
Fターム[5J062HH05]の内容
Fターム[5J062HH05]の下位に属するFターム
Fターム[5J062HH05]に分類される特許
121 - 140 / 352
移動体用測位装置
【課題】高度が変化する環境下においても精度良く2次元測位を行うことができる移動体用測位装置の提供。
【解決手段】衛星からの衛星電波を移動体で受信して、該移動体の位置を測位する移動体用測位装置において、移動体の姿勢に応じて変化する座標系であって、該移動体を基準とした直交座標系を定義する座標系定義手段と、前記座標系定義手段により定義された直交座標系を用いて、3個の衛星を用いた2次元測位により前記直交座標系における移動体の位置を演算する2次元測位手段とを備えることを特徴とする。
(もっと読む)
衛星航法受信機を制御するためのシステムおよび方法

【課題】処理装置およびパワーマネージメントインターフェースを含む複数の動作状態を有する衛星航法受信機を提供すること。
【解決手段】処理装置は、複数の衛星信号に基づいて、衛星航法受信機を位置付けるように動作可能であり、衛星航法受信機の速度に基づいて、それぞれ動作状態の複数の時間期間を設定するように動作可能である。処理装置と結合されているパワーマネージメントインターフェースは、その時間期間により、動作状態の間で衛星航法受信機を切り替えるように動作可能である。
(もっと読む)
無線通信装置、無線通信方法およびプログラム
【課題】無線通信装置、無線通信方法およびプログラムを提供すること。
【解決手段】段階的に送信電力を高めて無線信号を送信する送信部と、前記送信部から送信された無線信号に対する応答信号が第1の無線通信装置から受信されるようになると、当該無線信号の到達範囲と前回の無線信号の到達範囲との差分である自装置を中心とする中空円型の第1の範囲に前記第1の無線通信装置が存在すると推定する推定部と、を備える、無線通信装置。
(もっと読む)
位置情報取得システム、位置情報取得方法、移動体通信端末、及び、プログラム
【課題】位置情報の取得の際の、移動体通信端末の省電力化を図る。
【解決手段】基地局と、前記基地局を介して移動体通信を行う複数の移動体通信端末と、を含む位置情報取得システムを構成した。そして、移動体通信端末は、基地局から受信した測位タイミング情報に基づく時刻に、GPS衛星を利用したGPS測位を行い自身の自己位置情報を現在位置情報として記憶するようにした。また、移動体通信端末は、自身の近傍に存在する他の移動体通信端末から当該他の移動体通信端末の有する位置情報を他者位置情報として受信するようにした。さらに、移動体通信端末は、前記現在位置情報と前記他者位置情報から信頼度のより高いものを選択して当該時点における自身の現在位置情報とする、ようにした。
(もっと読む)
測位システム、測位方法及び測位プログラム
【課題】 より短い時間で受信機の状態に応じた測位結果を得る。
【解決手段】 測位サーバ10は、GPS測位に用いられる信号の受信機能を有するセルラ端末20の位置を推定する測位システムである。測位サーバ10は、セルラ端末20に係る環境を示す情報を取得する環境情報取得部14と、環境を示す情報に基づいて、GPS測位の有効性を推定する有効性推定部15と、推定された有効性に基づいて、セルラ端末20のGPS測位の実行を制御するGPS測位制御部16と、を備える。
(もっと読む)
ロバストなロケーション推定
位置の信頼できる推定を補足するために情報を収集する方法が提供される。方法は、第1の位置の信頼できる推定を導き出すのに十分な第1の情報を受信するステップと、第1の位置の付近の第2の位置の補足の推定が要求されうることを示す指示を受信するステップと、指示に応答して、第1の位置の付近の観測可能な少なくとも1つの地上無線ソースの識別を備える情報を検知することと、検知された情報を第1の位置に関連して格納するステップとを備える。方法は、第1の位置の信頼できる推定が、続いて少なくとも1つの無線ソースが観測可能である任意の前記第2の位置を推定するために使用されるようにすることができる。 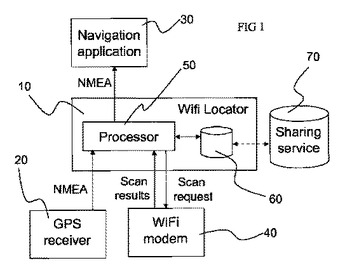 (もっと読む)
