方向での推進力を付与する推進力付与手段とを備えた搬送手段1が、搬送方向に複数並べて設けられ、それら複数の搬送手段1の運転を制御する制御手段Hが設けられている搬送装置において、制御手段Hは、搬送方向の下流側に隣接する搬送手段1が運転状態である搬送手段1については、運転開始を許容し、搬送方向の下流側に隣接する搬送手段1が非運転状態である搬送手段1については、運転開始を禁止するように構成されている。
(もっと読む)
搬送装置
【課題】倒立状態の容器を停止させる安価な機構を備える装置を提供する。
【解決手段】搬送装置は、空缶10を搬送路60に沿って搬送する。空缶10は、底部が絞られていて上部12がオーバーハングした形状を有する。搬送装置は、上部12が上方を向いた正立状態の空缶10の搬送を許し、上部12が下方を向いた倒立状態の空缶10を停止させる缶制御部材42を有する缶制御機40を備える。倒立状態の空缶10は、その上部12は、缶制御部材42に引っ掛かることによって停止する。
(もっと読む)
テーブル搬送物の自動搬送方法および装置
【課題】デッドロックを発生させずに、複数の搬送物の自動搬送を可能とする、テーブル搬送物の自動搬送方法および装置を提供することを課題とする。
【解決手段】対象とする搬送物のルートを登録するに際して、各テーブル間の移動方向を確認し、ルート上全てのテーブル間で他の搬送物の逆方向の移動が存在しない場合に、ルート上のテーブル間の移動を予約するとともに、予約したテーブル間の前記ルートと逆方向への移動の予約を禁止するルート登録ロジック工程と、搬送物のルート登録後、次搬送先のテーブルが使用中であるかを確認し、使用中で無ければ次搬送先のテーブルに搬送するとともに、この搬送方向への他の搬送物の移動予約がなければ、前記搬送方向と逆方向への移動の予約禁止を解除する搬送ロジック工程とを有する。
(もっと読む)
搬送装置
【課題】搬送ベルト上で被搬送物が傾斜して載置されるおそれがある場合に、被搬送物が正しい姿勢で載置されているか否かを検出する。
【解決手段】搬送ベルト21及び22には突出部21a及び22aがそれぞれ形成されている。搬送ベルト21及び22上の容器100を挟むように光センサ31及び32が設置されている。搬送ベルト21及び22は下方に湾曲するように搬送ローラ16等によって誘導され、これによって、光センサ31及び32の射出光Pが突出部21a及び22aの先端より下方を通過して容器100に向かうように構成されている。容器100が傾斜しているときには、光センサ31及び32の一方において反射光又は散乱光が検出され、他方において検出されないことにより、容器100が傾斜しているか否かを判定できる。
(もっと読む)
21 - 40 / 76
[ Back to top ]