
Fターム[2F069BB24]の内容
測定手段を特定しない測長装置 (16,435) | 測定対象物の種類 (1,053) | 路面 (23)
Fターム[2F069BB24]に分類される特許
1 - 20 / 23
路面凹凸評価システム
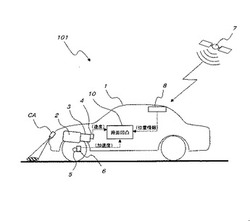
【課題】路面の凹凸評価或いはそれに必要な計測を行うことが出来、路面の凹凸評価或いはそれに必要な計測を行う車両の走行速度の変動に対処することが出来る路面凹凸評価システムの提供。
【解決手段】車両(1)に搭載された路面凹凸評価装置(10)と、当該車両(1)の車速を計測する速度センサ(4)と、当該車両(1)の垂直方向(上下方向)加速度を計測する加速度センサ(6)と、衛星(7)からの信号に基づいて当該車両の現在位置の情報(位置情報)を取得する装置(GPSレシーバー8)を備えている。
(もっと読む)
移動体の障害認識方法及び障害認識システム

【課題】精度良く障害を認識することができる移動体の障害認識方法を提供する。
【解決手段】本発明の一形態に係る移動体の障害認識方法は、移動体の障害認識方法であって、移動体の路面データ取得手段で少なくとも高さデータを含む路面データを取得するステップと、取得した路面データを高さ順に並べ替えるステップと、並べ替えた路面データの変化点を抽出するステップと、変化点を境に障害を認識するステップと、を備える。これにより、精度良く障害を認識することができる
(もっと読む)
車両の路面傾斜角算出装置
【課題】本発明は、バラツキを抑え、精度良く路面の傾斜角を算出することのできる車両の路面傾斜角算出装置を提供することにある。
【解決手段】車速センサで検出される現在の車速Vが所定車速V0以下であれば(S14)、車速V、ブレーキ圧センサで検出されるブレーキ油圧P、走行負荷トルク検出部で検出される走行負荷トルクT及びタイマで計測される時間Sを積算し、車速積算値Vtotal、ブレーキ油圧積算値Ptotal、走行負荷トルク積算値Ttotal及び計測時間Stotalを算出し(S16)、車速センサで検出される現在の車速Vが0km/hで車両が停止したところで(S18)、車速積算値Vtotal、ブレーキ油圧積算値Ptotal、走行負荷トルク積算値Ttotal及び計測時間Stotalより坂路傾斜角θを算出する(S20-S32)。
(もっと読む)
路面状態測定方法、路面状態測定装置、およびコンピュータプログラム
【課題】段差や凹凸という路面状態を高い精度をもって測定できるようにすること。
【解決手段】荷重センサ111に所定重量の錘113で荷重をかけた状態のセンシング装置112を搭載した車両を走行させ、所定のサンプリング間隔毎に荷重センサ111の出力を記録し、これに対応させてその記録位置の位置情報を記録する。錘113の重力による荷重のみがかけられた状態の荷重センサ111の出力を静止荷重と観念し、車両走行中の荷重センサ111の出力を衝撃荷重と観念し、静止荷重に対する衝撃荷重の値の変化を求め、これを位置情報に関連付けて表示するようにした。
(もっと読む)
走行路面形状測定データの処理方法
【課題】同一波長の走行路面変位が繰り返し連続する区間を効率的に管理するための、走行路面形状測定データの処理方法を提供する。
【解決手段】地点xにおける走行路面変位の測定波形f(x)を求め、この測定波形f(x)に波長λの正弦波が繰り返し現れる場合、その繰り返しを検出するために、次式(A)を用いてF(x)を算出し(Mは想定する繰り返し数であるが、処理後、前記波形F(x)の直流分を残すために、Mは偶数とする。α(N)は、ユーザーが定める係数である。)、この結果に基づいて繰り返しを考慮した、走行路形状の管理値を判定する。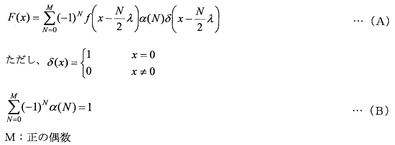 (もっと読む)
