
Fターム[2F065QQ00]の内容
光学的手段による測長装置 (194,290) | 信号処理 (28,761)
Fターム[2F065QQ00]の下位に属するFターム
サンプリング (206)
ピークホールド (43)
A/D変換、多値化 (3,603)
信号の遅延 (75)
信号の微分、差分 (1,068)
信号の積分 (316)
フーリエ変換;逆フーリエ変換 (544)
近似式(例;多項式近似) (1,899)
形状特定のためのパラメータ抽出 (463)
信号の記憶 (4,476)
信号の比較、減算 (4,276)
信号の加算 (639)
信号の特定位置の検出 (2,005)
画像処理(1次元を含む) (5,599)
統計処理 (2,372)
ゲート手段の利用 (33)
カウンター (263)
Fターム[2F065QQ00]に分類される特許
401 - 420 / 881
三次元画像取得装置
【課題】透明に近い細胞などの生体材料を非染色状態で試料とし、コントラストの低い試料を可視化する顕微鏡などの観察装置に最適な三次元画像取得装置およびその方法とこれを利用した加工装置の提供。
【解決手段】試料空間内の計測点に集光する光束を照射し、透過光量を計測する。透過光信号と参照信号から微弱な光吸収量を測定する。三次元走査しながら光吸収量を立体画素とする三次元マップを得る。この三次元マップに、計測点付近の光強度分布像をコンボリューション・カーネルとするデコンボリューション処理を行ない、非染色状態で透明に近い試料の三次元画像を得る。
(もっと読む)
ワーク計測装置、衝突防止装置および工作機械

【課題】ワークと工作機械の一部との衝突を防止する際に用いるワーク形状の3次元データを容易に取得することができるワーク計測装置、衝突防止装置および工作機械を提供する。
【解決手段】加工対象であるワークを加工する工具が取り付けられる主軸に取り付けられ、非接触で前記ワークまでの距離を走査して測定する測定部15と、空間を多面体状に分割して形成された3次元メッシュ構造を生成し、測定された前記ワークまでの距離情報に基づいて、ワークの測定点座標を算出し、3次元メッシュ構造の一単位と対応するワークの位置を走査した回数に対する、算出した測定点が一単位に含まれる回数の比率が所定の閾値以上のときに、一単位は前記ワークの形状であるとして測定形状マップを作成する形状認識部23と、が設けられていることを特徴とする。
(もっと読む)
格子画像の位相解析方法およびそれを用いた物体の変位測定方法ならびに物体の形状測定方法
【課題】 簡単な構成で材料および構造物などの物体の変位や形状やひずみを高精度で検出することができる位相解析方法を提供する。
【解決手段】 撮影された画像の元の輝度値(a)の左もしくは右から(縦方向の場合、上もしくは下から)1番目のスタート点から整数倍画素N(Nは3以上)毎に間引き(b)、左から2番目のスタート点からN画素毎に間引き(c)、左から3番目のスタート点からN画素毎に間引き(d)、抜けた画像データを線形補間することによって、元の画像を同じ解像度の画像を得る。
(もっと読む)
視線検出装置および方法、並びに、プログラム
【課題】正確に視線の方向を検出する。
【解決手段】顔向き推定部141は、視線の方向を検出する対象となる検出対象者の顔を撮影した顔画像に基づいて、検出対象者の顔の向きを推定する。目検出部142は、顔画像において、検出対象者の目の輪郭の少なくとも一部を検出する。瞳検出部143は、顔画像において、検出対象者の瞳を検出する。瞳方向推定部145は、人の目の輪郭に対する瞳の位置である瞳位置および顔の向きと視線の方向との間の相関関係、並びに、検出対象者の瞳位置および顔の向きに基づいて、検出対象者の瞳方向を推定する。本発明は、例えば、運転支援装置に適用できる。
(もっと読む)
露光方法及びデバイス製造方法、並びに露光装置
【課題】移動体の位置の安定且つ高精度な位置計測を可能にする。
【解決手段】移動体の上面に設けられたスケール(回折格子)に計測ビームを投射し、そのスケールにて発生する複数の回折ビームから生成される干渉光(強度I)を受光して、回折格子の周期方向に関するステージの位置情報(変位ΔYに係わる位相φ)を計測する。それと同時に、複数の回折ビームのうちの少なくとも1つの回折ビームを受光して、その強度IR、あるいはビーム断面内の強度分布を計測する。強度IR又は強度分布の計測結果を用いて、位置情報の計測結果を検証し、さらに計測誤差を補正する。
