
Fターム[3F081BC04]の内容
コンベア上の物品の姿勢制御 (7,432) | 整列 (531) | 物品を適正な姿勢、方向に修正するもの (359) | 所定の搬送ラインに揃えるもの (96)
Fターム[3F081BC04]の下位に属するFターム
物品を搬送路の中央に寄せるもの (11)
Fターム[3F081BC04]に分類される特許
1 - 20 / 85
循環搬送装置
【課題】搬送路の進路方向を変更するガイド部材を有する循環搬送装置において、既存の設備を有効利用し、進路方向を変更して搬送する際の飲食物容器の搬送を円滑に行うことができる循環搬送装置を提供する。
【解決手段】寿司皿Sを循環搬送路5に従って循環搬送する循環型飲食物搬送装置1において、循環搬送路5a、5b間を接続して循環搬送経路を短縮させるバイパス搬送路6を構成するバイパス搬送装置10を有し、バイパス搬送装置10は、循環搬送路5a、5b間を接続して寿司皿Sを搬送する搬送部11と、搬送される前寿司皿Sに接触してガイドすることで当該寿司皿Sの進路方向を変更させるガイド部材R1、R2と、ガイド部材R1、R2に装着され、寿司皿Sの前記進路方向が変更されるときに、変更後の進路へ向かいやすいように形状が形成されたアタッチメント部材T1と、を備える。
(もっと読む)
搬送装置

【課題】被搬送物の姿勢を変更するための物体とガイドとの隙間に、被搬送物の包材が嵌まり込まないようにした搬送装置を提供する。
【解決手段】搬送装置100では、制御部190は、包装物Bが突出状態の突出体121と当接して回転する際、突出体121を包装物Bの搬送方向と交差する方向に水平に移動させるので、包装物Bのコーナーが突出体121とガイド部材110との隙間に嵌り込むことが防止される。その結果、包装物Bが回転できないという事態が回避される。特に、軟包装商品はコーナーが突出体121とガイド部材110との隙間に嵌り込み易いので、その効果は格別である。
(もっと読む)
搬送装置、インクジェット記録システム及びインクジェット記録方法
【課題】搬送対象の物品を好適に搬送することができる搬送装置、搬送装置を有するインクジェット記録システム、及び、インクジェット記録システムで実行されるインクジェット記録方法を提供することを目的とする。
【解決手段】搬送装置1は、複数の搬送ローラ10と、直交方向の第一の側及び第二の側のうちの第一の側に設けられ、搬送中の物品3の基準側面部に接し、直交方向において、搬送中の物品3の位置決めをする第一ガイドローラ90とを有する。複数の搬送ローラ10は、回転軸22と傾斜ローラ本体24とを有し、回転軸22が、搬送中の物品3を第一の側に斜行させる方向に傾斜した傾斜ローラ20を含む。傾斜ローラ20は、物品3の基準側面部が第一ガイドローラ90に接した状態で、物品3が第一ガイドローラ90から受ける反力に応じて、傾斜ローラ本体24を、回転軸22の軸方向において、第二の側に移動させる移動機構を有する。
(もっと読む)
容器搬送装置
【課題】多数のボトルを隙間なく一列縦隊にして搬送する際、先頭のボトルに過大な押圧力が掛るのを抑制する。
【解決手段】ラベル装着装置2には複数のコンベアCV1,CV2,…を一列に配置して多数のボトルBをラベル装着装置2に供給するラベル搬送装置3が設けられる。制御部31は、スクリュー310が設けられたコンベアCV1の搬送速度をラベル装着装置2における容器処理速度Wに基づく搬送速度v1に制御し、コンベアCV1の上流側に連結されたコンベアCV2の搬送速度を容器処理速度Wに基づく、搬送速度v1よりも低速の搬送速度v2に制御する。v2<v1とすることによりコンベアCV1のオーバーラップ部OLP1でボトル間に隙間が生じるようにする。
(もっと読む)
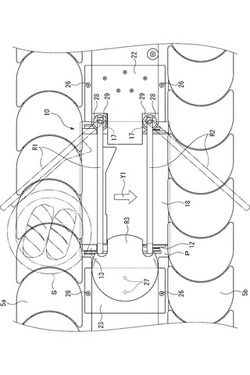
搬送装置
【課題】耐久性の低下を可及的に招来することなく、被搬送物の搬送効率を向上することのできる搬送装置を提供する。
