
Fターム[3F072GE02]の内容
Fターム[3F072GE02]に分類される特許
21 - 40 / 48
エアシリンダ装置
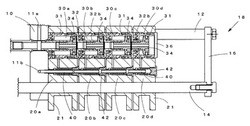
【課題】 可動部の構成を簡素化して駆動部の小型化、軽量化を図ることを可能とし、種々のワークの移載に好適に使用できるエアシリンダ装置を提供する。
【解決手段】 スライド枠18と複数個の可動ブロック20a〜20dと、圧力エアを利用して前記可動ブロックを、相互間隔が狭間隔となる閉じ位置と、広間隔となる開き位置との間で進退動させる駆動機構とを備えたエアシリンダ装置であって、前記駆動機構として、前記各々の可動ブロックにシリンダ室とピストンとを備えたピストン機構30a〜30dを、前記ピストン34の移動方向をガイドロッドの軸線方向に平行に設けるとともに、可動ブロックが移動する全移動位置において前記シリンダ室をすべて連通させて設け、シリンダ室に装着されたピストン34の前部側に圧力エアを供給するエア流路と、ピストン34の後部側へ圧力エアを供給するエア流路とを独立に設け、ピストンの前部側と後部側への圧力エアの供給を切り替え制御することにより、可動ブロック20a〜20dを開き位置と閉じ位置に移動させる。
(もっと読む)
容器保持装置

【課題】スターホイールから回転テーブルへの移送の際に、アーム及びアーム軸が障害とならず、簡単且つ丈夫な駆動機構で動作される容器保持装置を提供する。
【解決手段】 本発明は、容器台12上の保持領域12aに対して一方の側から搬入される壜BTを、保持領域12aの他方の側の受け部46bにて受け止めつつアーム19により保持領域12a内に抱え込む容器保持装置において、保持領域12aの周囲にて上下方向に延びるように配置されたアーム軸26と、アーム軸26を保持領域12aの周囲の第1の位置Pとそれよりも保持領域12aの他方の側に後退した第2の位置Qとの間で駆動するアーム駆動機構27と、を具備し、第1の位置Pにてアーム19の先端部が保持領域12aの一方の側に進出し、第2の位置Qにてアーム19の先端部が保持領域12aの他方の側に後退するようにしてアーム19をアーム軸26に取り付ける。
(もっと読む)
搬送装置及びそれを備えた計量梱包システム
【課題】受入位置で物品を安定した姿勢で受け入れることができ、もって集積姿勢が乱れることのない搬送装置及びそれを備えた計量梱包システムを提供する。
【解決手段】受入位置P1で搬入コンベア6から供給された物品Xを受け入れて下流側の集積搬送装置12へ受け渡す受渡装置7に、受入位置P1においてほぼ水平姿勢で1個ずつ物品Xを受け入れたのち、起立姿勢方向に回動して該物品Xを起立させると共に、集積搬送装置12のバケット44に該物品Xを受け渡す受渡台24…24を備え、かつ、該受渡台24…24の載置面を櫛歯状として隙間を設ける。そして、受け入れた物品Xを該隙間を介して載置面に吸引保持する吸引機構33を備え、この吸引機構33を、吸引ポンプ34と配管35と吸引口が設けられた吸引箱36とで構成する。
(もっと読む)
プラスチックボトル搬送装置
【課題】成形した直後のボトルをエア搬送路に受け渡す際にボトル同士が衝突して変形するのを防止する。
【解決手段】ブロー成形機1からボトルを搬出するシステムは、回転式のボトル取り出し機1によって各成形型2から取り出されたボトル10がスターホイール18を介してネック式エア搬送路17に送り出される。スターホイール18の凹所27には、その深部を規定する面29の進み側に窪み50が形成されている。
(もっと読む)
垂直搬送装置
【課題】簡素な構造で搬送物を連続かつ安定して搬送できる垂直搬送装置を得る。
【解決手段】垂直搬送装置は、水平に対して傾斜させて回転可能に設けた3枚の外円板3、これらの外円板3に対して同心に水平かつ回転可能に設けた3枚の内円板5、外円板3を回転駆動する駆動機構、内円板5を回転駆動する駆動機構、外円板3の上の搬送物を落下させるのを助けるスクレーパ41、および内円板5の上の搬送物を落下させるのを助けるスクレーパ42を備えている。外円板3の下位部に落下した搬送物はその上位部に位置させて同位の内円板5の上に落下させ、その内円板3上の搬送物は上位の外円板3の下位部に位置させてその上に落下させる。
(もっと読む)
