
Fターム[5J062BB08]の内容
Fターム[5J062BB08]に分類される特許
41 - 60 / 97
測量システム

【課題】GPSを使用した位置情報を取得する測量システムにおいて、マルチパス等の影響による不良データを効率よく削除することができる測量システムを提供する。
【解決手段】GPSの信号を受信する受信機と、受信信号に基づいて、受信機の緯度、経度及び高度からなる位置情報を所定の周期で算出する位置情報算出手段と、緯度、経度及び高度の位置情報のそれぞれを所定の基準位置からの相対距離情報を算出する相対距離情報算出手段と、相対距離情報算出手段によって得られた緯度方向、経度方向及び高度方向の相対距離情報を記憶する位置情報記憶手段とを備えた測量システムであって、新たに得られた高度方向の相対距離情報と、直前に得られた高度方向の相対距離情報とを比較して、相対距離の差が予め決められたしきい値より大きい場合に、新たに得られた緯度方向、経度方向及び高度方向の相対距離情報を異常と見なして削除する位置情報削除手段を備えた。
(もっと読む)
掘削機の3D集積レーザおよび無線測位誘導システム
掘削機の3D集積レーザおよび無線測位誘導システム(Ex_3D_ILRPGS)は、掘削機(14)の2D水平座標を得るよう構成された移動無線測位システム受信機(12);掘削機のブーム(36)、スティック(38)およびバケット(40)の座標を得るよう構成されたバケット−機械本体測位システム(16);少なくとも1本のレーザビーム(26)を受信するよう構成され、実質的に高い精度で局所的な垂直座標を与えるよう構成されたレーザ検出器(24);移動無線測位システム受信機によって得られた掘削機の2D水平座標と、バケット−機械本体測位システムによって得られた掘削機のブーム、スティックおよびバケットの座標と、レーザ検出器によって得られた局所的な垂直座標とを受信して統合するよう構成され、実質的に高い垂直精度で掘削機のバケットの切刃を誘導するよう構成されたオンボードナビゲーションシステム(28)を含む。 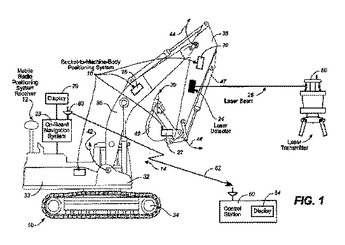 (もっと読む)
(もっと読む)
仮設構造体の健全性判定システム

【課題】GPSを利用して被測定物である仮設構造体の健全性を判定する仮設構造体の健全性判定システムを提供することにある。
【解決手段】仮設構造体の健全性判定システム10は、建設用仮設足場11に設置されたGPS受信装置15と、GPS受信装置15の受信機14がGPS衛星12から受信した観測データに基づいてGPSアンテナ13A〜13D間の基線ベクトル17A〜17Eを算出するコンピュータ16とを備えている。コンピュータ16は、基線ベクトル17A〜17Eによって画成された基準三角形22と実測三角形23との比較要素の相違点を用いて建設用仮設足場11の残留変形を測定する。
(もっと読む)
設定環境で測位するためのシステムおよび方法
本発明は全地球航法衛星システムの信号が利用できない設定環境で位置決定を提供するシステムおよび方法に関する。この点に関して、狭域の標識信号のシステムは、傍受されたエネルギーの相関関係を必要とせずに既知の拡散符号によって、物理的に有意義な観測量を導き出すスペクトル圧縮のユニットによって受信されるスペクトラム拡散CDMA信号を生成する。本発明は既に配置されている通信資産と共存することができ、設計は自己校正を可能にするので、設置と使用法が単純化される。本発明は、例えば、倉庫在庫管理、捜索救難活動、屋内環境内での資産追跡において、GNSS信号が利用できない、あるいは制限されているところでの応用に便利である。 (もっと読む)
慣性航法システムを増補するシステムおよび方法
【課題】より高い頻度で、GPS信号またはレーザ信号の一方または両方がブロックされる可能性がある期間中に、正確な位置情報およびエレベーション情報を生成できる位置監視システムを提供すること。
【解決手段】慣性航法システム(INS)を増補するシステムおよび方法は、作業機に関連する位置情報をINSから出力することと、作業機の位置情報と作業機の所望の位置との比較に基づいて作業機を調整することとを含む。INSは、INSの固有の特性によって引き起こされる可能性がある位置情報のドリフトを訂正するために、ファンレーザ、オートマティックトータルステーション(ATS)、GNSS受信器、または地上ベース無線位置決めシステムなどの1つまたは複数の位置決め(または測定)デバイスからの位置情報の関数としてカルマンフィルタによって生成される誤差推定値を使用して、周期的に再初期化される。