(もっと読む)
無線システムにおけるジオフェンスの動的創出の方法
ジオフェンスデバイスによって受け取られた疑似距離測定値の第1の集合を使用して即時参照点を決定すること、即時参照点へ参照される動的ジオフェンス区域を規定すること、疑似距離測定値の第2の集合を使用して測位を決定すること、及び測位を動的ジオフェンス区域と比較することによって、動的ジオフェンス区域を創出する方法及び装置。1つの態様において、比較結果に基づく警報メッセージがユーザへ提示される。 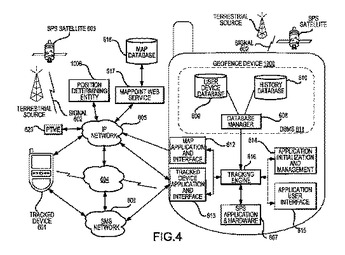 (もっと読む)
(もっと読む)
現在位置推定装置、方法及びシステム
【課題】登山等において、GPSシステムによる衛星からの電波を受信できない場合があっても、それまでの位置情報に基づいて現在位置を推定することができる装置を提供すること。
【解決手段】現在位置推定装置10は、地図情報DB33と気圧高度換算DB32とを有し、GPSシステムから受信したデータに基づく位置データと、気圧計91から取得した気圧データと、を対応付けて時系列に測定ログDB31に記録する。そして、測定ログDB31にそれまでに記録した気圧データと、新たに取得した気圧データと、に基づいて気圧高度換算DB32を参照して現在の高度を推定し、推定した当該高度と、測定ログDB31にそれまでに記録した位置データと、地図情報DB33に記憶した地形データと、に基づいて現在位置を推定する。
(もっと読む)
昇降機の保守管理システム
【課題】地図上で各物件の位置と共に、その周辺に存在する保守員の位置を正確に把握する。
【解決手段】エレベータの監視センタに設置されたサーバ31は、物件データベース43aと地図データベース43cを用いて、指定地域の地図に各物件のマークを付してオペレータの端末装置に表示する。ここで、サーバ31は、GPSを利用して検出された保守員の位置に保守員マークを表示すると共に、保守員が各物件の中に入った場合には当該物件の位置を基準にして検出位置を補正し、その補正後の位置に保守員マークを移動する。
(もっと読む)
追跡方法
【課題】従来技術の欠点を克服できる追跡方法を提供すること。
【解決手段】追跡方法は、対象デバイス(1)が自分の位置情報を取得できるようにするステップと、対象デバイス(1)が、対象デバイス(1)により取得された位置情報と、ウェブサイト上の電子地図を含むウェブページの位置とを含むURLを生成できるようにするステップとを含む。電子地図を含むウェブページは、電子地図と、電子地図上における対象デバイス(1)の位置の表示とを含む。
(もっと読む)
地理的位置の現在の測定値を地図対象物に割り当てるための装置および方法
地理的位置の現在の測定値12−nを、地理的地図の地図対象物14に割り当てるための装置20。処理装置22は、現在の測定値12−nが、第1の地図対象物14−1に割り当てられるかどうかを指示する、第1の確率測度P1を決定し、かつ、仮に、第1の確率測度P1が、第1の地図対象物14−1への現在の測定値12−nの割り当てがありそうもないことを示すならば、現在の測定値12−nが、第2の地図対象物14−2に割り当てられるかどうかを指示する、第2の確率測度P2を決定する。現在の測定値12−nは、隣接地理的位置の一連の隣接測定値から発生する。一連の隣接測定値のうち、少なくとも1つの隣接測定値は、事前に既に、第1の地図対象物14−1に割り当てられている。第2の地図対象物14−2は、第1の地図対象物14−1との交差点を有している。 (もっと読む)
携帯端末、ナビゲーション方法、及びナビゲーション用プログラム
【課題】携帯端末の位置測定の精度を維持しつつ、携帯端末を用いたナビゲーションを行う場合の消費電力を低減できるようにする。
