
Fターム[5J070AF03]の内容
レーダ方式及びその細部 (42,132) | レーダの設置 (3,019) | 移動体設置 (2,312) | 自動車 (1,473)
Fターム[5J070AF03]の下位に属するFターム
無人車 (16)
Fターム[5J070AF03]に分類される特許
21 - 40 / 1,457
レーダ装置
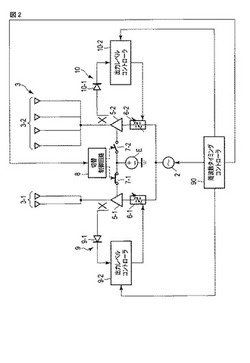
【課題】アンテナに供給する高周波信号が減衰せず、かつ高周波信号のリークも生じることがないこと。
【解決手段】レーダ装置は、対象物を検出するための各ビームをそれぞれ送信する複数のアンテナと、複数のアンテナから各ビームを送信するための複数のモードの高周波信号を切り替えて発振する発振器と、発振器により発振された各モードの高周波信号をそれぞれ増幅して対応する複数のアンテナにそれぞれ供給する複数の増幅器と、複数の増幅器の各入力側にそれぞれ接続された複数の可変減衰器と、発振器により発振される各モードに応じて複数の増幅器の動作をそれぞれオン又はオフに切り替えると共に、複数の可変減衰器の減衰量をそれぞれ制御する切替制御回路とを具備する。
(もっと読む)
レーダ装置およびレーダ装置の性能低下判定方法

【課題】短時間で高精度な性能低下判定処理を実現することができるレーダ装置およびレーダ装置の性能低下判定方法を得る。
【解決手段】レーダ装置1の検知性能に関する性能低下判定処理を実施する性能低下判定部50は、測定部40で得られた測定結果を加工して、加工済反射物体を生成する測定結果加工部51と、相対距離の範囲と方位角度の範囲とによって形成されるエリア毎に、加工済反射物体の反射波レベルの代表値を計算し、エリア毎反射波レベル代表値を算出するエリア毎反射波レベル代表値計算部52と、エリア毎に、エリア毎反射波レベル代表値とエリア毎反射波レベル代表値閾値とを比較して、エリア毎性能低下度を算出するエリア毎性能低下度計算部53と、各エリアについて、エリア毎性能低下度を組み合わせて性能低下判定結果を出力するエリア毎性能低下度組合せ判定部54とを有する。
(もっと読む)
探知測距装置および探知測距方法
【課題】複数の送信素子および複数の受信素子を有する探知測距装置の処理時間の短縮と回路の簡略化とを図る。
【解決手段】探知測距装置は、互いに異なるキャリア周波数を有するM個のプローブ信号を生成する信号生成回路と、M個のプローブ信号を送信するM個の送信素子と、ターゲットからのエコー信号を受信するN個の受信素子と、N個の受信素子のそれぞれに対して設けられ、M個のプローブ信号の中の少なくとも1つを用いて、各々の受信素子で受信されたエコー信号を復調することによって復調エコー信号を生成し、復調エコー信号を周波数領域でフィルタリングしてM個のプローブ信号に対応するM組のデータ信号を生成するN個の復調回路と、N個の復調回路によって生成されるM×N組のデータ信号に基づいてターゲットを探知する信号処理部と、を有する。
(もっと読む)
物体検出装置および車両制御装置
【課題】自車に対する先々行車を正確に検出することができる物体検出装置の提供。
【解決手段】レーダ波の送出により、上記自車に対する上記物体の左右方向角度および上下方向角度、並びに上記自車から上記物体までの距離を含むレーダ情報を取得するレーダ情報取得手段と、上記レーダ情報に基づいて物体を認識する物体認識手段とを備え、上記レーダ情報取得手段によって左右方向が同一で上記自車からの距離が異なる複数の上記レーダ情報が取得され、かつ、当該複数のレーダ情報のうち上記自車から最も近い物体以外の他の物体の上記上下方向角度または当該角度に基づく上下方向位置が予め定められた条件を満たす場合、上記物体認識手段は、上記他の物体のうち上記条件を満たす物体が上記自車から最も近い物体の向こう側に上記自車の走行の障害となり得る物体として存在すると判断する。
(もっと読む)
物体検出装置
【課題】歩行者のようなレーダの送信信号に対する低反射物体であってもレーダにより確実に検出することができる物体検出装置を提供する。