(もっと読む)
測位点推定装置および測位点推定方法ならびにそのプログラムと記録媒体
【課題】ある測位点における現在および未来および過去の位置情報を正確に、また容易に推定することのできる、測位点推定装置を提供する。
【解決手段】IGS点の座標を用いて基線解析によって求めた電子基準点の座標を化成し、また異なる算出時点の間隔単位あたりの電子基準点の移動速度を算出する。そして、ある算出時点に算出された複数の異なる電子基準点の電子基準点化成値とその電子基準点化成値が示す座標について算出された前記移動速度との組み合わせの情報を用いて、複数の異なる電子基準点ごとの同一時点における補正後の電子基準点化成値を算出する。また、複数の異なる電子基準点ごとの同一時点における補正後の電子基準点化成値とそれら各電子基準点における移動速度と、IGS点の座標およびその座標における移動速度とを用いて四次元統合網平均計算式により高精度な座標の推定値と新たな移動速度とを算出する。
(もっと読む)
相対位置推定システム
【課題】初期位置の情報を用いずとも初期整数値バイアスを推定可能にする相対位置推定システムを得る。
【解決手段】構造物以外の互いに異なる既知位置に設けられた基準局、構造物の互いに異なる位置に設置された受信アンテナ、受信アンテナで受信した信号をA/D変換器のサンプリング周波数に対応した周波数帯に変換するダウンコンバータ、ダウンコンバータからの受信信号をA/D変換するA/D変換器、デジタル信号にFFT変換処理を施すFFT変換器、FFT変換器からの信号の位相を追尾し各基準局からの受信信号の位相を積算すると共にレファレンスアンテナとそれ以外の受信アンテナで受信した各基準局の受信信号の位相との差を計算する位相差検出手段、基準局毎の位相差とレファレンスアンテナの位置及び基準局位置に基づきレファレンスアンテナと受信アンテナの相対ベクトルと整数値バイアスの差の初期値を算出する位置算出部を備える。
(もっと読む)
携帯機器
【課題】オブジェクトの名称を表示してユーザに報知し、所望の被写体をユーザが間違ってしまうことを防止した携帯機器を提供する。
【解決手段】制御部3は、名称を被写体の映像とともに表示する。例えば、制御部3は、山71の名称「AB山」を示す文字71Aと、山72の名称「XY山」を示す文字72Aと、山73の名称「CD山」を示す文字73Aと、を表示部7に表示する。ハイキング中、装置本体100の位置周囲に存在する被写体の名称が分からない場合、ユーザは、レンズ20をその被写体の方向に向けて、その被写体を表示部7の撮影範囲に収めれば良い。これにより、表示部7において、その被写体の名称がスルー画像中に表示される(図5参照)。よって、ユーザは、その被写体の名称を知ることができる。
(もっと読む)
フリーアクセス床下空調状態計測装置
【課題】フリーアクセス床下の空調状態を容易に正確に計測できるフリーアクセス床下空調状態計測装置を提供する。
【解決手段】空調状態計測部と無線送信部とを備えた空調状態計測ユニットと、無線受信部と電波強度測定部とを備えた3台以上の無線受信ユニットと、前記各無線受信ユニットで受信した計測データを取得するとともに各無線受信ユニットで測定した電波強度をそれぞれ取得する制御ユニットとから構成され、床上に設置した制御ユニットに接続された3台以上の無線受信ユニットを予めフリーアクセス床下に設置しておくとともに、前記制御ユニットに、前記各無線受信ユニットでそれぞれ測定した電波強度に基づいて計測データを送信した空調状態計測ユニットの設置位置を検出する送信位置検出部と、検出した空調状態計測ユニットの設置位置に対応させて計測データを表示器に表示する計測データ表示部とを設けたフリーアクセス床下空調状態計測装置である。
(もっと読む)
測位用データ生成装置、受信装置、プログラム、測位システム、及び測位方法
【課題】GPS測位における複数の受信装置と測位装置との間の通信データ量を削減する。