【解決手段】本発明による携帯端末は、ナビゲーション機能を有する携帯端末であって、GPS信号に基づいて当該携帯端末の位置を測定するGPS測定部と、加速度センサの検出結果に基づく当該携帯端末のユーザの歩数に基づいて、当該携帯端末の移動距離を算出する移動距離算出手段と、前記移動距離算出手段が算出した移動距離に基づいて、当該携帯端末がガイドポイントに到達したか否かを判定するガイドポイント判定手段と、ガイドポイント判定手段がガイドポイントに到達したと判定したことに基づいて、前記GPS測定部の電源をオン状態に制御するGPS測定部制御手段とを備えたことを特徴とする。
(もっと読む)
ナビゲーション装置、ナビゲーション方法及びナビゲーションプログラム
【課題】移動体が傾斜のある場所を移動している際にも、加速度センサの出力に含まれるセンサ固有の誤差の補正が可能で精度よく移動体の現在位置を算出することが可能なナビゲーション装置を提供する。
【解決手段】所定時刻taのGPS速度Vg(ta)と時刻taから算出間隔経過後の時刻tbのGPS速度Vg(tb)の差分が許容値より小さいことにより移動体が等速度であると判定し、前回等速度と判定した時刻t1の加速度センサの出力値である加速度Axの平均値Ax1と、今回等速度と判定した時刻t2の加速度Axの平均値Ax2が一致することにより、時刻t1と時刻t2に移動体が移動する斜面の傾斜角θが同一として前記傾斜角θを求め、前記傾斜角θを用いて加速度センサの誤差αを補正値として算出し、加速度センサの出力を前記補正値により補正した値を用いて、移動体の現在位置を算出する。
(もっと読む)
ナビゲーション装置及びエフェメリスデータ取得方法
【課題】本発明は、煩雑な操作をユーザに強いることなく、有効なエフェメリスデータを常時保持した状態で現在位置を短時間でかつ正確に測位できるようにする。
【解決手段】本発明は、GPS衛星から衛星信号S1を受信して復調することによりエフェメリスデータS2を取得し、当該エフェメリスデータS2を記憶しておき、当該エフェメリスデータS2の有効時間を当該エフェメリスデータS2の取得タイミングから計時し、エフェメリスデータS2の有効時間が経過する前に、新たなエフェメリスデータS2を再取得させることにより、現在位置を測位するまでの所要時間が最も短いホットスタートを常に行なうことができる。
(もっと読む)
位置測位端末、位置測位方法及び位置測位システム
【課題】ネットワークからアシストデータを取得できない場合においても位置測位が可能な位置測位端末を提供する。
【解決手段】位置測位端末101は、複数の航法メッセージからなるアシストデータを含む放送波108を受信する。アシストデータ取得部107は、受信された放送波108からアシストデータを取得する。位置測位部209は、取得されたアシストデータを利用して位置測位を行うとを含む。放送波アシストデータ認識部212は、放送波受信部205により受信された放送波にアシストデータが含まれているか否かを判断する。放送波にアシストデータが含まれていると判断された場合、位置測位端末101は、放送波からアシストデータを取得する。
(もっと読む)
位置標定装置、位置標定システム、位置標定システムのユーザインタフェース装置、位置標定システムの標定サーバ装置および位置標定方法
【課題】車両が走行した位置を高精度に測位する。
【解決手段】位置姿勢標定装置100は、走行中の車両で取得された観測データ201、画像データ203およびレーザデータ205と予め位置が測量されている地物位置データ204とに基づいて車両の位置姿勢を標定する。地物DB検索GUI部120は、ユーザが指定した画像データ203を表示画像として表示し、地物位置データ204に基づいて撮像地域の地図を表示する。ユーザはランドマークが映っている画素とその地図表記とを指定する。三次元点群投影検索部140はレーザデータ205に基づく三次元点群モデル206を表示画像に投影し、指定画素に最も近い投影点を特定する。地物車両位置差分演算部150は投影点に対応するレーザデータ205を取得する。そして、車両位置姿勢標定部160はランドマークの既知座標とレーザデータ205が示す距離方位とに基づいて車両の位置を標定する。