【解決手段】車両に搭載されたカメラ100によって撮像された画像に基づいて物体40の種類を判定する物体種類判定部102と、車両に搭載された電磁波を送信するレーダ20の受信信号に基づいて物体40に関する情報を検出するレーダ物体検出部211と、前記レーダ20を制御するレーダ制御部200とを備え、レーダ制御部200は、物体種類判定部102が判定した物体40の種類に応じて、レーダ20の距離分解能と、速度分解能と、角度分解能と、送信電力と、受信ゲインと、送信アンテナの種類の切り替えと、のうちの少なくとも一つを制御する。
(もっと読む)
レーダ装置
【課題】本発明は、レーダ装置に係り、対象物として実際に高さを有する立体物と見かけ上高さを有する非立体物とを区別することにある。
【解決手段】電波を送信する送信手段と、送信手段から送信される電波の反射波を受信する受信手段と、を備え、受信手段に受信される反射波に基づいて対象物を検知するレーダ装置は、受信手段に受信される反射波に基づいて、対象物の基準位置に対する相対高さを検出する高さ検出手段と、高さ検出手段により検出される相対高さの、距離又は時間に対する変動に基づいて、該対象物が絶対的な高さを有する立体物であるかを判定する立体物判定手段と、を備える。
(もっと読む)
レーダ装置
【課題】車両の遠方にいる歩行者等の物体、および、車両に近接した歩行者等物体の双方を高感度で検出できるレーダ装置を提供すること。
【解決手段】レーダ装置は、仰角面内において水平方向への指向性を有する指向性ビームを放射する水平用送受信アンテナと、水平より上方である所定の方向への指向性を有する指向性ビームとを放射する高仰角用送受信アンテナとを備える。また、レーダ装置は、指向性ビームを放射するアンテナを水平用送受信アンテナおよび高仰角用送受信アンテナのいずれか一方に切り替えるための切替手段を備える。
(もっと読む)
移動物体検出装置、移動物体検出方法及び移動物体検出用コンピュータプログラム
【課題】レーダの検知範囲内に存在する静止物体を移動物体として誤検出することを抑制可能な移動物体検出装置を提供する。
【解決手段】移動物体検出装置(1)は、レーダ(2)から、そのレーダからの距離とその距離に位置する物体により反射されたレーダ波の強度を表す受信レベル信号との組を少なくとも一つ含む計測データを受信するインターフェース部(11)と、複数の計測データのそれぞれから第1の閾値以上となる受信レベル信号を検出し、レーダからの距離ごとに、第1の閾値以上となる受信レベル信号の出現頻度を表す背景値を求める背景データ更新部(21)と、計測データ中で第1の閾値よりも高い第2の閾値以上の強度を持つ受信レベル信号に対応する距離にある物体のうちで、背景値が静止物体に相当する値より小さい距離にある物体を移動物体として検出する移動物体検知部(22)とを有する。
(もっと読む)
ドップラ式速度計
【課題】ドップラ効果を利用して速度を計測するドップラ式速度計において正確な速度を得る。
【解決手段】所定周波数の送信波を送信する送信手段110と、送信波の反射波を受信する受信手段120と、反射波に基づくドップラ信号の周波数スペクトルを検出するスペクトル検出手段141と、を備え、検出した周波数スペクトルを用いて速度を計測するドップラ式速度計1であって、速度に対するドップラ信号の基準周波数スペクトルと検出した周波数スペクトルとの相関から基準周波数スペクトルを特定するスペクトル特定手段142と、特定した基準周波数スペクトルに対応する速度を反射波に基づいて検出した速度として出力する速度出力手段143と、を備える。
(もっと読む)
データ解析装置、レーダ装置、およびデータ解析方法
【課題】サンプリング値に対するデータ解析を行うデータ解析装置において、サンプリング値を時系列に従って並べた時系列データにおける複数のピーク値の位置を正確に推定できるようにする。