(もっと読む)
検出装置および方法、プログラム、記録媒体、並びにシミュレーションシステム
【課題】どのようなボールであっても、正確に回転を検出することができるようにする。
【解決手段】特徴点抽出部91は、第1画像および第2画像において、エッジを検出し、検出された複数のエッジを、それぞれ第1画像または第2画像の特徴点群として記憶する。簡易回転部92は、第1画像の特徴点群の3次元空間内での座標位置を特定し、その特徴点群の座標位置を所定のオイラー角だけ回転させ、最隣接特徴点間距離が最小となるオイラー角を特定する。特徴点対応制御部93は、最小の最隣接特徴点間距離のオイラー角の分だけ第1画像を回転させ、第1画像と、第2画像との間で演算された相関値に基づいて、第1画像と第2画像において、それぞれ2つの特徴点の対応付けを行う。回転数検出制御部94は、対応付けられた特徴点に基づいて、単位時間当たりのゴルフボールの回転量と回転方向を特定し、回転数などに関する情報を検出する。
(もっと読む)
中心位置検出方法および装置、並びに中心位置合わせ方法および装置
【課題】簡易な計算により半導体ウェハ等の回転体の中心位置を高精度に求めることのできる中心位置検出方法を提供する。
【解決手段】円板体の周縁に沿って配置された少なくとも3個のラインセンサを用い、これらのラインセンサにより検出される前記円板体のエッジ位置と円の方程式から求められる中心直交座標位置(a,b)を示す2次の有理多項式を、前記円板体の半径rに関与しない有理式に近似する。そしてこの近似式に基づいて、上記各ラインセンサによりそれぞれ検出される前記円板体の径方向のエッジ位置Sと、各ラインセンサの方位角θに基づいて予め求めた係数A,Bとの積和演算によって前記円板体の中心直交座標位置(a,b)を算出することを特徴とする。
(もっと読む)
分光光学系および分光測定装置
【課題】屈折・回折型レンズを用いたSchupmann光学系で配置される分光光学系により垂直落射照明を可能とし、かつ、DUV−UV(200nm〜400nm)領域の広帯域色補正を行うことを可能とする分光光学系および分光測定装置を提供する。
【解決手段】光源110と、視野絞り111と、リレーレンズ系140と、フィールドレンズ系150と、結像レンズ系160と、分光器170とを有し、リレーレンズ系140、フィールドレンズ系150および結像レンズ系160は、屈折型レンズおよび/または回折型レンズによるSchupmann光学系で配置され、かつ、リレーレンズ系140と結像レンズ系160のいずれか一方に回折型レンズを有する分光光学系であって、フィールドレンズ系150が2枚以上のレンズで構成され、そのうちの1箇所においてレンズが所定の距離だけ離して配置されている。
(もっと読む)
ラインセンサを利用した計測装置
【課題】画像処理を用いてパンタグラフとトロリ線との間に発生する接触力を精度良く測定する装置を提供するにある。
【解決手段】被測定物3に取り付けられたマーカー14をラインセンサ2で撮影し、ラインセンサ2で取得した画像を画像処理部70〜77で画像処理することにより、被測定物3の位置を測定する測定装置であって、マーカー14は、反射領域14b,14cと非反射領域14a,14d,14eとを交互に配置してなる縞模様状であって、非反射領域14a,14d,14e又は反射領域14b,14cの何れか1つは一方の長手方向(−x軸)に行くに従って幅が両側(+y軸及び−y軸方向)へ一律に拡大する台形状をなし、非反射領域14a,14d,14eと反射領域14b,14cとの境界となる境界線が少なくとも相互に平行な平行直線と、この平行直線に対して傾斜した少なくとも2本の傾斜直線とを含む。
(もっと読む)
三次元画像処理方法、三次元画像処理装置および三次元画像処理プログラム
【課題】 高価で特殊な装置や、難しい測定条件を必要としない、三次元画像処理方法、三次元画像処理装置および三次元画像処理プログラムを提供する。
