
Fターム[5J070AF03]の内容
レーダ方式及びその細部 (42,132) | レーダの設置 (3,019) | 移動体設置 (2,312) | 自動車 (1,473)
Fターム[5J070AF03]の下位に属するFターム
無人車 (16)
Fターム[5J070AF03]に分類される特許
181 - 200 / 1,457
フェーズドアレイレーダ装置およびこれを備えた車両
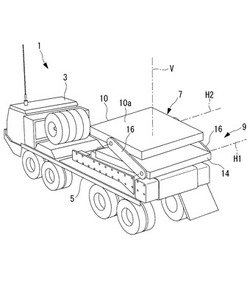
【課題】1台のフェーズドアレイアンテナによって方位角方向だけでなく仰角方向の捜索ないし追尾が可能とされたフェーズドアレイレーダ装置を提供する。
【解決手段】複数の素子アンテナが平面上に並べられて配置され、各素子アンテナから送受信される電波の位相量を変化させて所望方向の目標物を捜索ないし追尾する1台のフェーズドアレイアンテナ本体7と、方位角方向および仰角方向にフェーズドアレイアンテナ本体7の姿勢を制御する姿勢制御手段9とを備えている。姿勢制御手段9は、鉛直軸線V回りに回転する回転台14と、下端が回転台14に対して第1水平軸線H1回りに回動自由に接続されると共に、他端がフェーズドアレイアンテナ本体7に対して第2水平軸線H2回りに回動自由に接続されたリンク16とを備えている。
(もっと読む)
車載レーダ装置

【課題】付着物検知手段で、レドームの付着物が検出された場合に、付着物が一時的にレドームに付着している状態か、定常的にレドームに付着している状態かを判別する車載レーダ装置を得る。
【解決手段】付着物検知手段16はレドーム6の付着物7による反射波の時間的変動を検出するレドーム反射変動検出部を備え、付着物検出手段16によりレドーム6の付着物7が検出された場合に、レドーム反射変動検出部により、レドーム6の付着物7による反射波の時間的変動が大きいときは、レドーム6に一時的に付着物7が付着したと判断し、レドーム6の付着物7による反射波の変動が小さいときは、レドーム6に定常的に付着物7が付着したと判断する。
(もっと読む)
衝突予測装置
【課題】自車の前方に検出されたターゲットの自車に対する相対位置に応じて、当該ターゲットが自車の左側を通過するか、または右側を通過するかを予測し、自車とターゲットとの衝突可能性を適切に推定する衝突予測装置を提供する。
【解決手段】本発明の衝突予測装置は、自車の前方にターゲットを検出するターゲット検出手段と、ターゲットの自車に対する相対位置を算出する相対位置算出手段と、当該相対位置に基づいて、ターゲットが、自車の左側を通過するか、または右側を通過するかを示す通過予測情報を設定する通過予測情報設定手段と、相対位置の変化を監視する相対位置監視手段と、相対位置の変化に基づいて、通過予測情報設定手段によって設定された通過予測情報を変更する通過予測情報変更手段と、通過予測情報に基づいて、自車とターゲットとの衝突可能性を推定する衝突可能性推定手段とを備える。
(もっと読む)
レーダ装置及び目標探知方法
【課題】被探知目標を正確に探知する開口合成技術を実現する。
【解決手段】レーダ装置は、複数の受信アンテナで受信された各エコー信号から生成された各ベースバンド信号に対して、等しい空間位相を与える送信アンテナ及び受信アンテナの組み合わせから得られる各ベースバンド信号を基準として開口合成を適用することにより、合成ベースバンド信号ベクトルを生成する信号合成部と、複数の送信アンテナのアレイ多項式と複数の受信アンテナのアレイ多項式との積から得られる合成アレイ多項式の各項の係数を用いることにより補正データを取得する補正データ取得部と、この補正データを用いて当該合成ベースバンド信号ベクトルを補正する補正部と、この補正部により補正された合成ベースバンド信号ベクトルを用いることにより角度推定を行う推定部と、を備える。
(もっと読む)
広帯域パルスレーダの距離計測方法
【課題】精度の高い距離計測が可能な広帯域パルスレーダの距離計測方法を提供する。
