
Fターム[2F065MM28]の内容
光学的手段による測長装置 (194,290) | 走査形態 (5,021) | 受光系による走査 (768) | 投光系との同期 (240)
Fターム[2F065MM28]に分類される特許
21 - 40 / 240
白色光走査干渉法を使用した膜厚測定を行うための方法及び装置
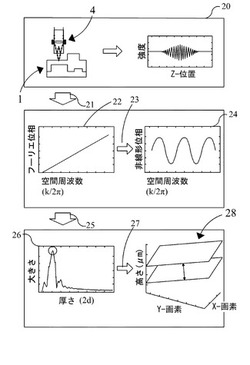
【課題】広帯域干渉法によって透明な膜の厚さを測定する方法を提供する。
【解決手段】広帯域干渉法によって膜のコレログラムを作成する工程と、コレログラムにフーリエ変換を適用して、フーリエ位相関数を得る工程と、フーリエ位相関数の線形成分を取り除く工程と、残りの非線形成分に第2積分変換を適用して非線形成分の積分振幅関数を得る工程と、積分振幅関数のピーク位置を特定する工程と、波長に依存する膜の屈折率を考慮して前記膜の厚さを前記ピーク位置の横座標の2倍値として決定する工程と、を含む。最後の2つの工程の代わりに、前記積分振幅関数のピーク位置を特定する工程と、前記ピーク位置の横座標の2倍値として膜の厚みを決定する工程と、を含んでもよい。
(もっと読む)
変位検出装置、露光装置、及びデバイス製造方法

【課題】うねりによる影響を極力無くして被検面の変位量を検出する。
【解決手段】 対物レンズ18は、光源13が発した光束を被検面23a上に微小なビーム光として投射する。シリンドリカルレンズ21は、被検面23aで反射した反射光束に非点収差を与える。受光センサ19は、非点収差が与えられた反射光束を入射させて受光パターンに応じた出力変化が得られるように受光面が複数に分割されている。信号処理部26は、受光面から得られる変位信号に基づいて被検面23aの変位を検出する。表面すねり補正部28は、変位信号に基づいて表面のうねりの周期ピッチを求め、その時点の被検面23a上のビーム径が周期ピッチよりも大きくなるように集光レンズ20と受光面19aとの間隔を変え、これに連動して対物レンズ18を移動する。
(もっと読む)
3次元形状測定装置
【課題】受光センサにて受光した反射光のスポットが欠けた場合であっても、精度良く測定対象物の3次元形状を測定できる3次元形状測定装置及び3次元形状測定方法を提供する。
【解決手段】受光信号の強度の閾値としてレベルL1を設ける。受光信号の強度が最も大きい受光素子の位置を基準位置P1(n)とする。基準位置P1(n)の両側から、受光信号の強度がレベルL1である受光素子又はレベルL1に最も近い受光素子の位置を1つずつ取得する。前記取得した2つの受光位置の中点と基準位置P1(n)とのずれ量D1が許容値以下であれば、基準位置P1(n)を反射光の結像位置P(n)と決定し、結像位置P(n)を用いて、その測定ポイントの3次元座標を算出する。ずれ量D1が許容値より大きければ、その測定ポイントの3次元座標を算出しない。
(もっと読む)
光学センサ及び画像形成装置
【課題】対象物の相対的な位置情報を短時間で精度良く検出することができる光学センサを提供する。
【解決手段】 面発光レーザアレイを含む光源11、非平行透明部材12、コリメートレンズ13、対物レンズ14、及び処理装置などを備えている。面発光レーザアレイの複数の発光部から射出された複数の光束は、Z軸方向に関して互いに異なる位置に集光される。そして、処理装置は、面発光レーザアレイの複数の発光部に一定の電圧を印加するとともに、発光部毎にセルフミキシング信号をプリンタ制御装置に出力する。プリンタ制御装置は、各発光部のセルフミキシング信号に基づいて、Z軸方向に関する記録紙との距離を求める。
(もっと読む)
乗員検知装置
【課題】大人と子供とを精度良く判別する。
【解決手段】乗員検知装置10は、単眼距離画像センサ11から出力される距離画像に基づき、乗員領域の体積を推定し、該体積が所定体積閾値以上であるか否かを判定する体積判定部56と、車両上下方向の所定位置よりも下方側に車室内の乗員の膝部が存在するか否かを判定する膝部判定部57と、体積判定部56により乗員領域の体積が所定体積閾値以上であると判定された場合であって、膝部判定部57により所定位置よりも下方側に膝部が存在すると判定された場合には乗員は大人であると判定し、膝部判定部57により車両上下方向の所定位置よりも下方側に膝部が存在しないと判定された場合には乗員は子供であると判定する乗員判定部58とを備える。