【解決手段】測位用データ生成装置は、GPS受信機から出力される観測データに含まれる、衛星からの電波の受信時間と、衛星を識別する衛星IDと、電波の搬送波位相の小数部とを抽出し、抽出された受信時間、衛星ID、及び搬送波位相の小数部を含んで構成される測位用データを生成する測位用データ生成部と、測位用データ生成部によって生成された測位用データを、受信時間、衛星ID、及び搬送波位相の小数部に基づいて複数のGPS受信機間の相対位置関係を測定可能な測位装置に、無線通信装置を介して送信する測位用データ送信部と、を備える。
(もっと読む)
衛星/レーザ測位システムにおいて高さ座標を正確に決定するための方法および装置
【課題】受信した衛星信号および受信したレーザ信号から位置座標を生成することが可能な衛星/レーザ測位システムにおいて信号を処理するための方法および装置を提供すること。
【解決手段】レーザ信号が利用可能である期間中は、高さ座標バイアス値がフィルタ・プロセッサによって維持される。高さ座標バイアス値は、衛星信号から導出された高さ座標とレーザ信号から導出された高さ座標との間の推定差を表す。レーザ信号が利用可能である期間中は、レーザ信号から導出された高さ座標が出力される。レーザ信号が利用できない期間中は、高さ座標バイアス値を衛星信号から導出された高さ座標に加えることによって、補正された高さ座標値が生成される。
(もっと読む)
軟弱水中地盤上の盛土の監視方法および装置
【課題】水中の軟弱地盤上に造成している盛土の安定性を容易に精度よく把握できるようにした軟弱水中地盤上の盛土の監視方法および装置を提供する。
【解決手段】軟弱水中地盤11上に造成している盛土10の頂部の沈下量Sを測定するとともに、盛土10の水中の法尻部に配置した検知指標体6をGPS受信機を備えた作業船2からナローマルチビーム測探機3により検知して盛土10の法尻部の水平方向変位量Hを測定し、測定した頂部の沈下量Sおよび法尻部の水平方向変位量Hに基づいて制御装置によって盛土10の安定性を判断するデータを演算して、予め入力してある基準データと対比する。
(もっと読む)
ダムの外部変形評価方法
【課題】地震発生の後、短時間でダムの外部変形度合いを高精度に評価できるようにした、ダムの外部変形評価方法を作成することが課題である。
【解決手段】ダムに設置された複数のGPS受信装置を用いてリアルタイムに外部変形度合いを計測し、得られた時系列計測データからCPUによりダムの変位データを算出して記憶手段に記憶すると共に、該変位データにフィルタ処理・平滑処理を行なった処理済み変位データを算出して記憶手段に記憶するようにしたダムの外部変形具合の評価方法において、地震発生信号により地震前に算出したダムの変位データにおける標準偏差σと地震後におけるダムの変位データの平均値xとを算出し、該平均値xと地震前の標準偏差σとを用い、前記CPUでZ推定により変位を算出するようにした。
(もっと読む)
室内GPSを用いて隙間埋めパッドの取付位置及び厚さを計算する方法及び装置
【課題】平面度を精密に測定し、隙間埋めパッドの取付位置及び厚さを計算するために用いられる入力データとして平面度検出結果を入力する時間を短縮し、それによって作業時間を短縮する。
【解決手段】部材に取り付けられる隙間埋めパッドの取付位置及び厚さを計算する方法であって、部材の設計中に予め計算されている平面度計測点に関する情報を統合管理サーバから受信する第1ステップと、部材上の受信した平面度測定点の各々における3次元座標を計算する第2ステップと、計算した3次元座標に基づいて、部材に取り付けられる隙間埋めパッドの取付位置及び厚さを計算する第3ステップとを含み、第2ステップが、平面度測定点の各々において部材に室内GPSセンサを接触させるステップと、部材上に設置されている別の室内GPSを用いることによって、部材と接触している室内GPSセンサの端部における3次元座標を計算するステップとを含む方法が提供される。
(もっと読む)
中空フレームの精密測定のためのグローバル座標生成方法
【課題】中空フレームの製作時に3次元座標を生成するグローバル座標生成方法を提供する。
【解決手段】本発明のグローバル座標生成方法は、中空フレームの基準面に送信機及び基準面の座標を生成するためのレファレンスセンサを設置し、レファレンスセンサで測定された位置座標から基準面のローカル座標系を生成するステップ、第1垂直面の共通地点にレファレンスセンサを設置し、その座標を測定し格納するステップ、第1垂直面に送信機及びレファレンスセンサを設置し、そのローカル座標系を生成するステップ、共通地点の座標を用いてローカル座標系をグローバル座標系に変換するステップ、他の垂直面の各ローカル座標系をグローバル座標系に変換するステップ、上部面に送信機を設置し、そのローカル座標系とグローバル座標系の関係を求めるステップ、及び前記関係からグローバル座標系を生成し適用するステップを含む。