【解決手段】 本発明の三次元画像処理方法および三次元画像処理装置では、対象物体に光を投影してこの対象物体を撮影して得られた画像情報に基づいて前記対象物体の表面各部の法線方向を示すデータを取得し、このデータを用いて前記対象物体の表面属性を推定することとする。本発明では、対象物体上に複数個の特徴点を決め、これらの特徴点を含む、撮影角度の異なる複数の二次元画像情報から、特徴点の法線方向のデータを得る。これを用いて対象物体の色・光沢・輝度などの表面特性を高精度に表す、三次元画像を得る。
(もっと読む)
接地点推定装置、接地点推定方法、動線表示システムおよびサーバ
【課題】被写体の影や被写体の周囲の物体の存在にかかわらず、被写体の接地面における接地点や被写体の移動する動線を、正確に推定する接地点推定装置、接地点推定方法、動線表示システムおよびサーバを提供する。
【解決手段】 複数のカメラ6〜8で撮影された被写体の複数の画像を記憶する記憶手段2と、被写体が接している接地面よりも所定分だけ高い位置にある仮想の補助平面を設定する設定手段3と、複数の画像の各々に含まれる各被写体同士の重複する重複領域であって補助平面における重複領域を、重複点として検出する検出手段4と、重複点に基づいて、被写体の接地面における接地点を推定する推定手段5と、を備える。
(もっと読む)
3D撮像システム
目的物表面の三次元モデルを計算する装置・方法を開示する。少なくとも一の指向性エネルギ源が目的物を指向的に照射する。相互に相対して固定位置で少なくとも二の空間的に離れたビューポイントを有する撮像アセンブリは目的物がエネルギ源で照射されると個々のビューポイントにおける目的物の一連の画像を記録する。所定形状フィーチャを有する少なくとも一のテンプレートは目的物と同時にビューポイントに対し可視である。ビューポイントにて記録された画像は分析され一連の画像内の個々の画像に対してテンプレートに相対する個々のビューポイントの位置及びポーズを判別する。目的物に対する測光データはビューポイントの計算された位置及びポーズと画像データを用いて生成される。目的物の初期の三次元モデルを含む形状データは光学三角測量を用いてステレオスコープ復元を実行して生成される。形状及び測光データは組み合わされ三次元モデルを構築する。 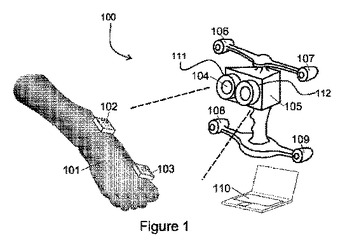 (もっと読む)
(もっと読む)
画像入力方法および画像入力装置
【課題】装置の小型化および検出精度の向上を図ることが可能な画像入力方法および画像入力装置を提供する。
【解決手段】画像入力装置は、定型の検査媒体を所定の方向に沿って搬送する搬送機構10と、検査媒体の表面に光を照射する照明装置16と、反射角θ1、θ2の受光軸を有し、検査媒体からの反射光をそれぞれ撮像する第1および第2撮像系11、12と、第1および第2撮像系から得られた検査媒体の形状情報、印刷パターン情報に基づいて検査媒体の位置変位を検出し、その位置変位情報から検査媒体の3次元情報を生成する変位検出部13と、変位検出部により求められた3次元情報に基づいて変位を復元する画像処理部14と、画像処理部により得られた画像に基づいて、検出媒体の認識処理を行う認識処理部15と、を備えている。
(もっと読む)
粒子径測定装置および測定方法
【課題】測定のための受光量を簡単な装置構成で増やすとともに迅速な測定が可能にする。
【解決手段】偏光板に挟まれたサンプル11中の測定対象粒子に光を照射する照明手段13と、サンプル11の光照射側とは反対側に配置され照明手段13の照明光により発生する測定対象粒子からの散乱光を測定する光測定手段15と、測定された散乱光の情報から測定対象粒子の粒子径を求める粒子径算出手段17とを備えた。この照明手段13は、サンプル11の被測定領域に対する光照射角度の範囲を変更する機能を有する。
(もっと読む)
3次元形状データの生成方法および装置ならびにコンピュータプログラム
【課題】3次元測定器と回転台または回転台と対象物のいずれかの位置関係を変更した場合でも、変更前に得た3次元データと変更後に得た3次元データとを可能な範囲で自動的に位置合わせして繋ぎ合わせること。
【解決手段】新たに測定した3次元データDT4を測定済みの3次元データDT1〜3と繋がるように座標変換して位置合わせすることによって3次元データDT4についての位置合わせのための変換情報Mを取得し、変換情報Mに基づいて得られる3次元データDT4と3次元データDT1〜3との位置合わせの誤差がしきい値TH以下であるか否かを判断し、位置合わせの誤差がしきい値THであるときに、3次元データDT4に対して回転台3を回転させることのみによって測定して得られる3次元データDT5〜6に対し、回転台3の回転角度θについての情報と変換情報Mとを用いて3次元データDT1〜3との位置合わせを行う。