物品の受け渡し装置
【課題】両受け渡し領域において、容器を円滑、かつ確実に受け渡すこと。
【解決手段】回転式のラベラ1の回転体3とロボット15との間に容器2を受け渡す第1受け渡し装置14を備えている。 第1受け渡し装置14は、水平面で循環走行されるタイミングベルト28と、このタイミングベルト28に等間隔で設けた保持手段を備えている。 保持手段はカム部材とカムフォロワとによって移動を案内されるようになっている。そして、各保持手段は、受け渡し領域Eで直線状に移動されてロボット15から容器2を受け取る。他方、受け渡し領域Fでは、容器2を保持した各保持手段が、回転体3の円弧状の移動軌跡に追従して移動して、回転体3側の保持手段31へ容器2を受け渡すようになっている。
(もっと読む)
ハンドリング装置、作業装置及びプログラム
【課題】搬送される複数の物品に関する情報を効率的に処理できるハンドリング装置を提供する。
【解決手段】ハンドリング装置1は、ワーク100を搬送するコンベア2と、ベルト12を分割した複数のトラッキング範囲R5の画像を取得してワーク100の位置を検出する視覚センサ3と、ベルト12の移動量を検出するエンコーダ4と、エンコーダ4の検出する移動量に基づいて、複数のトラッキング範囲R5の移動量を監視し、ワーク検出エリアR12を通過中のトラッキング範囲R5を特定するトラッキングマネージャ21bと、トラッキングマネージャ21bにより特定されたトラッキング範囲R5内において物品を選択するワークマネージャ21cと、ワークマネージャ21cにより選択されたワーク100を保持するようにロボット5の動作を制御する制御部21dとを備える。
(もっと読む)
容器処理装置
【解決手段】 ラベラ1は、容器2を保持する複数の保持手段31を有する回転体3と、両ステーションA、Bに配置したラベル貼り付け機構4,5を備えている。
回転体3の隣接位置に第1受け渡し機構14を設けてあり、さらにその隣接位置に容器2を搬送する供給コンベヤ13とロボット15を設けている。
ロボット15は、供給コンベヤ13が搬送する横転状態の容器2を吸着保持してから正立状態に起立させ、その後、受け渡し領域Eにおいて第1受け渡し機構14の保持手段26へ受け渡す。
第1受け渡し機構14の保持手段26は、受け渡し領域Fにおいて容器2を正立状態のままで回転体3側の保持手段31へ受け渡す。
【効果】 自立できない容器2であってもキャリヤを用いることなく搬送して、ラベルを貼り付けることができる。
(もっと読む)
搬送装置
【課題】 搬送速度の高速化に対応でき、方向規制を安定化できる搬送装置を提供する。
【解決手段】 本発明の搬送装置1は、搬送対象の容器を水平方向に搬送するターンテーブル10を有している。ターンテーブル10に対して鉛直方向の軸線CL2を中心として回転自在な旋回軸12と、旋回軸12の上端部に設けられて容器を支持する容器台13と、旋回軸12の下端部に設けられて軸線CLから一方向へ偏るようにして延びるアーム20と、アーム20と接し、かつ水平方向に延びる案内面31を有する接触プレート30と、を備え、接触プレート30を分割してアーム20に外乱を与える。
(もっと読む)
物品搬送装置
【課題】塑性変形や摩耗を生じさせずに搬送アームを搬送ロッドに繰り返し着脱させる。
【解決手段】後搬送アーム22のロッド係合部材22は、第一及び第二の後搬送ロッド17a、17bに異なる方向から着脱可能な第一の嵌合凹部23及び第二の嵌合凹部24を有し、第一の搬送ロッド回りに回動可能である。ロッド係合部材に押え部材27を支軸26回りに回動可能に支持する。ロッド係合部材に設けた板ばね28上端の把持部28aは第一嵌合凹部内に位置して第一搬送ロッドを弾性で係止する。板ばね下端の付勢部28bは押え部材を弾性的に押して、押え部材の凹部27aを第二搬送ロッドに嵌合させて後搬送アームを係止する。離脱時には、押え部材を逆方向に回動して第二の嵌合凹部を第二搬送ロッドから外して第一嵌合凹部を第一搬送ロッドから斜め下方に引き抜く。前搬送アーム30も後搬送アームと同一構成で対向させて押え部材で物品を挟持する。
(もっと読む)
ボトル把持体及びボトル口部を把持する方法
【課題】ボトルを搬送する際に発生するボトルの遠心力傾斜を抑制し、搬送中のボトルの姿勢が安定すると共にボトル受渡し時における把持ミスが生ずることのないボトル把持体を提供する。