【解決手段】第1搬送経路R1上で移動する予め定められた載置目標場所に被搬送物Sを載置すべく、載置目標場所が3次元空間における予め定められた位置に到達するのと同期して、被搬送物Sを第1搬送経路R1と異なる第2搬送経路R2を介して前記予め定められた位置に搬送するための第2搬送部3と、第2搬送経路R2上の搬送出口ETに被搬送物Sが到達したことを検出する出口センサ16と、この検出時点における被搬送物Sの理想位置に対する実際位置の位置ずれ量を算出する走行距離検出処理部27と、被搬送物Sの検出時点から予め定められた搬送速度制御対象期間に、前記位置ずれ量に応じ、停止以外の速度範囲内で第2搬送部3の搬送速度を調整する搬送速度算出部28及び搬送制御部29とを備えた。
(もっと読む)
鶏卵整列装置
【課題】鶏卵の損傷を防ぎながら、均等な間隔で整列させることができる鶏卵整列装置を提供する。
【解決手段】本発明に係る鶏卵整列装置は、X方向へ鶏卵Eを搬送する搬送部1と、鶏卵Eを搬送部1の幅方向へ分散しながら停留させる停留部2と、停留部2の下流側に隣接し、搬送部1の幅方向に均等な間隔となるように鶏卵Eを案内する案内部3と、案内部3が案内する間隔と同じ間隔で鶏卵Eを整列させる整列仕切部4とを備えている。鶏卵Eは、案内部3によって整列仕切部4の上流側先端に直接接触しないように案内されるので、鶏卵Eの損傷や、整列仕切部4で形成された通路の入り口に鶏卵Eが重なり合って詰まることを防げる。また、鶏卵Eは、停留部2によって搬送部1の幅方向へ分散されるので、整列仕切部4で形成された複数の通路に偏りなく鶏卵Eを整列させることができる。
(もっと読む)
食品移送装置
【課題】所定間隔をあけて順次連続して搬送されてくる食品のその後の処理を効率よく行うことができるよう、食品をトレイ上に連続的に移送することができる食品移送装置を提供すること。
【解決手段】食品Aを順次連続搬送する第1搬送手段12と、第1搬送手段12の一側に搬送方向に沿って延設された押出板24を備え、押出板24により食品Aを第1搬送手段12の他側に押し出すよう構成された押出手段14と、第1搬送手段12の下方に配設された、トレイ18を第1搬送手段12の搬送方向に対して垂直方向に搬送する第2搬送手段16と、第2搬送手段16にトレイ18を供給するトレイ供給手段20とを備えた食品移送装置10である。
(もっと読む)
搬送装置
【課題】物品を整列させて定量ずつ送り出す際に、物品が脆弱性を有していても変形させることはなく、かつ、搬送時間を短縮して搬送効率を向上させる。
【解決手段】搬送装置1は、整列ステージ2と、送り出しステージ3とを備えている。整列ステージ2は、供給された複数の物品を整列させる。送り出しステージ3は、整列ステージ2から供給される物品が載置され、回動することで載置された物品を送り出す回動テーブル21と、回動テーブル21に載置された物品の進路を閉鎖し、回動テーブル21が物品を送り出すときに物品の進路を開放するシャッタ24とを有する。そして、送り出しステージ3の回動テーブル21は、載置された物品を送り出すときに、整列ステージ側の端部31bによって整列ステージ2から供給される物品の移動を規制する。
(もっと読む)
振り分け装置
【課題】低コストで、かつ多種の物品に対して1の列から多数列に安定して振り分けを行うことができる振り分け装置を提供することである。
【解決手段】本発明の振り分け装置100,100aにおいては、入口回転ローラ200と出口回転ローラ400とにゴム搬送部材300が掛けられている。そして、出口回転ローラ400がスライド移動する。したがって、伸縮自在のゴム搬送部材300を用いることで、物品の底面を、入口から出口まで確実に保持することができる。
(もっと読む)
長尺農作物の方向修正搬送装置
【課題】長尺農作物の方向修正搬送のオートメーション化。
【解決手段】長手方向の一端側の向きが搬送方向下流側方向でないと識別された長尺農作物Aを、この長尺農作物Aの一端側の向きを搬送方向下流側方向に向かせるように修正しながら、コンベア3Bの搬送方向と交差する方向を搬送方向とするシュータ6に送り出し、長手方向の一端側の向きが搬送方向下流側方向であると識別された長尺農作物Aを、その向きを保った状態でシュータ6に送り出すようにし、このシュータ6は、向きが修正されて送り出される長尺農作物Aを、その向きを保った状態で搬送する。
