
Fターム[2F065MM28]の内容
光学的手段による測長装置 (194,290) | 走査形態 (5,021) | 受光系による走査 (768) | 投光系との同期 (240)
Fターム[2F065MM28]に分類される特許
41 - 60 / 240
長寸法測定装置
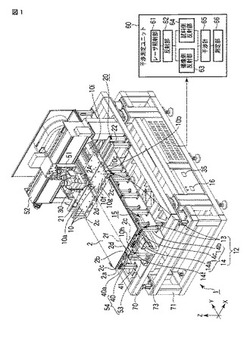
【課題】使い勝手の良い長寸法測定装置を提供すること。
【解決手段】長寸法測定装置1は、試料2が載置し、配置位置が固定されている試料台10と、試料2に形成されたパターンに照明光を照射する照明ユニット20と、照明光から得られたパターンの像を撮像する撮像ユニット30と、試料台10の平面度を調整し試料台10を支持する平面度調整機構12と、エアを試料台10に送気し、試料台10からエアを吸引する送気吸引部16と、試料台10にて浮上している試料2に吸着する吸着機構40と、撮像ユニット30をZ方向に移動させるZステージ51と、撮像ユニット30をX方向に移動させるXステージ52と、吸着機構40を介して試料2をY方向に移動させるYステージ53と、試料2に形成されたパターン上の2点間の距離を測定する干渉測定ユニット60とを具備している。
(もっと読む)
形状測定装置

【課題】振動の影響による3次元形状の測定誤差を低減した形状測定装置を提供する。
【解決手段】形状測定装置は、被測定物をライン光で照明して撮像するプローブと、プローブと被測定物とを相対移動させるリニアモータ17と、照明の状態と撮像の状態から被測定物の形状を測定する形状演算部34と、プローブの振れを検出する振れ検出部28とを備え、振れ検出部28に検出された振れに基づいて測定の補正を行うようになっている。
(もっと読む)
空間座標測定システムおよび空間座標測定方法
【課題】 角度情報を使用せずに、距離情報のみでターゲットの空間座標を精度良く特定することができる空間座標測定システムおよび空間座標測定方法を提供する。
【解決手段】 この空間座標測定システムは、測定物W上に設けられた一つのターゲットTgの空間座標を求める空間座標測定システムである。空間座標がそれぞれ特定された少なくとも3個以上のレーザートラッカー1と、前記3個以上のレーザートラッカー1のうちの3個のレーザートラッカー1から、前記一つのターゲットTgに対しレーザー光Lbをそれぞれ照射させて測定した3箇所の距離の測定値と、前記3個のレーザートラッカー1の空間座標とから、前記ターゲットTgの空間座標を求める演算手段3とを有する。
(もっと読む)
物体検出装置
【課題】 検出物までの距離、位置を検出する物体検出装置の提供
【解決手段】 投光素子LE(s,t)が検知光を投光しているとする。このときに、受光素子RE(s,t)、受光素子RE(s,t+1)、受光素子RE(s,t+2)、受光素子RE(s,t+3)を、順次、作動させる。例えば、投光素子LE(s,t)が検知光を投光しているときに、受光素子RE(s,t+3)が反射光を受光したとすると、物体が位置c4付近にあると判断できる。投光素子LE(s,t)から投光方向l1に向かって投光された検知光が、位置c4付近に存在する物体によって反射され、その反射光が受光方向r4に向かって進行し、受光素子RE(s,t+3)によって受光されたと考えられるからである。
(もっと読む)
チャックテーブルに保持された被加工物の計測装置およびレーザー加工機
【課題】チャックテーブルに保持された半導体ウエーハ等の被加工物の上面位置を計測する計測装置および計測装置を装備したレーザー加工機を提供する。
【解決手段】発光源からの光を第1の経路に導くとともに第1の経路を逆行する反射光を第2の経路に導く第1の光分岐手段と第1の経路に導かれた光を平行光にし、この平行光を第3の経路と第4の経路に分ける第2の光分岐手段と第3の経路に配設され第3の経路に導かれた光を被加工物に導く対物レンズと、第2の光分岐手段と対物レンズとの間に配設された集光レンズと、第4の経路に導かれた平行光を反射し、この反射光を逆行せしめる反射ミラーと、第2の経路に導かれた反射光を回折する回折格子と、回折光の所定の波長域における各波長の逆数の光強度を検出するイメージセンサーと、検出信号からの分光干渉波形と理論上の波形関数に基づくフーリエ変換理論による波形解析を実行する制御手段とを具備している。