(もっと読む)
情報処理装置、プログラム、情報処理方法、および情報処理システム
【課題】情報処理装置、プログラム、情報処理方法、および情報処理システムを提供すること。
【解決手段】建造物における一区画を示す区画情報、前記一区画に存在する無線端末における周囲の基地局から送信された無線信号の信号強度測定により取得される第1の測定情報、および前記基地局を識別する基地局識別情報、を対応付けて記憶している記憶部224と、任意の無線端末から、該無線端末における無線信号の信号強度測定により取得された第2の測定情報と、前記無線信号の送信元の基地局を示し、前記第2の測定情報の各々と対応付けられた基地局識別情報とを受信する受信部と、前記受信部により受信された前記基地局識別情報と対応付けられている第1の測定情報、および前記受信部により受信された前記第2の測定情報に基づいて、前記第1の測定情報のいずれかに対応付けられている区画情報を選択する選択部と、を備える情報処理装置。
(もっと読む)
信号源位置推定方法
【課題】無線を使う地上移動通信において、マルチビームアンテナの利用により信号源または干渉源の位置を特定する。
【解決手段】インパルスレスポンスに示される各パスについて、予め取得した各ビームの組のアンテナ利得の差と方位角とが一対一に対応付けられたデータを参照して、前記検出したビームの組のアンテナ利得の差に対応する方位角を推定するステップと、地形情報、並びに建物の位置および形状を少なくとも示す建物情報を含む地図情報を取得し、前記位置推定局の位置を基準とし、少なくとも2つのパスの方位角並びに電波の伝達速度に基づいて、前記地図上に前記各パスに対応する到来予測経路線を前記相対遅延時間が大きい順序で描画するステップと、前記地図上で、すべての前記パスの到来予測経路線が同一時刻で交差する位置を判定するステップと、を少なくとも含む。
(もっと読む)
保護者管理システム
【課題】通信に係わる構成を複雑化することなく、被保護者の迷子・離脱防止を図る。
【解決手段】保護者管理システム1は、保護者P1とともに所定の移動可能領域を移動可能な移動局タグT1と、被保護者P2,P3とともに移動可能な移動局タグT2,T3と、リーダアンテナ12を備えた固定局リーダR1〜4とを有し、移動局タグT1〜T3から送信され固定局リーダR1〜4で受信した電波信号に基づき、移動局タグTの位置検出を行い、その位置検出結果に基づき、移動局タグT1と移動局タグT2,T3との間の距離を検出し、検出された距離が、所定の警報距離以上であるか否かを判定し、判定が満たされた場合、対応する警報指示信号を生成し出力する。移動局タグT1は、警報指示信号に応じて、対応する警報表示を行うとともに移動局タグTの位置を地図上において表示する表示部DPを備える。
(もっと読む)
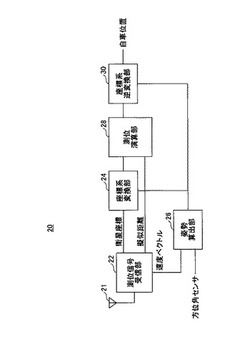
測位方法、プログラム及び測位装置
【課題】慣性航法用センサの検出結果に含まれる誤差を補正するための新たな手法を提案
し、より正確な現在位置の測位を実現すること。
【解決手段】カーナビゲーション装置1において、カーナビ用ジャイロセンサ61の検出
結果を積分することで、地球に対する慣性航法用センサ60の絶対姿勢の推定値である推
定絶対姿勢が算出される。そして、移動体座標系と基準座標系との座標変換行列が推定絶
対姿勢に基づいて算出され、当該座標変換行列を用いて、カーナビ用加速度センサ63の
検出結果が基準座標系に変換されるとともに、重力加速度の成分が減算されることで、基
準座標系における自動車の移動ベクトルが算出される。そして、この移動ベクトルを用い
て現在位置が測位される。
(もっと読む)
121 - 140 / 352
[ Back to top ]