【解決手段】レーダ装置においては、複数のサンプリング値を時系列に従って並べた時系列データにおいてサンプリング値の極大値および極小値を検出し(S10)、極小値として得られたサンプリング値以上の値を基準値として、この基準値よりも大きな値を有するサンプリング値のうちの時系列データにおいて互いに隣接するものをそれぞれグループとし、これらのグループ毎に入力信号が最大となるピーク位置を推定する(S20)。このようなレーダ装置によれば、極小値を変更することなく基準値を設定し、ピーク位置を推定することができるので、各ピーク位置を正確に推定することができる。従って、精度よく物標までの距離を検出することができる。
(もっと読む)
物標検出装置,壁判定方法
【課題】車両の周囲に存在する物体を検出する物標検出装置において、壁状の静止物体が移動物体として誤認識される頻度を低減する。
【解決手段】探査周期毎に測距データを取得し(S100)、取得した測距データをクラスタリング(S110)し、自車両が停止中ではない場合(S120-N)、クラスタが単一の反射点からなる場合、即ち、クラスタが示す物標が壁であるか否かを判定できない場合(S140-N)、または、クラスタが複数の反射点からなり(S140-Y)、かつ同一クラスタに属する二つの反射点間を結ぶ直線の傾き(基準方向と交差する角度)Yが許容壁範囲内(X−ΔX≦Y≦X+ΔX)にある場合、即ち、クラスタが示す物標が壁であると判定された場合(S150,S160-Y)、そのクラスタを、トラッキング処理や移動/停止判定の処理対象から除去する(S170)。
(もっと読む)
移動体通信システムおよび移動体ならびにそのビームの方向制御方法
【課題】 GPSが使用できず、したがってINSのみによって送信側および受信側移動体間の位置関係を計算しなければならない環境下において、送信側移動体が受信側移動体の方向に的確にビームを照射することが可能な移動体通信システムの提供。
【解決手段】 ペンシルビームを用いて移動体1〜4間で通信を行う移動体通信システムであって、送信側移動体が受信側移動体の方向に送信ビームを送信するビーム制御部24と、受信側移動体が送信ビームを受信し、受信した送信ビームに基づきモノパルス測角を行うモノパルス測角部34と、受信側移動体から送信側移動体に対しモノパルス測角の結果得た測角誤差値を通知する測角結果通知部35とを含み、ビーム制御部24は受信側移動体から取得した測角誤差値に基づきペンシルビームの照射方向を補正する。
(もっと読む)
信号処理装置、レーダ装置、および、信号処理方法
【課題】送信波の出力時間を短縮化して物体の角度検出精度を向上させることを目的とする技術に関する。
【解決手段】
ビート信号をAD変換してデジタルデータを導出し、デジタルデータを複数のデータ群に分割する。次に、データ群を高速フーリエ変換してデータ群の数に対応する複数の変換データを取得し、変換データを複数の組に分けて組ごとの相関行列を取得して、相関行列を平均した値を算出する。そして、相関行列を平均した値に基づいて検知点の角度を演算する。これにより、検知点に対応する複数の物体のそれぞれの角度を精度よく検出できる。
(もっと読む)
アンテナ装置
【課題】車載用のレーダ装置で用いられる高効率なアンテナ装置を提供する。
【解決手段】車載用のレーダ装置で用いられるアンテナ装置は、複数のアンテナ素子が縦方向に並べられて構成されるアンテナ(図示の例では、受信アンテナ12−1〜12−N)を、前記縦方向と交差する横方向に複数並べて構成され、使用周波数の自由空間波長λに対して、前記横方向に複数並べられる前記アンテナの間隔Pが約2λであり、前記複数のアンテナ素子のそれぞれにホーン33が設けられた、ことを特徴とする。
(もっと読む)
フェーズドアレーアンテナ
【課題】 レーダ装置に用いるフェーズドアレーアンテナにおいて、送信電力の一部が素子間相互結合により送受切り替えスイッチにつながれた終端器で消費されるため、アンテナの効率が低下する。