(もっと読む)
三次元道路中心線データの生成方法およびその装置
【課題】三次元走行軌跡をもとに三次元道路中心線データを自動生成する。
【解決手段】道路走行時に取得した位置センサの走行軌跡を、平面線形として生成された平面走行軌跡から、制御点検出手段は制御点を検出し、平面線形の生成において円弧検出手段が制御点に関連して円弧を検出し、縦断線形の生成においては放物線検出手段が放物線に近似させた円弧を検出し、平面線形の生成においては緩和曲線検出手段が円弧につながる緩和曲線を検出し、直線検出手段は前記検出した制御点、円弧、緩和曲線から直線を検出するから、これらの制御点、円弧、緩和曲線、直線をつないだ線を平面線形、縦断線形の中心線として滑らかに生成することができる。
(もっと読む)
路面バンク角推定装置
【課題】車輪に路面から作用する力を検出するための力センサを必要とすることなく、安価な構成で、路面のバンク角を安定に推定する。
【解決手段】車輪と路面との間の摩擦特性モデルを含む車両モデルを用い、水平面上での車両横力モデル推定値Fgy_total_estmを求めると共に、これを車両質量mで除算してなる横加速度モデル推定値Accy_estmを求める手段と、横加速度モデル推定値Accy_estmと横加速度センサ15の出力が示す横加速度検出値Accy_sensとの偏差を求める手段と、該偏差から路面のバンク角の暫定推定値を求め、該暫定推定値をハイカット特性のフィルタに通すことにより路面のバンク角推定値θbank_estmを求める手段とを備える。
(もっと読む)
バンク角制限装置
【課題】車両の挙動量が大きく変化する場合、あるいは、カーブが逆バンクである場合に、推定バンク角を制限して、該推定バンク角の値が不安定に陥らないようにする。
【解決手段】バンク角制限装置10Aは、ローパスフィルタ16を備えるローパスフィルタ部12と、車両の挙動量が所定の閾値よりも大きいか否かを判定する車両挙動判定部14とを有し、ローパスフィルタ部12は、前記挙動量が前記閾値よりも大きいと車両挙動判定部14が判定したときに、前記車両に搭載されたバンク角推定装置が推定した路面の推定バンク角をローパスフィルタ16を介して出力し、一方で、前記挙動量が前記閾値以下であると車両挙動判定部14が判定したときに、前記推定バンク角を直接出力する。
(もっと読む)
路面平坦性測定装置
【課題】 IRI算出において予め定められた測定区間長内で試験車の走行速度が変化してもそれに対応することを容易にすると共に、時々刻々の速度変化毎に速度補正ができるようにして、より精度の良い測定を可能にすること。
【解決手段】 本発明の路面平坦性測定装置は、試験車の車軸側(またはサスペンション下側)に位置する加速度計1と、サスペンションが支持する車体側(またはサスペンション上側)に位置する加速度計2と、試験車の走行速度を測定するためのGPSレシーバ3と、測定データを収集して一時記録する収録装置4と、測定データからIRI(国際ラフネス指数)を算出するパーソナルコンピュータ(以下、「PC」と略称する)5と、を備える。PC5は、各機器の制御とIRIの算出とを各々別タスクで制御し、タスク間の測定データの受け渡しはファイル及び共通(グローバル)変数で行う。
(もっと読む)
変状計測装置
【課題】従来の光式変位センサや電気式変位センサ(伸縮センサ)を用いて、これらの伸縮計の機構を変えることなく低コストかつ簡便な機構と1台の一軸方向検出変位センサで2区間の変位を計測し、また、少ない台数で多数区間の変位箇所を特定する面的変状計測装置を提供する。
【解決手段】2つの移動杭の変位状態を計測する装置において、固定杭に固定された一軸方向検出変位センサと、同変位センサに繋がれた接続線と同接続線の一端に設けた変位伝達機構と、両端がそれぞれ前記各移動杭に連結され中途が前記の変位伝達機構に揺動もしくは摺動自在に張設され且つ移動杭の変位に追従して非伸縮状態で全体移動自在に張設された計測線とから構成されたことを特徴とする。