【解決手段】広帯域パルスレーダ信号の目標物からの反射波受信信号に対して各々異なる基底関数を使用する複数のウェーブレット変換を行なって各々ピーク値を算出する(ステップ23A,23B)。算出されたピーク値に補正を行ない(ステップ24)、この補正されたピーク値に基づいて距離算出を行なう。
(もっと読む)
移動体周辺監視システム
【課題】送信波を放射することにより障害物を検知する複数の検知センサを備えた移動体周辺監視システムにおいて、各検知センサ間の干渉を抑制し、検知精度の向上を図る。
【解決手段】各検知センサ2は、信号源20の発振周波数を掃引する周波数制御回路21と、上記発振周波数と同じ周波数の送信波を放射する送受信回路22と、電源制御回路24とを備える。電源制御回路24は、上記発振周波数が掃引される期間だけ、上記送信出力をオンし、他の期間は、上記送信出力をオフする。従って、いずれかの検知センサ2で上記発振周波数が掃引され上記送信出力がオンであるときに、他の検知センサ2で上記発振周波数が掃引されていなければ、他の検知センサの上記送信出力はオフされている。このため、各検知センサ2の送信波又は反射波と他の検知センサの送信波又は反射波との間の干渉の発生を防ぐことができ、検知センサ2の検知精度の向上を図ることができる。
(もっと読む)
先行車検出装置
【課題】従来に比して正確に先行車の位置を検出可能な先行車検出装置を提供する。
【解決手段】自車両の前方を走行する先行車の位置を検出する先行車検出装置であって、少なくとも先行車の左右方向の位置情報を検出する先行車位置検出手段と、現時点において検出した位置情報を補正するフィルタ補正手段と、先行車の走行状態を推定する先行車走行状態推定手段と、フィルタ補正手段による補正の度合いを、先行車走行状態推定手段によって推定された先行車の走行状態に応じて変更するフィルタ制御手段とを備える先行車検出装置である。
(もっと読む)
車載用レーダ装置及び車載用レーダシステム
【課題】多周波変調異常を検出する機能を有する車載用レーダ装置を提供する。
【解決手段】2周波CW変調処理部101のように、送受信信号のIF信号に位相差が発生するような変調処理方式と、FM変調処理部102のように、送受信信号から得られるドップラ周波数がターゲット距離に応じて変動するような特性を持つ変調方式を有し、前記位相差から算出されるターゲット距離と、前記ドップラ周波数の変動量から算出されるターゲット距離の差分が所定値以上になった場合、多周波変調処理が異常であると判断することができる。
(もっと読む)
移動体周辺監視システム
【課題】複数の距離測定センサを備えた移動体周辺監視システムにおいて、各距離測定セ
ンサにより高精度に障害物までの距離を測定し、しかも、製造コストを低減する。
【解決手段】移動体周辺監視システムにおいて、センサ制御装置は、各距離測定センサに
よる距離測定範囲に対応した周波数掃引幅の掃引パターンを記憶している。センサ制御装
置は、各距離測定センサに、その取付位置に応じて距離測定範囲を設定し、その距離測定
範囲に対応する周波数掃引幅の掃引パターンP1、P2、P3に従ってセンサ内の信号源
の発振周波数を掃引させる。これにより、各距離測定センサの取付位置に応じた夫々の距
離測定範囲で各距離測定センサにより高精度に距離を測定することができる。しかも、上
記掃引パターンはセンサ制御装置が記憶しているので、各距離測定センサはその構成を共
通化することができる。
(もっと読む)
車両の周辺監視装置
【課題】レーダデータと赤外線カメラデータの同期ずれを補正する。
【解決手段】車両の周辺の物体を検出するレーダと、車両の周辺の画像を撮像するカメラと、を備える車両周辺監視装置において、レーダが検出した物体の位置に対応する、カメラが撮像した対応画像上の所定領域を特定して当該所定領域内の前記物体を特定する手段とを備え、特定された対応画像上の所定領域の移動量の時間変化と、カメラが撮像した画像上での所定物体の移動量の時間変化との位相ずれ量を算出する手段と、位相ずれ量がゼロになるように、レーダまたはカメラの出力信号の位相補正をおこなう位相補正手段と、を有する。
(もっと読む)
車載レーダ装置の取り付け角度調整のための支援装置及び車載レーダ装置の取り付け角度調整方法