(もっと読む)
透光性管状物体の厚さ測定装置
【課題】 透光性管状物体の厚さを全域にわたって短時間で精度よく測定する。
【解決手段】 測定用レーザ光をガルバノミラー35で反射させてガラス管Gに照射し、ガラス管Gの外周面で反射する反射光及び内周面で反射する反射光をラインセンサ39で受光し、反射光の受光位置からガラス管Gの厚さを検出する。サーボ用レーザ光源40からのサーボ用レーザ光をガルバノミラー35で反射させて、ガラス管Gにおける測定用レーザ光の照射位置又はその近傍位置にZ軸方向から照射する。フォトディテクタ48でガラス管Gからのサーボ用レーザ光の反射光を受光し、Y軸方向エラー信号生成回路119、Y軸方向サーボ回路120及びY軸方向ドライブ回路121が、モータ36を駆動制御することにより、測定用レーザ光の光軸がガラス管Gの中心軸と交差するようにガルバノミラー35のX軸線周りの回転をサーボ制御する。
(もっと読む)
変位計測装置
【課題】クロストークによる検出誤差を軽減し、移動体の高帯域速度変動を高精度に検出することができる変位計測装置を得る。
【解決手段】移動体に設けた光学的に識別可能なマークを照明する第1の発光部と前記マークを介した光を検出する第1の受光部とを備える第1の検出部と、前記第1の検出部に対して前記移動体の移動方向に所定の間隔を隔てて配置され、前記マークを照明する第2の発光部と前記マークを介した光を検出する第2の受光部とを備える第2の検出部と、前記第1の発光部と、前記第2の発光部を時分割で発光させる時分割発光手段と、前記マークのうち同一のマークを前記第1、第2の検出部で各々検出する第1のタイミングと前記第1のタイミングと異なる第2のタイミングを検出する検出手段と、前記検出手段で得られた前記第1のタイミング及び前記第2のタイミングを用いて前記移動体の移動速度を算出する速度算出手段と、を有する。
(もっと読む)
3次元形状測定装置
【課題】出射光学系の部品の取り付け角度がずれたとき、出射光学系から出射されるレーザ光の光軸方向のずれを相殺するように出射光学系に入射するレーザ光の光軸の方向を調整することができる3次元形状測定装置を提供する。
【解決手段】レーザ光を出射するレーザ光源10とレーザ光を走査する第1ミラー16との間に、直交する2つの回転軸回りに回転可能に支持されたミラー14aを設ける。測定対象物OBからの反射光を受光して受光位置に応じた信号を出力する第1受光センサ24と、第1受光センサ24にて反射した反射光を受光して受光位置に応じた信号を出力する第2受光センサ26を設ける。3次元カメラCAと測定対象物OBが所定の位置関係になるようにセットし、反射光が第2受光センサ26の所定の範囲内にて受光されるように、ミラー14aを回転させる。
(もっと読む)
膜厚測定装置および膜厚測定方法
【課題】簡便な光源を利用した場合であっても光の反射による外乱の影響を抑えて光透過性薄膜の厚さを確実に算出できるようにする。
【解決手段】光透過性薄膜102の表面にレンズが合焦した状態では基板101の表面をフォーカスアウトさせて基板101から反射される光が合焦判定の外乱として作用することを防止する一方、基板101の表面にレンズが合焦した状態では光透過性薄膜102の表面をフォーカスアウトさせて光透過性薄膜102から反射される光が合焦判定の外乱として作用することを防止し、基板体100の平面上の同一箇所(xi,yi)で光透過性薄膜102を含めた基板体100の厚さと光透過性薄膜102を除いた基板101のみの厚さの差分に基いて光透過性薄膜102の厚さを適切に算出する。
(もっと読む)
車輪形状測定装置
【課題】作業員の技量にかかわらず短時間で精度高く車輪外周面形状を測定することが可能な車輪形状測定装置を提供する。