(もっと読む)
変位計、およびそのデータ集録方法
【課題】センサー部を順番に設置して複数箇所の計測データをモニター部で集録して全体の変位を計測する変位計において、計測データ処理順番の誤りを低減した変位計を提供すること。
【解決手段】センサー部3とモニター部1と接続線2a、2bからなる変位計において、電源供給手段7の起動信号兼電源を供給してセンサー部が順次起動するようにして、起動時には後続のセンサー部を開放にした通信をおこない、また、複数のセンサー部がモニター部に計測データを順次送信するようにした。
(もっと読む)
床面検出システム、移動ロボット及び床面検出方法
【課題】正確に床検出を行うことが可能な床面検出システム、移動ロボットや床面検出方法を提供すること。
【解決手段】本発明にかかる床面検出システムは、移動ロボット1に設けられている。まず、姿勢角センサ13の検出した姿勢角データに基づいて複数のセンサ角度候補を設定する。次に、複数のセンサ角度候補のそれぞれについて距離画像センサ12の検出した距離画像データに基づいて床検出を行う。そして、複数のセンサ角度候補のうち、最も多く床検出された候補を、当該床面に対する距離画像センサの角度として選択する。
(もっと読む)
鞍乗型車両、および鞍乗型車両の傾き検出装置
【課題】適切に車両の傾きの状態を検出することができる自動二輪車を提供する。
【解決手段】自動二輪車には、車体の進行方向左右の路面Rまでの距離を測定するセンサであって、モーターサイクルの下方向に向けて取付けられる下方距離センサ(左)LL、および下方距離センサ(右)LRと、進行方向左右の路面Rまでの距離を測定するセンサであって、下方距離センサLL,LRよりも外側に向けて取付けられる側方距離センサ(左)SL、および側方距離センサ(右)SRとが設けられている。下方距離センサ(左)LL、および下方距離センサ(右)LRの測定値に基づいて、車両のバンク角θBが算出される。バンク角θBが所定範囲内になければ、側方距離センサ(左)SL、および側方距離センサ(右)SRにより転倒の可能性が判定される。
(もっと読む)
路面性状測定方法
【課題】安価で且つ少ない作業手間と時間で路面性状を測定できる路面性状測定方法を提供する。
【解決手段】路面の補修を行う基準となる路面の平たん性σ、わだち掘れ深さD、ひび割れ率Cを測定する路面性状測定方法において、振動測定器2を搭載した車両3を一定速度で走行させて、被測定路面1の所定の区間内での振動数を検出して、その振動数から、予め形成された振動数に対する平たん性の相関表に基づいて前記区間内の平たん性σを決定することで、平たん性σを測定する。
(もっと読む)
路面状態判定装置及び路面状態判定方法
【課題】従前の路面状態判定基準が適用できなくなった場合でも,誤判定を回避するような路面状態判定装置を提供する。
【解決手段】路面状態判定装置において,走行音を取得する走行音取得部と,走行音ごとに路面状態を対応付けた路面状態判定基準を格納した記憶部と,地図情報に路面の舗装種別を対応付けて記憶した自車位置検出部から走行路面の舗装種別を検出する舗装種別検出部と,検出した舗装種別に応じた路面状態判定基準を用いて取得した走行音に対応する路面状態を判定する路面状態判定部と,走行路面の路面状態を外部の情報源から取得する路面状態取得部とを有する。そして,判定した路面状態と取得された路面状態が異なる場合は,走行路面の舗装種別が路面状態判定基準において当該走行音と取得された路面状態により特定される舗装種別となるように,舗装種別検出部の記憶内容を変更する。
(もっと読む)
路面性状測定装置
【課題】一台でキメ深さやIRIを測定できる多機能の路面性状測定装置であって安価かつ高精度なものを車載可能とすべく、移動距離計の測定値からタイヤ変形等の悪影響が取り除かれるようにする