(もっと読む)
リソグラフィ装置、デバイス製造方法、およびパターンを基板に付与する方法
【課題】基板表面のレベル変動の測定時間を短縮する。
【解決手段】リソグラフィ装置は、パターニングデバイスからパターンを基板(W)に転写するパターニングサブシステムを備える。パターニングサブシステムは、記録された基板表面のレベル変動の測定結果に従って制御される。レベルセンサ(LSP,LSD)は、レベルセンシング放射ビームを投影して基板表面の位置から反射させ、反射したセンシングビームを検出して位置の表面レベルを測定するために設けられる。レベルセンサは、少なくとも一つの移動光学素子(MP,MD)内蔵しており、基板表面を光学的移動(δY)により少なくとも一次元にスキャンして、レベルセンサと基板との間の機械的動作なしで異なる位置の表面レベルの測定結果を取得する。光路長等化手段は、成形リフレクタ及び/または追加的な移動ミラーを用いることにより、スキャンの間の焦点変動を回避するために配置される。
(もっと読む)
レーザ共焦点顕微鏡、及び、試料表面検出方法
【課題】試料表面を正確に検出することができるレーザ共焦点顕微鏡及び表面検出方法を提供する。
【解決手段】照明光を射出するレーザ光源2と、試料11に照明光を照射する対物レンズ10と、対物レンズ10の焦点位置と試料11の間の距離を変化させるステージ17と、レーザ光源2と対物レンズ10の間に配置され光を偏光特性で分離する偏光ビームスプリッタ3と、偏光ビームスプリッタ3と対物レンズ10の間に固定されたλ/4板7と、偏光ビームスプリッタ3と対物レンズ10の間で挿脱可能なλ/4板8と、焦点位置と光学的に共役な位置に配置された共焦点絞り13と、共焦点絞り13を通過した試料11からの検出光の強度に応じた信号を出力する光検出器14と、を含んでレーザ共焦点顕微鏡を構成する。多重反射試料を観察する場合にλ/4板8を偏光ビームスプリッタ3と対物レンズ10の間に挿入して観察する。
(もっと読む)
自律移動装置及びその制御方法
【課題】自己位置推定機能と足元の障害物検出機能とを良好に両立させること。
【解決手段】非接触式の距離センサ17と、移動状況に関する所定の条件に基づいて、足元の障害物検出処理か自己位置推定処理のいずれの処理を実行するか判定する判定部58と、足元の障害物検出処理を実行する場合に、距離センサ17からの測定信号の方向を足元付近に向けて変化させ、自己位置推定処理を実行する場合に、測定信号の方向を遠方の対象物を測定可能となる向きに変化させる反射部19と、距離情報に基づいて足元の障害物を検出する足元障害物検出部57と、距離情報に基づいて自己位置を推定し、移動量から求めた自己位置を、推定した自己位置を用いて補正する自己位置推定部55と、検出した障害物情報と、補正した自己位置とに基づいて、移動装置23の制御を行う走行制御部59と、を備える。
(もっと読む)
ロボット装置
【課題】計測前までの組み立て作業を無駄にせず組み立てを継続することができるようにしたロボット装置を提供する。
【解決手段】ロボット101と、ロボット101に取り付けられワークを把持するエンドエフェクタ106,107と、ワークの形状計測センサ108と、入力装置を有しロボットの動作を制御する制御装置102と、を有し、制御装置102は、あらかじめ決められた範囲を計測範囲として、ワークを形状計測センサにより計測させ、計測範囲にワークの全体像が入っていない場合には、計測範囲を変えて再計測し、ワークの位置姿勢を決定し、ワークの位置姿勢へエンドエフェクタを移動させてワークを把持し、再計測は、入力装置から入力された計測データに基づいて、計測範囲を変えて再計測を実行する。
(もっと読む)
空調装置
【課題】ダンパーの開口率を安価な設備で測定する空調装置。