【解決手段】ボトルを把持する開閉式グリップ装置10に於いて、ボトル口部110の円筒部113を把持するグリップ部11と、ボトル口部の雄ネジ部111を把持するネジサポート部12とを備え、かつ、ボトル口部の円筒部からボトル口部の雄ネジ部までを一体的に把持できるように、前記グリップ部とネジサポート部とが上下方向の厚みを有し一体として形成されていることを特徴とするボトル把持体10。
(もっと読む)
チップ状電子部品素子の外部電極形成方法及び装置
【課題】
チップ保持のための弾性体のめくれを防止し、チップ保持姿勢を安定化させる。
【解決手段】
本発明では、スリット状貫通孔を有する弾性体を備えたベルト状の部品保持具におけるスリット状貫通孔の長辺側方から、チップ状電子部品素子を差し込むようにして挿入し、弾性体のスリット状貫通孔によりチップ状電子部品素子を挟持した部品保持具を搬送し、チップ状電子部品素子の所定の部位に外部電極用の導電ペーストを塗布する。このように弾性体のスリット状貫通孔の長辺側方から差し込むように挿入するため、弾性体の下側から押し上げる場合に比して挿入反力が働かず、めくれを防止することができる。また、めくれがないため、チップ保持姿勢を安定化させることも可能である。
(もっと読む)
飲料充填システム、カム動作装置
【課題】 カムローラの偏摩耗等を防止し、耐久性、装置の信頼性を向上させるとともに、環境のクリーン度を維持できる技術を提供することを目的とする。
【解決手段】 カムプレート68、69の手前に衝撃緩和部材120Aを設け、回転体の回転に伴い、カムプレート68、69にカムローラ67が当たるに先立ち、カムローラ67を、衝撃緩和部材120Aの板状部材121に当てるようにした。これにより、カムローラ67は、板状部材121との間に生じる摩擦により、回転を始める。また、板状部材121は傾斜面を形成するようにし、しかも付勢部材122を弾性変形可能とすることで、カムローラ67が板状部材121に衝突したときに、付勢部材122によってその衝撃を吸収するようにした。
(もっと読む)
キャッパ
【課題】キャッピング時に容器2を停止させる際の衝撃を緩和するとともに、処理能力を向上させる。
【解決手段】フィラ4から排出された充填済みの容器2をメインコンベヤ12によって連続的に搬送する。メインコンベヤ12と並行して、このメインコンベヤ12よりも低速のサブコンベヤ16を配置し、前記メインコンベヤ12上の容器2をガイド手段50によってサブコンベヤ16上に案内する。この低速のサブコンベヤ16に移した容器2を、間欠的に回転する供給ホイール40によって停止させ、キャッピングポジションBに送ってキャッピングを行う。フィラ4から容器2を排出するメインコンベヤ12は高速走行させながら、容器2を停止させる際にはサブコンベヤ16による低速の状態で行うので、停止時の衝撃により充填液がこぼれたり容器2が転倒することを防止することができる。
(もっと読む)
搬送システム
【課題】コンベアにより搬送されてくる搬送ワークを仕分けロータにより一定間隔にする場合に、搬送ワークがコンベア側壁と仕分けロータ外周との間に挟み込まれないようにし、低騒音で、機械的摩擦や衝撃が少なく、高速で搬送が可能なシステムを提供する。
【解決手段】搬送システム10は、ガイド側壁12Aを備えたコンベア12と、コンベア12と平行な面内で回転され、搬送されてくる搬送ワーク16を捕捉する仕分けロータ20と、この仕分けロータ20の外周と前記ガイド側壁12Aとの間での搬送ワーク16の噛み込みを防止するための噛み込み防止用ローラ46とを有してなり、仕分けロータ20は、外周端面に、円周方向等角度間隔で、切欠状の搬送凹部28を有し、前記噛み込み防止用ローラ46は、仕分けロータ20との間に、搬送ワーク16を挟み込む位置に配置され、搬送ワーク16を、コンベア12による搬送方向と逆方向に戻すように回転される。
(もっと読む)
ターンテーブル及びそれを用いたターンコンベア並びにコンベア用受け皿
【課題】 円筒形状等の向きが変わりやすい搬送物をその向きを保ちつつ、搬送方向を変えることができるターンテーブル及びそれを用いたターンコンベア並びにコンベア用受け皿を提供することを課題とする。