【解決手段】車両に移動距離計15と高さ計16と高さ計51と演算部20とを搭載する。高さ計16,51には、排水用凹部の開口幅より短い第一基準長Nに対応した狭い範囲を測定するものを、採用する。演算部20は、移動距離測定値ΔSと高さ測定値K,Jとに基づき踏面算出を行って第二基準長M対応のIRIを算出し、移動距離測定値ΔSと高さ測定値Kとに基づき踏面算出を行わないで第一基準長N対応のキメ深さ等を算出し、更に基準長Mだけ離れた高さ計16,51での路面形状について相関を算出して選択的に移動距離測定値ΔSを校正する。
(もっと読む)
路面角度の算出装置及び算出方法
【課題】 車体に設置された加速度センサから得られる加速度情報から速度を算出する上で、車速パルスを用いることなく路面角度を算出し、速度の精度を高める。
【解決手段】 車体に設置された加速度センサ1から得られた、路面に平行な加速度成分Axと路面に垂直な加速度成分Azの値から路面角度αを算出する角度算出手段4と、前記AxとAzの値から重力加速度をgとして│Ax2+Az2−g2│の値を計算する第一演算手段2と、前記│Ax2+Az2−g2│の値が正であり、且つある設定値T1より小さいか否かを判断する第一比較手段3とを備え、第一比較手段3の判断の結果、前記AxとAzが0<│Ax2+Az2−g2│<T1の条件を満たしていれば、算出直後の路面角度αを旧路面角度に代わって更新する。
(もっと読む)
バンク角推定装置
【課題】ヨーレートや横加速度を用いることなく、路面のバンク角を推定する。
【解決手段】検出部22は、車輪5に作用する横力Fyと上下力Fzとを直接的に検出する。推定部21aは、横力Fyに基づいて、車両の横方向に作用する車両横力FYを推定し、上下力Fzに基づいて、車両の上下方向に作用する車両上下力FZを推定する。そして、車両横力FYと車両上下力FZとを演算パラメータとして用いて、車両横力FYに対する車両の遠心力と重力とのオフセット量と、車両上下力FZに対する車両の遠心力と重力とのオフセット量とに基づいて、路面のバンク角θを推定する。
(もっと読む)
道路線形自動測量装置
【課題】いかなる環境下であっても、自車両の位置及び走行している道路の曲率を自動的に得ることができる道路線形自動測量装置を得る。
【解決手段】複合慣性測量部3がGPS衛星及びGPS基準局10からの電波を受信できる道路では、GPS信号及びGPS補正信号に基づく移動車両7の位置データに基づいて加速度の誤差、角速度の誤差、姿勢角の誤差、慣性位置の誤差、慣性速度の誤差を逐次推定し、また、GPS衛星及びGPS基準局10からの電波を受信できない道路では車速計5からの速度に基づいて各誤差を推定する。そして、データ処理部が複合慣性測量部3からの位置、方位角、姿勢角に基づいて道路の曲率半径、縦横勾配を求めて表示又は蓄積する。
(もっと読む)
路面状態測定システム及び路面状態測定装置
【課題】 舗装路面上の複数の測線について測定を行い、路面のテクスチャ評価の信頼性向上を図った路面状態測定システムを提供する。
【解決手段】 路面状態測定システム1は、路面までの距離を計測するレーザ変位計11と、レーザ変位計11を測線に沿って走査させるステッピングモータ120A、レール12A、12B、ボールネジ121A、取付部材13A、13Bと、測線に直交する方向にレーザ変位計11を移動させるステッピングモータ130、レール13、ボールネジ131及び取付部材11Aとを有している。それにより、レーザ変位計11を2次元的に平行移動させながら複数の測線について測定を行うことができる。また、複数の測線上の測定結果から算出される複数のMPD等のテクスチャ評価値の平均値を求めることで、テクスチャ評価の信頼性向上が図られる。
(もっと読む)
1 - 20 / 23
[ Back to top ]