(もっと読む)
ターンテーブル及びそれを用いたターンコンベア並びにコンベア用受け皿
【課題】円筒形状等の向きが変わりやすい搬送物をその向きを保ちつつ、搬送方向を変えることができるターンテーブル及びそれを用いたターンコンベア並びにコンベア用受け皿を提供することを課題とする。
【解決手段】本ターンテーブル12は、円錐の軸を中心にして回転する円錐部121と、該円錐部12の傾斜面に設けられ、搬送物を載置して搬送する摩擦層122と、該円錐部121の周に沿って設けられるテーブルガイド123と、を備える。また、第1コンベア11a及び該第2コンベア11bは、コンベア110と、少なくとも該コンベア110の一方側に設けられる壁部112と、コンベア110の上方に該壁部112から間隔を空けて設けられるコンベアガイド113と、を備える。このようなターンコンベアは、円筒形状等の向きが変わりやすい搬送物をその向きを保ちつつ、搬送方向を変えることができる。
(もっと読む)
包装機における物品供給装置
【課題】ロボットを用いて物品を高速で搬送する包装機における物品供給装置を提供する。
【解決手段】定速回転する回転体12に所定の角度間隔で支持されるアーム20を有していて、回転体12が回転中において前記アーム20を回動させて、物品を吸着した吸着具25を、前記支持位置より前記回転体12の中心に近づけてから、該吸着具25を第2コンベヤ2の搬送方向に向けて移動させて物品を載置した後、該物品を載置したときの前記回転体の中心と支持位置16とを結ぶ線分に対するアームの角度より大きく広がるようにアーム20を回動させて、前記物品保持領域物品の物品を吸着する。
(もっと読む)
コンベヤ装置
【課題】簡単な構造で、接触による衝撃や滞留をなくし、搬送速度を維持しつつ、姿勢を大きく変化させずに被搬送物を幅方向所定の位置に正確に整列させるコンベヤ装置を提供すること。
【解決手段】ボールコンベヤ110の下端から突出したフリーボール111に回転力を与える接触駆動機構によってボールコンベヤ110の上方に載置された被搬送物を移動させるコンベヤ装置100において、接触駆動機構が、それぞれボールコンベヤ110の進行方向に対して直角の逆方向に駆動され、ボールコンベヤ100の進行方向に平行に設けられた1対のベルトユニット120、130からなること。
(もっと読む)
物品供給装置
【課題】高速で処理する際にも物品を所定数毎に供給コンベヤに綺麗に揃えて渡すことができる物品供給装置を提供する。
【解決手段】ロボットハンド11は、搬送コンベヤ1から搬送ベッド3に取出されて一列に整列された各物品Pを所定数単位の集合品PG毎に幅寄せする一対の幅寄せ部材を有する幅寄せ手段12と、供給コンベヤ2の各区画部10に対応して、各集合品PGの並び方向の両側を両幅寄せ部材で支持した集合品PG毎の並び間隔を拡げるように各両幅寄せ部材を調節する間隔調節手段とを備え、幅寄せ手段12と間隔調節手段により、各両幅寄せ部材の間隔を調節して、各集合品PGを所定間隔毎に配置するように拡げ、各両幅寄せ部材を供給コンベヤ2の搬送速度に同調して供給コンベヤ2に近接しつつ供給コンベヤ2の搬送方向に向けて移動することで、集合品PGを搬送ベッド3上で案内して供給コンベヤ2の各区画部10内に一括して収容する。
(もっと読む)
容器搬送装置
【課題】袋本体と首部とを有する複数の容器を整列された状態で箱詰めすることが可能な容器搬送装置を提供すること。
【解決手段】袋本体と首部とを有する容器Cを搬送する容器搬送装置Aであり、容器Cを供給する製袋機1、複数の容器Cを受け渡し位置P1まで順次搬送する入り側コンベア2、容器Cを受け渡し位置P1x方向に沿って受け渡し位置P2まで搬送する中間コンベア4、受け渡し位置P1に設置され、入り側コンベア2によって搬送されてきた容器Cを、首部がy方向の一方側および他方側のいずれかを向く姿勢に整列された所定数の容器Cごとに区分して中間搬送コンベア4へ受け渡す整列手段3、受け渡し位置P2に箱Bを順次搬送し、容器Cが詰められた箱Bを排出する出側コンベア6、第2の受け渡し位置P2に設置され、中間コンベア4により搬送されてきた所定数の容器Cを、出側コンベア6により搬送されてきた箱Bに詰める箱詰め手段5、を備える。