(もっと読む)
距離測定装置及びそのプログラム
【課題】精度の高い測定を優先した距離測定を簡単な操作で行なうことができる距離測定装置及びそのプログラムを提供する。
【解決手段】画像を取得すると、特徴点評価値が所定の範囲内である点を特徴点として検出し、得られた特徴点を示す情報を●マーク(601)を、現左右カーソルにて選択している特徴点は■マーク(610)を付けてLCDモニタ4上に基準画像とともに図6(a)のように表示し、表示された特徴点を示す情報から1つを左右カーソルの移動及びセットキーの操作により選択すると図6(b)で示されているように第1の選択点620として表示する。次に検出する特徴点評価値が所定の範囲内を変更し、変更した範囲内で検出された特徴点を●マーク(602)にて図6(c)のように表示させ、第1選択点と同様に第2選択点630を選択し、図6(d)のように表示させ、選択された2点間の距離を測定し、図6(e)のように表示させる。
(もっと読む)
一致度計算装置及び方法、プログラム
【課題】入力画像の対象物対応領域がテンプレート画像の対象物領域と比べて変形している場合や、入力画像にノイズが重畳している場合でも、対象物を正しく検出することができる(検出したかどうかの判断が可能となる)一致度を計算する。
【解決手段】入力画像と、対象物のテンプレート画像とを対比し、入力画像とテンプレート画像との一致度を計算する一致度計算装置であって、入力画像を、テンプレート対象物領域と整合するように変形する変形手段と、変形後の入力画像とテンプレート画像との一致度を計算する手段とを備え、前記変形手段は、入力画像の対象物対応領域において、テンプレート対象物領域の形状に合わせて非背景領域を整形する手段と、入力画像の対象物非対応領域において、テンプレート対象物対応領域に接する非背景領域を、前記一致度に影響を与えないように設定する処理手段と、を備える。
(もっと読む)
三次元形状計測システムおよび三次元形状計測方法
【課題】搬送中の振動による誤差を補正する。
【解決手段】三次元形状計測システム1は第1基準物11および第2基準物22を備えている。三次元形状算出部18bは、測定対象物10とともに搬送される第1基準物11および第2基準物22の像の形状に基づいて、測定対象物表面による反射光の像の形状を式(3)を用いて補正する。このように、測定対象物10とともに搬送されるものの形状に基づいて補正を行うことにより、本発明によれば、搬送の前後段で配置された例えば生産機械の振動による時間的なデータずれを補正することができる。
(もっと読む)
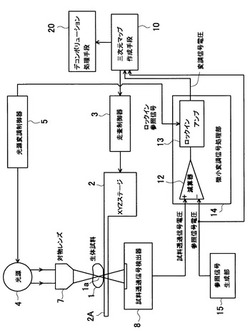
光学的計測装置
【課題】複数の波長の光源による干渉像の位相の組み合わせ計測を、平面画像一枚のみの撮像で解析可能とする。
【解決手段】観測光と参照光を含む複数の波長の光を発生する光発生手段と、該光を干渉可能な状態で撮像手段に導く光学系と、計測面の2次元干渉画像を撮像する撮像手段と、上記計測対象物の計測面の高さ毎の各波長光の位相の理論的組み合わせに基いて上記対象物の計測面の微小高さを求める画像解析手段とを備えるとともに、上記撮像手段を計測面に対して相対的に所定の傾斜角を持たせて設置することにより、干渉縞を生じさせ、該干渉縞の濃淡の変化パターンを観測することにより、上記計測対象物の計測面の微小高さを計測するようにした。
(もっと読む)
標線位置測定装置、標線位置測定用プログラム、および標線マーク
【課題】従来は、白黒の標線マークをビデオカメラで撮像しているので、撮像素子間の補間計算まで行って測定分解能を高めることはできなかった。
【解決手段】標線マークM1には、X座標=0を挟んで±πの範囲内に連続した黒色濃度分布が、上下対称に印刷されている。その対称軸は、標線G1と一致している。ビデオカメラ6で標線マークM1を撮影し、コンピュータ8により標線位置を算出する。
(もっと読む)
401 - 420 / 881
[ Back to top ]