【課題】車載レーダ装置の取り付け角度調整のための支援装置であって、高い精度で軸調整を行う。
【解決手段】レーザ装置2と、ターゲット面30a,30bを含む被照射部材3a,3bと、を備えており、前記被照射部材3a,3bは、車両の左右方向の少なくとも一方に配置され、前記レーザ装置2は、放射したレーザ光が前記被照射部材3a,3bのターゲット面30a,30bに照射されるように前記車載レーダ装置100に取り付けられていることを特徴とする、車載レーダ装置100の取り付け角度調整のための支援装置及びこれを用いた方法が提供される。
(もっと読む)
区画線検出装置および区画線検出方法
【課題】電磁波を送受信した結果に基づき区画線の検出を行う装置において、検出精度を向上させる。
【解決手段】近距離スキャンの1ライン分の測定データ(強度データ,距離データ,スキャン角度)を読み込み、読み込んだ強度データ列および距離データ列のそれぞれを微分することで、微分強度データ列および微分距離データ列を求める(S110〜S120)。微分強度データ列において正レベル,負レベルが連続し且つヌルレベルに挟まれた領域を候補範囲として抽出し(S130)、その抽出した候補範囲の中から、微分距離データ列の極性が、候補範囲に対応する部位で正,負,正(第1スキャン領域の場合)、又は負,正,負(第1スキャン領域の場合)と変化するものを、区画線からの反射が得られた対象領域として抽出する(S140)。
(もっと読む)
車載レーダシステム
【課題】ノイズ環境に応じた適切なノイズ対応処理を実施し、物体の誤検出を防止しつつレーダ性能を確保する。
【解決手段】ノイズ源200を中心とする円形の領域を設定し、この円形の領域を、比較的マルチパスの少ない領域R1と、マルチパスの発生が多く、自車両100のレーダ性能に重度の影響が予想される領域R2とに区分する。そして、測位装置からの測位情報により、自車両100の現在位置が領域R1内にあるとき、車載レーダ装置の受信信号のサンプリング間隔と送信電力との少なくとも一方を自車両100の進行方向に応じて変更し、自車両100が領域R2内に進入したときには、ノイズ源の出力の規則性に基づいて受信信号を取得する処理を行う。これにより、ノイズ環境に応じた適切なノイズ対応処理を実施するので、ノイズ環境下においても物体の誤検出を防止しつつレーダ性能を確保することができる。
(もっと読む)
障害物検出装置
【課題】低コストで障害物の存在方向を検出可能な障害物検出装置を提供する。
【解決手段】車両の周辺に周波数変調を施したシングルビームの検知波信号を照射し、当該検知波信号が障害物から反射されて成る反射波信号に応じたビート信号を取得するFM−CW方式のレーダー装置と、車両が所定距離移動する毎にレーダー装置において受信したビート信号を記憶する記憶手段と、記憶装置に記憶された反射波信号を、当該ビート信号を受信した各時点から現時点までの車両の移動距離に応じた位相だけ各々シフトさせる位相シフト手段と、位相シフト手段によりシフトされたビート信号を、複数のアンテナ素子において同時に受信した反射波信号とみなしてディジタルビームフォーミング処理することによって障害物の存在方向を算出するビーム合成手段とを備えることを特徴とする障害物検出装置である。
(もっと読む)
先行車位置判定装置
【課題】GPSによる相対距離および相対速度等の位置情報と、自律センサによる位置情報とを比較して先行車両を特定する際に、複数の他車両が存在する場合はGPSによる位置情報の誤差に応じて比較の閾値を変化させることで、より厳密に先行車を特定することができる先行車位置判定装置を提供することを課題とする。
【解決手段】ECUは、自車両と当該自車両前方を走行する他車両との相対位置に関する相対位置情報、および、当該相対位置の誤差に関する誤差情報を取得し、自車両の直前を走行する先行車の位置を検出し、取得された相対位置情報に基づく相対位置と、検出された位置とを比較して先行車の位置を特定し、複数の他車両の相対位置情報が取得された場合、取得された相対位置情報に基づく相対位置と、検出された位置とを、誤差情報に応じて変化させた閾値を用いて比較して先行車の位置を特定する。