(もっと読む)
容器搬送装置
【課題】複数の容器を効率よく整列させ、充填率を高める容器搬送装置を提供する。
【解決手段】供給手段1から供給された所定数の容器の首部に係合して保持する、袋本体の幅よりも大きいピッチで配置された横移動可能な複数の仮置レール22からなる仮置手段2と、同じく首部に係合して容器を保持する複数の製品レール42からなる整列手段4を設け、製品レール42のピッチは仮置レール22のピッチの整数分の1であり、仮置レール22を順次横移動し整列レール42に合わせながら移載手段3A、3Bにより容器を仮置レール22から製品レール42に順次移載することにより、容器ピッチを狭めるとともに千鳥状に配列した容器群8Aを形成する。
(もっと読む)
搬送システム、搬送装置、物品、検査システム、および検査装置
【課題】物品の向きを簡易な構成で変更する。
【解決手段】装着部材20は、外周面(外周縁)に周方向における位置が互いに異なる第1領域R1と第2領域R2とを有している。ここで、第1領域R1および第2領域R2は、表面状態が異なるように形成されている。第2領域R2には、装着部材本体50の表面にインキ層51が設けられ、インキ層51の表面にクレーター状の凹凸を有したトップコート層(最外層)52が設けられている。また、第1領域R1には、容器本体50の表面にインキ層51が設けられ、インキ層51の表面に上記第2領域R2におけるトップコート層52よりも表面が平滑に形成されたトップコート層(最外層)52が設けられている。また、装着部材20の上面に設けられた装着部21を境にした一方の領域側に第1領域R1が形成され、他方の領域側に第2領域R2が形成されている。
(もっと読む)
搬送装置
【課題】包装物の搬送時における搬送姿勢を容易に転回できる搬送装置を提供することである。
【解決手段】搬送装置100は、一対のガイド機構240,241が搬送路の搬送面に設けられ、包装物110f,110gの搬送位置を規定する。また、移動機構251により一対のガイド機構240,241が搬送面上において移動される。転回装置211により包装物110a,〜,110eの長手方向を搬送方向に沿って搬送する包装物の第1姿勢および包装物110f,110gの短手方向を搬送方向に沿って搬送する包装物の第2姿勢のうち、一方から他方へまたは他方から一方へ姿勢が転回される。
(もっと読む)
物品搬送装置
【課題】 物品にダメージを与えることなく高速搬送を行うこと
【解決手段】 複数の押送フィンガー14を備えたフィンガーコンベアである第1搬送装置11と、第1搬送装置に物品を供給する供給ベルトコンベア21と、を備える。第1搬送装置の搬送方向と、供給ベルトコンベアの搬送方向のなす角は鋭角とし、物品は、搬送面内で斜めに傾斜した姿勢で第1搬送装置へ供給される。供給ベルトコンベアの搬出側外側であって、第1搬送装置の搬送方向下流側に、第1搬送装置に向けてエアを噴射する噴射ノズル31を設け、その噴射ノズルから噴射されるエアは、押送フィンガー14で搬送途中の傾斜した姿勢の物品に当たり、搬送路13に向けて付勢することで、物品が回転して搬送路上に位置する。
(もっと読む)
搬送装置
【課題】 搬送物を片側に寄せることができるとともに、袋状の搬送物に収容された内容物を平坦な状態にして嵩張りを抑えることができる搬送装置を提供すること。
【解決手段】 搬送物を所定方向に搬送するための第1搬送ベルト機構4と、第1搬送ベルト機構4の片側に配設された第2搬送ベルト機構8とを備えた搬送装置。第1搬送ベルト機構4の第1搬送ベルト10の上走行部16は、第2搬送ベルト機構8側に傾斜し、第2搬送ベルト機構8の第2搬送ベルト20の上走行部26は、第1搬送ベルト機構4側に傾斜している。更に、第1搬送ベルト10の上走行部16に関連して、振動付与手段30が設けられ、振動付与手段30は、複数の振動付与ローラ32から構成され、振動付与ローラ32により付与される振動によって、搬送中の搬送物2は、第1搬送ベルト10の上走行部16の傾斜を利用して第2搬送ベルト機構8側に少しずつ移動される。
(もっと読む)
1 - 20 / 85
[ Back to top ]