(もっと読む)
レーザ通信装置の自動姿勢制御システム及び自動姿勢制御方法
【課題】 レーザ通信装置同士を対向するようにその姿勢を制御し、通信可能とするレーザ通信装置の自動姿勢制御システム及び自動姿勢制御方法を提供することを目的とする。
【解決手段】 レーザ通信装置1から送信されたGPSデータに基づいて、レーザ通信装置の位置情報を演算し、2つのレーザ通信装置1の位置情報に基づいて、それぞれの通信相手側のレーザ通信装置1の補正領域29を演算し、それぞれの補正領域29に複数の計測点31,32を設定し、この計測点31,32にレーザ3の光軸が向かうようにレーザ通信装置1の制御角を演算し、前記制御角においてのレーザ3のゲイン値を取得し、当該ゲイン値を角度とともに記憶し、記憶されているゲイン値の中からゲイン値が最も高いときの方位角及び仰角に姿勢を制御する。
(もっと読む)
観測装置、土地地盤変位監視システムおよびアンテナ装置
【課題】人や車両の通行を妨げたり、景観を損ねたりすることのない、観測装置および当該観測装置を用いた土地地盤変位監視システムを提供する。
【解決手段】土地地盤変位監視システム1は、高速道路15の路側帯16上の各測定点に埋め込まれた測定点観測装置10と、位置が既知である基準点に設置された基準点観測装置11と、監視装置12とから構成される。測定点観測装置10は舗装部19に固定されている。測定点観測装置10と基準点観測装置11とは、GPS衛星21からの電波を受信し、電波の搬送波の位相に関するデータ等を求める。監視装置12は、測定点観測装置10と基準点観測装置11とから受信した位相に関するデータ等から基準点に対する測定点の相対位置を求め、さらに相対位置の変化から測定点の土地地盤変位を検知する。
(もっと読む)
搬送波位相式測位装置
【課題】測位側が移動している場合であっても高精度な測位を実現できる搬送波位相式測位装置の提供。
【解決手段】移動局及び既知点で衛星信号を受信して取得する衛星データに基づいて移動局の位置を測位する搬送波位相式測位装置34であって、移動局30及び既知点20で受信した衛星信号の搬送波位相の積算値の1重又は2重位相差を観測量とし、移動局の位置と搬送波位相の積算値に含まれる整数値バイアスの1重又は2重位相差とを状態変数とするシステムモデルに、移動局の移動履歴から該移動局の現時刻の状態を予測する移動体モデルを導入して、複数エポックでの衛星データに基づいて前記状態変数を推定して測位を行う。
(もっと読む)
搬送波位相式測位装置
【課題】サイクルスリップが発生した場合であっても、整数値バイアスの確定処理を一からやり直す必要の無い搬送波位相式測位装置の提供。
【解決手段】移動局及び既知点で測定される衛星信号の搬送波位相の積算値又はその位相差を観測量とし、移動局の位置と搬送波位相の積算値に含まれる整数値バイアス又はその位相差とを状態変数とし、複数の観測周期での衛星データに基づいて前記状態変数を推定して移動局の測位を行う搬送波位相式測位装置であって、位相積算値のサイクルスリップの有無を検出するサイクルスリップ検出手段を備え、サイクルスリップが検出された場合は、サイクルスリップの検出された衛星に係る状態変数だけを初期化して測位を継続する。
(もっと読む)
測位装置及び初期化方法
【課題】移動局の動きによらず、慣性航法機器の初期化を可能にする。
【解決手段】回転レバー,移動レバーの状態により、初期化方法を選択する測位装置として、直行する3軸の角速度と加速度を出力する慣性センサ手段と、測位情報の信号により位置及び速度を出力する受信手段と、クローラを稼動させる移動レバーがオフで、クローラの上にある筐体を回転させる回転レバーがオンである場合、受信手段からの出力位置をもとに筐体の位置,方位及び姿勢を計算し、移動レバーがオンである場合、受信手段の出力位置及び速度,慣性センサ手段の出力角速度及び加速度をもとに出力角速度及び加速度のドリフト量と、位置,速度,方位及び姿勢の誤差量を計算し、ドリフト量及び誤差量だけ補正して、筐体の位置,方位及び姿勢を計算する演算手段を備える。
(もっと読む)
41 - 60 / 97
[ Back to top ]