【解決手段】吹き出しグリル11の風上側にダンパー12を備えた吹き出し口装置1と、吹き出しグリル11の風上側に設けられた反射鏡15と、ダンパー12の風上側に配置された光学測定ユニット2と、光学測定ユニット2に設けられ、ダンパーの開口12e1の最大開口幅の1/2以上の幅を有する平行光線4を、反射鏡15に垂直に投射する投光器27と、光学測定ユニット2に設けられ、平行光線4が開口12e1を通過して反射鏡15により反射された反射光4aの強度を測定する光検知器25と、平行光線4が吹き出し口装置1の開口121e1を通過する位置に光学測定ユニット2を移動する移動手段5とを有し、反射光4aの強度に基づきダンパー12の開口率を算出する。
(もっと読む)
トンネルデータ処理システムおよびトンネルデータ処理方法
【課題】 GPSが利用できないトンネル内において、距離メータなどの機械的計測により得た入力データに対してGPSや距離メータ等に起因する誤差を正確に補正する。
【解決手段】 走行する車両に搭載された距離メータやジャイロ装置などの位置検知手段210により測定した原座標系の位置データと、車両に搭載された壁面検知手段120により位置データと同期させた原座標系のトンネル内面点群データをデータ入力部120を介して入力する。入口被検知板310に関するGPSでの計測データと既知の位置データの差分からGPSの誤差を補正し、出口被検知板320に関する距離メータの計測データと既知の位置データの差分からトンネル内で距離メータの誤差により蓄積したトンネル内計測誤差の総計を算出し、キロポスト上の任意の点に対してはトンネル内計測誤差を按分して補正する。
(もっと読む)
レール変位量測定におけるレール検出方法およびレール変位量測定装置
【課題】
レール近傍にあって頭面がレールに比べて比較的幅のある平面形状の物体をレールと誤検出することを防止することができるレール変位量測定装置におけるレール検出方法を提供することにある。
【解決手段】
この発明は、測定三角形が形成されたときのこの測定三角形において測定されるレールの位置とこの測定三角形において第1の距離検出器あるいは第2の距離検出器のいずれかにより測定されるレールの位置との位置誤差を算出して、この位置誤差が所定値の範囲にあるときに測定対象をレールとして検出する。
(もっと読む)
干渉計
【課題】移動体までの距離を安全に測定することができる干渉計を提供すること。
【解決手段】干渉計1Aは、干渉計1Aから射出される光の光量を調整可能に構成された調光手段3Aと、受光手段47,49の受光量が所定の第1閾値以下か否かを判定する第1判定手段と、第1判定手段が、受光量が第1閾値以下と判定した場合、調光手段3Aに、干渉計1Aから射出される光の光量の低減を命じる低減信号を出力する低減信号出力手段とを備える。調光手段3Aは、低減信号が入力された場合、光源から射出される光の光量を低減させる。従って、干渉計1Aが反射体101を見失ってしまった場合、調光手段3Aが干渉計1Aから射出される光の光量を低減させることとなるので、干渉計1Aの周囲で作業する人に干渉計1Aから測定光が照射されてしまうことを防止でき、移動体2までの距離を安全に測定できる。
(もっと読む)
移動環境認識装置及び方法
【課題】移動体の移動対象を簡易に測定する。
【解決手段】円錐検出光DETと測定対象の表面S2との交点TRからの反射光に基づいてセンサ原点Oから測定対象S2までの距離を測定し、当該測定結果から得た交円TRの特徴量によって測定対象表面S2の形状を求めるようにしたことにより、円錐検出光DETの立体的な構成を利用して測定対象S2の形状を簡便かつ確実に測定することができる。
(もっと読む)
ひずみ計測方法、ひずみ計測装置およびプログラム
【課題】測定対象5が受ける光の照度や照射方向の変化の影響を受けない、安定した計測ができる、ひずみ計測装置を提供する。
【解決手段】コンピュータ4は、測定対象5の所定領域6を表面高さ計測器2で計測して得られた当初表面高さ分布から、所定領域6の点A,Bをそれぞれ包含する微小領域a,bの表面高さ分布を抽出する微小領域抽出手段、所定領域6の、経時後表面高さ分布上の、前記微小領域a,bに最も近似する微小領域a’,b’内にあって、前記微小領域a,bにおける前記点A,Bに対応する点A’,B’の座標を算出する座標算出手段、及び測定対象5の線分AB方向のひずみを算出するひずみ算出手段として機能する。