【解決手段】車輪1におけるフランジ及び踏面を含む外周面2の形状を測定する車輪形状測定装置100であって、筐体(基部)10と、該筐体10内に取り付けられて車輪1の径方向外側から車輪1の外周面2に向かって光線を照射し、その反射光によって該外周面2までの距離を検出する距離測定部30と、筐体10を車輪1に対して位置決めして固定する位置決め手段20と、距離測定部30を筐体10に対して車輪1の軸線O方向にスライド移動可能とさせるスライド手段40と、外周面2における光線の反射にて生じる乱反射光を吸収する乱反射光吸収手段60とを設ける。
(もっと読む)
鏡面検査方法及びその装置
【課題】
鏡面検査装置において,高感度にかつ定量的に表面の凹凸を検出することが,困難であった。
【解決手段】
光源から発射された照明光を略平行光にして鏡面状の表面を有する試料に照射し、照明光が照射された試料からの反射光を集光レンズで集光し、集光レンズで集光した試料からの反射光をピンホールを通過させて反射光以外の光を遮光し、ピンホールを通過した試料からの反射光を集光レンズの焦点位置からずれた位置に配置された検出器で検出し、検出器で検出した信号を処理する鏡面検査方法において、検出器はピンホールを通過した試料からの反射光を異なる複数の条件で検出し、検出器で異なる複数の条件で検出した反射光の検出信号を用いて試料上の局所的な凹凸度の分布を検出するようにした。
(もっと読む)
点群データ処理装置、点群データ処理システム、点群データ処理方法、および点群データ処理プログラム
【課題】測定対象物の点群データからその特徴を抽出し、対象物の輪郭に係るデータを自動的かつ短時間に生成する技術を提供する。
【解決手段】測定対象物の二次画像と、この二次元画像を構成する複数の点の三次元座標データとを関連付けた点群データの中から、演算の負担の大きい非面領域に係る点群データ除去する非面領域除去部101と、非面領域のデータが除去された後の点群データに対して、面を指定するラベルを付与する面ラベリング部102と、ラベルが付与された面から連続した局所領域に基づく局所平面を利用して、対象物の輪郭線を算出する輪郭線算出部106を備える。
(もっと読む)
3次元形状測定装置
【課題】焦点位置を高速に移動させることなく、測定対象物の表面に形成されるレーザ光の照射スポットを小さく保つことができる3次元形状測定装置を提供する。
【解決手段】
レーザ光を出射するレーザ光源10と前記レーザ光を反射して走査するミラー30を設ける。レーザ光源10とミラー30の間にスポット形成器20を設ける。スポット形成器20は、前記レーザ光を平行光に変換するコリメートレンズ22、前記平行光をリング状の輪帯光に変換するフィルタ23、前記輪帯光を集光する第1リレーレンズ24及び第2リレーレンズ25を備える。さらに、測定した測定対象物までの距離の平均値を算出して、前記算出した平均値に応じてスポット形成器20を前記レーザ光の光軸方向に移動させる移動装置20aを設ける。
(もっと読む)
校正用冶具、校正方法、及び該校正用冶具が搭載可能な形状測定装置
【課題】レンズの偏心を測定できる形状測定装置を簡易的に、かつ高精度に校正できる校正用冶具、校正方法、及び該校正用冶具が搭載可能な形状測定装置を提供する。
【解決手段】校正用冶具100は、中心が円周上を3等分し、計測用基準球を接するように設置できる3個の基準球2を備える。形状測定装置は、該校正用冶具を配置可能であり、被測定物の形状に関する情報を取得するための第1プローブと、校正用冶具に対して第1プローブと反対側に設けられ被測定物の形状に関する情報を取得するための第2プローブと、第1プローブ及び第2プローブにより、配置された計測用基準球を測定して第1測定結果及び第2測定結果を求める測定部と、第1測定結果及び第2測定結果を比較してシフトを算出するシフト量算出部と、を備える。校正方法は、上記形状測定装置を用いた測定ステップとシフト量等を算出するシフト量算出ステップとを備える。
(もっと読む)
液浸非接触形状測定装置
【課題】液中の測定ワークの表面形状も測定することができる液浸非接触形状測定装置を提供する。
【解決手段】レーザープローブ3の下側を容器形状のコレット24で覆い、コレット24をレーザープローブ3ごと上下動させることができるため、測定ワーク6が設けられた液中にコレット24を浸して、液中の測定ワーク6の表面をレーザー光Lにより計測することができる。電極プローブ26により液中における測定ワーク6の表面のイオン分布を計測することもできる。