【解決手段】 信号の送受信を行う第1のアンテナと、信号の受信のみを行う第2のアンテナと、前記第1のアンテナに送信信号を分配するとともに前記第1のアンテナと前記第2のアンテナからの受信信号を合成する給電回路とを備えたフェーズドアレーアンテナであって、前記第2のアンテナは、前記第1のアンテナが前記送信信号を送信する時にもれこんだ送信信号を反射するスタブを設けることで、信号送信時の効率低下を防ぐようにした。
(もっと読む)
車両周辺監視装置
【課題】車両周辺の監視領域に存在する対象物を少なくともレーダ装置により検知する場合に、監視領域に存在する個々の対象物の検知の信頼性を高めることができる車両周辺監視装置を提供する。
【解決手段】レーダ装置2よりレーダ電波の走査を行なう車両周辺の監視領域を車載カメラ3により撮像し、撮像画像の色情報又は輝度情報に基づいて、監視領域におけるレーダ電波の反射率の分布を反射率推定手段5により推定する。レーダ電波の反射波に受信強度に対する閾値(監視領域の各局所に対応する閾値)を、受信強度閾値設定手段6により、推定した反射率の分布に応じて設定する。対象物認識手段7は、少なくとも前記反射波の受信強度と前記設定された閾値との比較に基づいて前記監視領域に存在する対象物を検知する。
(もっと読む)
絶対速度推定装置
【課題】速度出力のためのデータを所得した時間にずれが存在しても、検出対象物の絶対速度を正確に推定することができる絶対速度推定装置を提供する。
【解決手段】取得したデータから対象物Tの相対速度Ttを出力する相対速度出力手段104と、センサ13〜15から出力されるデータから自車両1の絶対速度Vmを出力する自車速度出力手段105と、手段104,105が同期して出力した相対速度Vt及び自車速度Vmを求めるためにそれぞれ利用したデータを取得した時間の推定ずれ量Dを取得するずれ量取得手段106と、推定ずれ量Dだけ時間をずらせて相対速度Vsに自車速度Vmを加算して求めた対象物Tの推定絶対速度Vを出力する絶対速度推定手段107とを備える。ずれ量取得手段106は、複数の対象物Tiのうち、各対象物Tiの相対速度Vtiと自車速度Vmとの差が0となる対象物Tiの数が最大となるずれ量dを、推定ずれ量Dとして取得する。
(もっと読む)
探知測距装置および探知測距方法
【課題】センサアレーを用いて到来方向推定を行い、さらに複数の送信センサを用いて実効開口を拡大する探知測距装置において、スイッチの切り替えによる時分割処理の弊害をなくし、高精度の測定を可能とする。
【解決手段】変調器161,162において互いに直交する符号を用いて送信波を拡散し、送信用センサAT1,AT2から放射する。受信用センサAR1〜ARNで受信された信号のそれぞれを分岐器241,242で2分岐し、そのそれぞれについて復調器2611〜262Nにおいて送信側で用いた符号と同じ符号により逆拡散する。
(もっと読む)
後側方障害物検知装置
【課題】自車両がガードレール等の非報知対象物と近い位置にある場合であっても、報知対象物である他車両等が非報知対象物として検知されることを防止することが可能な後側方障害物検知装置を提供する。
【解決手段】自車両の後側方領域内の対象物の存在を検知する後側方障害物検知装置であって、対象物を非報知対象物として検知する検知角度の範囲である非報知対象物検知範囲の大きさを制御する非報知対象物検知範囲制御部と、自車両から非報知対象物までの距離を算出する距離算出部とを備え、非報知対象物検知範囲制御部は、距離算出部によって算出された自車両から非報知対象物までの距離に応じて、非報知対象物検知範囲の大きさを制御する。
(もっと読む)
後側方障害物検知装置
【課題】自車両が低速で走行する場合であっても、非報知対象物であるガードレール等の静止物が、報知対象物である他車両等の移動物として検知されることを防止することが可能な後側方障害物検知装置を提供する。
【解決手段】自車両の後側方領域内の対象物の存在を検知する後側方障害物検知装置であって、対象物を非報知対象物と報知対象物に分類する対象物分類部と、自車両の走行速度に応じて、対象物を非報知対象物に分類する条件を制御する非報知対象物分類条件制御部とを備える。
(もっと読む)
21 - 40 / 1,457
[ Back to top ]