(もっと読む)
三次元形状測定システム及び三次元形状測定方法
【課題】被測定物の三次元形状の外観を効率良く把握できる三次元形状測定システム及び三次元形状測定方法を提供する。
【解決手段】色が規則的に変化する光パルスをパルス光源56及びチャープ導入装置60により生成し、生成された前記光パルスをワーク30に照射し、該ワーク30から反射された前記光パルスの反射光像をシャッタユニット42により取得し、取得された前記反射光像の二次元情報及び色情報を用いてワーク30の三次元情報をカラー二次元検出器88により取得する。また、カラー二次元検出器88により取得されたワーク30の二次元情報に基づいて所定の箇所を選択し、該所定の箇所における三次元情報を取得する。
(もっと読む)
白色干渉法による管内面の形状測定装置及び方法
【課題】白色干渉法を用いた非接触測定器において、長さが1メートル以上あるくびれ形状を持つような細い管内の内面形状をミクロンオーダの高精度で計測できる測定方法及び装置を提供する。
【解決手段】白色光源3を参照光と測定光に分割して参照光を参照光路長スキャナ部7に送り測定光をセンサー部8に送る光カプラ4と、参照光路長スキャナ部から返った参照光とセンサー部から返った測定光の白色干渉を検出する光検出器5とからなり、測定対象の細管内に通した透明管内でセンサー部を移動させることで、透明管を透過する測定光により非接触で前記細管の内面形状を測定することを特徴とする白色干渉法による管内面の形状測定装置1の構成とした。
(もっと読む)
鋼管の寸法測定装置
【課題】鋼管の横断面内の複数箇所における外径や肉厚を簡易にかつ十分な測定精度で自動測定を行う。
【解決手段】外径、肉厚測定用の第1の外側、内側レーザ距離計1,1Aを第1の直線13上に、位置合わせ用の第2の外側レーザ距離計2を第1の直線13と直交する第2の直線14上に、かつこれらを同心円上に、配置して、枠体3で支持し、枠体3を枠体回転手段、枠体移動手段、および、前後進手段で、全てのレーザ距離計の同心回転、第2の直線14の方向、および、同心円の直交方向の移動を可能とした。
(もっと読む)
三次元形状測定システム
【課題】被測定物の測定対象が広範囲である場合における測定の所要時間を短縮できるとともに、製造コストを低減することを可能とする三次元形状測定システムを提供する。
【解決手段】パルス光を生成するパルス光源36と、生成されたパルス光を分配する光分配器64と、分配された各パルス光に基づいて、色が規則的に経時変化するチャープ光パルスを生成する複数のチャープ導入装置84と、生成された各チャープ光パルスをワーク32の各照射領域94に照射し、ワーク32で反射された各チャープ光パルスの各反射光像を取得する複数の反射光像取得部114と、取得された前記各反射光像の二次元情報及び色情報を用いて、ワーク32の三次元情報を取得するカラー二次元検出器106とを有する。
(もっと読む)
計測装置及び計測方法
【課題】 船舶やトラック等で運搬され、製鉄所等のヤード内に積み上げられた鉄鉱石や石炭等の原料の山の山形形状を、正確かつ短時間で計測可能な計測装置を提供する。
【解決手段】 GPSアンテナ、レーザースキャナ、及びGPS受信機搭載のセンサBOXを含む計測装置を山積み用のアームに取り付ける。レーザスキャナは山に向けてレーザビームを一方向に走査し、前記レーザビームの走査角度と前記レーザビームの照射対象物までの距離とを関連付けて出力する。アームは回転可能であり、一方向に走査するレーザビームが前記山の全体を走査するように回転台を回転制御する。このようにアームを回転させながら正確な時刻が付加されたGPSデータとレーザースキャナデータを収集し、収集したデータに基づく演算処理によって山積みされた山の形状を再現する。
(もっと読む)
41 - 60 / 240
[ Back to top ]