(もっと読む)
障害物検出装置
【課題】低コストで障害物の存在方向を検出可能とする障害物検出装置を提供する。
【解決手段】車両に搭載され、当該車両周囲の障害物を検出する障害物検出装置であって、車両の周辺に検出波を照射し、当該車両の周辺に存在する障害物から反射された反射波に基づいて当該障害物までの距離を検出する距離検出手段と時刻t1において距離検出手段から取得した障害物までの距離を第1の距離とし、時刻t1から所定時間経過後の時刻t2おいて距離検出手段から取得した障害物までの距離を第2の距離として、当該第1の距離および当該第2の距離の差分値に基づいて当該障害物の存在方向を算出する方向算出手段とを備える障害物検出装置である。
(もっと読む)
障害物検出装置
【課題】低コストで障害物の存在方向を検出可能な障害物検出装置を提供する。
【解決手段】車両に搭載され、当該車両周囲の障害物を検出する障害物検出装置であって、車両の周辺に検出波を照射し、当該車両の周辺に存在する障害物から反射された反射波に基づいて当該障害物までの距離、当該物体と車両との相対速度、および当該反射波の位相を検出するレーダー装置と、異なる第1の時点、および第2の時点においてレーダーによって検出された障害物が同一であるか否かを、当該第1の時点および第2の時点各々において検出された距離および相対速度に基づいて判定する同一性判定手段と、第1の時点および第2の時点において検出された障害物の存在方向を、当該第1の時点および第2の時点各々において検出された位相に基づいて算出する方向算出手段とを備える、障害物検出装置である。
(もっと読む)
物体認識装置
【課題】物体を精度よく検出する物体認識装置を提供する。
【解決手段】同じ探索領域に含まれる測距データ同士を一体化して物標データを生成し、物体認識を行うが、この探索領域のY方向(車両進行方向)については、サンプリング周期の間に自車が移動する距離を基準として設定されている。道路に沿った方向(進行方向)に長く延びた、あるいは当該方向に並んだ物標が同一物体とみなされるため、ガードレール等の路側物と先行車とを正しく区別できる。X方向(車幅方向)の長さは、隣接する水平ビーム1本〜2本に相当する長さに設定されている。車幅方向において物体自体が離れていれば、それら別の物体の測距データが一体化されることがなくなる。つまり、先行車と路側物はもちろん、先行車同士であっても、誤って一体化されることなく、正しく区別できる。
(もっと読む)
レーダ装置及びコンピュータプログラム
【課題】側方対象物の誤検知を防ぐことができるレーダ装置を提供する。
【解決手段】電波を送信する送信アンテナ14と、送信された電波が対象物により反射された電波を受信する複数の受信アンテナ15と、受信アンテナ15で受信された各受信信号と送信アンテナ14で送信した送信信号とを混合して受信アンテナ15毎にビート信号を生成するビート信号生成部と、各ビート信号の信号強度に、受信アンテナ15毎に関係付けられた所定の重みをかけ、ビート信号の信号強度を変更する重み付け処理部17と、重み付け処理部17により信号強度が変更されたビート信号に基づいて、対象物の方位を検出する方位検出部19と、を備える。
(もっと読む)
前方環境認識装置、およびそれを備えた車両誘導システム
【課題】ゲート手前に車両が並んでいる場合であっても、自車両前方の物標情報を検出して、ゲートを認識することが可能な前方環境認識装置、およびそれを備えた車両誘導システムを提供する。
【解決手段】検出された物標Pの情報に基づいて、物標Pの平面分布形状Hを算出する。前方環境認識装置1は、平面分布形状Hから、自車両側へ突出する山型分布形状Y1〜Y3を判別し、判別された山型分布形状Y1〜Y3に対応する位置に障害物C1〜C3が存在するゲートG1〜G3が有ると認識する。これにより、ゲートG1〜G3の手前に他車両C1〜C3などの障害物が存在する場合であっても、自車両前方の物標Pの情報を検出して、ゲートG1〜G3を認識することができる。
(もっと読む)
181 - 200 / 1,457
[ Back to top ]