(もっと読む)
3次元形状測定装置
【課題】MEMSミラーを用いてレーザ光を走査する3次元形状測定装置において、使用開始から長期間が経過してもミラーの回転角度を精度よく取得でき、測定精度を一定に保つことができるようにする。
【解決手段】
回転可能に支持されたミラー14aと供給される電気信号に応じてミラー14aを回転させて変位させる駆動回路とが一体的に形成された第1ミラー14を設ける。ミラー14aは、それぞれレーザ光を反射可能な第1反射面及び第2反射面を有する。第1反射面に測定装置と測定対象物OBとの距離を測定するためのレーザ光を照射する。第2反射面にミラー14aの回転角度を検出するためのレーザ光を照射する。第2反射面からの反射光を受光する受光センサ26を設ける。受光センサ26における反射光の受光位置からミラー14aの回転角度を計算するミラー角度検出回路42を設ける。
(もっと読む)
光干渉断層撮像装置、光干渉断層撮像方法、およびプログラム
【課題】分光器の分解能が異なる場合に発生するコントラスト差を補正する。
【解決手段】光源から照射された測定光の対象物体からの戻り光と、光源から照射された参照光のミラーからの戻り光とを合波して、分光器により分解されて検出された波長スペクトルに基づいて対象物体の断層像を構成する構成部を備える光干渉断層撮像装置であって、分光器の分解能を含む対象物体の測定条件を選択する選択部と、構成部により構成された断層像の光強度を、選択部により選択された分光器の分解能ごとに予め定められた伝達関数によって規格化する規格化部と、規格化部により規格化された断層像の光強度から画像を形成する画像形成部と、を備える。
(もっと読む)
基板検査方法及び装置
【課題】マスク基板に対して洗浄加工を行なった場合の洗浄加工後にマスク基板に残る欠陥が洗浄加工プロセスによるものなのか、マスク基板自体の内部欠陥によるものなかを容易に判定する。
【解決手段】第1及び第2の受光手段に受光された散乱光に基づいて基板の両面(表面及び裏面)に存在する欠陥を検出することができるので、基板の洗浄加工の前後で両面の欠陥の存在位置をそれぞれ比較することによって、洗浄加工によって基板両面に存在していた欠陥が除去されたか否かを容易に判定することができる。すなわち、基板の洗浄加工処理によって基板から所定数の欠陥が除去されなかった場合には、マスク基板の内部に欠陥が存在する可能性が高いので、基板内部の欠陥の検出処理行い。その結果に基づいて洗浄加工によって除去できなかった欠陥が基板内部の欠陥であるのか、洗浄加工プロセスの問題によるものかを容易に判定することができるようになる。
(もっと読む)
光波干渉測定装置
【課題】干渉縞の濃淡に基づき対象物の形状を測定する光学干渉測定装置において、干渉縞の観測対象領域を自動的に設定する。
【解決手段】ベースプレート36と、これの上に置いたブロックゲージ34の干渉縞画像を複数得る。取得した複数の画像において、ベースプレートとブロックゲージの境界であるエッジ抽出を行い、エッジ画像を得る。エッジ画像を加算して、さらに所定のしきい値により二値化し、ベースプレートとブロックゲージの境界を抽出する。得られた境界に基づきブロックゲージ上の干渉縞画像を得る。
(もっと読む)
表面形状の測定方法及び測定装置
【課題】位相変調された干渉信号を検出し、干渉信号の位相を求める信号処理演算を行うことによってナノメータオーダでの分解能で表面形状測定を行うことのできる、表面形状の測定方法及び測定装置を提供する。
【解決手段】半導体レーザ光源11からのレーザ光を偏光方向が互いに直交し位相が異なる2つの光の合成光に変換してから回転多面体ミラー32に導き、レンズ33を通過した合成光を構成する2つの光を偏光ビームスプリッタ34により分離してその一方の光を参照面ミラー42、他方の光を被測定物体41の表面に照射する。参照面ミラー42からの反射光と被測定物体41の表面からの反射光を偏光ビームスプリッタ34により再び重ね合わせ、偏光板52を通過させることにより参照面ミラー42からの反射光と被測定物体41の表面からの反射光を干渉させる。
(もっと読む)
21 - 40 / 240
[ Back to top ]