【解決手段】 本ターンテーブル12は、円錐の軸を中心にして回転する円錐部121と、該円錐部12の傾斜面に設けられ、搬送物を載置して搬送する摩擦層122と、該円錐部121の周に沿って設けられるテーブルガイド123と、を備える。また、第1コンベア11a及び該第2コンベア11bは、コンベア110と、少なくとも該コンベア110の一方側に設けられる壁部112と、コンベア110の上方に該壁部112から間隔を空けて設けられるコンベアガイド113と、を備える。このようなターンコンベアは、円筒形状等の向きが変わりやすい搬送物をその向きを保ちつつ、搬送方向を変えることができる。
(もっと読む)
容器把持装置及びその装置を備えた袴挿入システム
【課題】 上流の容器整列機から渡される容器の向き(位相)にズレがあっても、そのまま袴の上部の入口すりばち形状部に乗り上げないように、容器が乗り上げたとき受ける力を利用して入口形状の位相に合うように容器が自在に回転できる容器把持装置及びそれを用いた袴挿入システムを提供する。
【解決手段】 容器把持装置にカム溝部を設け、その溝の頂きに置ける安定点にローラが収まるようにスプリングで押し付けた状態を通常的あるいはフリーとし、その把持装置に把持された容器を袴に挿入しようとする時、もし乗り上げればその反作用力でスプリングを圧縮し、ローラが安定点より離れ、左右回転の自由度を得て、自動的に袴に挿入されるように回転して確実に挿入処理が行われる容器把持装置と、その容器把持装置を用いたホイールを使用した所定速度で稼動することを特徴とする袴挿入システム。
(もっと読む)
金属製容器を連続的に局所変形及び/又は拡張変形させる装置
【課題】金属製容器を連続的に局所変形及び/又は拡張変形させる装置を提供する。
【解決手段】押出された又は引き抜かれた引き抜き管状体により構成される金属製容器を連続的に局所変形及び/又は拡張変形させる装置であって、係る装置は、(A)インターフェースモジュール(1)、(B)少なくとも1つのジョブモジュール(2、2’、2”)及び(C)反転モジュール(3)を具える。また、モジュールは、閉鎖経路を形成するよう構成されており、インターフェースモジュール(1)は、フィーディングステーション又はドラム(12)、アンロードドラム(16)及び所定の操作数に応じて、容器をジョブモジュール(2、2’、2”)又はアンロードドラム(16)に再供給するための、少なくとも1つの選択的送出要素を具える。
(もっと読む)
梱包用移送装置
【課題】 コンベアから梱包位置へ被梱包物を移送する際に、被梱包物が姿勢を崩したり転倒することのない梱包用移送装置を提供することを目的とする。
【解決手段】 移送体3は被梱包物Pを保持そして保持解除可能な保持部材4と、該保持部材4を水平方向に移動かつ該水平方向と水平面で直交する方向の軸線まわりに回動せしめる駆動機構5とを備え、該駆動機構による保持部材の移動軌跡Cは、被梱包物の保持後の移送工程では第一位置から曲線域C1を経て直線域C2へ移行して第二位置Yへ達し、保持解除後の戻り工程で第二位置から第一位置へ復帰し、上記移送工程における上記曲線域から第一位置から発する部分で上昇成分を有しそして直線域が下方に向いているように形成されている。
(もっと読む)
容器兼用可能な充填ラインの容器搬送システム
【課題】 ボトル缶とPETボトルに兼用でき、交換部品を殆ど要しない、充填ラインの容器搬送システムを提供する。
【解決手段】 ボトル缶を取り扱うときは、供給コンベアから容器割り出しスクリュによって所定ピッチに割り出されて送られ、リンサでは口部グリッパにより、リンサ以降のフィラ、キャッパと排出コンベアまでの各機能装置間の受渡しは、容器底面ガイド板とロータリ把持ポケットにより搬送し、また、PETボトルを取り扱うときは、供給コンベアから容器割り出しスクリュによって所定ピッチに割り出されたPETボトルは、リンサからフィラ間は口部グリッパにより搬送し、キャッパから排出コンベアまでは容器底面ガイド板とロータリ把持ポケットによる受渡しができるように、各機能手段の間にロータリ把持ポケットと容器底面ガイド板と口部把持グリッパとを併有する受渡し用ロータリホイールを備えた容器兼用可能な充填ラインの容器搬送システム。
(もっと読む)
21 - 40 / 48
[ Back to top ]