
Fターム[3F072GD01]の内容
Fターム[3F072GD01]に分類される特許
21 - 40 / 116
計数機
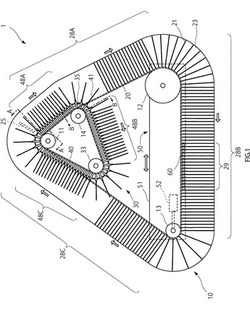
【課題】高速運転を確保しつつ、回転コンベアの収容空間へ確実に製品を収容することが可能な計数機を提供する。
【解決手段】本実施形態に係る計数機1は、所定の周回経路上で周回する周回部材20と、周回部材20に所定の間隔で設置された多数の仕切部材21とを有し、製品供給部25に落下してくる製品を仕切部材21間の収容空間に一枚ずつ収容させて搬送する回転コンベア装置10と、製品排出部29において所定の枚数単位で製品を押し出して排出する押出部材60と、周回経路と製品供給部25において上側で重なると共に製品排出部29において離れる所定の補助周回経路上で周回する補助周回部材40と、補助周回部材40に仕切部材21と同じ間隔で設置された多数の補助仕切部材41とを有し、補助仕切部材41が製品供給部25において仕切部材21の上側を同期して通過する補助装置30と、を備える。
(もっと読む)
食品搬送システム

【課題】搬送用ロボットを使用して食製品を搬送する搬送システムを提供する。
【解決手段】食製品製造装置3によって製造された食製品5を搬送する食製品搬送手段7と、前記食製品5をを搬送する別個の搬送手段13と、前記食製品搬送手段7から前記別個の搬送手段13へ食製品を搬送する搬送用のロボット15を備えた食品搬送システムであって、前記ロボット15は、前記食製品5を保持する保持面77を備えた複数の保持部材63A〜63Fを開閉自在に備え、かつ前記各保持部材63A〜63Fの前記保持面77を清掃するための清掃手段を、前記ロボットのロボットハンド19に、又は前記ロボットの周囲の適宜位置に備えている。ロボットハンド19に装着して補助作業を行うための複数の補助作業具103を、前記ロボットハンド19に着脱交換自在に備え、前記ロボットハンド19に対して着脱交換するための複数の補助作業具103A〜103Cを備えた補助作業具交換部を備えている。
(もっと読む)
包装機における物品供給装置
【課題】ロボットを用いて物品を高速で搬送する包装機における物品供給装置を提供する。
【解決手段】定速回転する回転体12に所定の角度間隔で支持されるアーム20を有していて、回転体12が回転中において前記アーム20を回動させて、物品を吸着した吸着具25を、前記支持位置より前記回転体12の中心に近づけてから、該吸着具25を第2コンベヤ2の搬送方向に向けて移動させて物品を載置した後、該物品を載置したときの前記回転体の中心と支持位置16とを結ぶ線分に対するアームの角度より大きく広がるようにアーム20を回動させて、前記物品保持領域物品の物品を吸着する。
(もっと読む)
箱詰め装置
【課題】 物品の箱詰めを高速に行うことができる箱詰め装置を提供すること。
【解決手段】 一時保持装置40は、箱検知器66が箱詰め位置Pに箱が位置したことを検知しない限り、第3及び第4の羽根車41、42のある一対の羽根上に投下装置20から投下された物品を受け取って保持し、箱検知器66が箱詰め位置Pに箱が位置したことを検知すると、該第3及び第4の羽根車41、42のある一対の羽根上に保持した物品を投下するよう構成されている。
(もっと読む)
容器搬送装置
【課題】袋本体と首部とを有する複数の容器を整列された状態で箱詰めすることが可能な容器搬送装置を提供すること。
【解決手段】袋本体と首部とを有する容器Cを搬送する容器搬送装置Aであり、容器Cを供給する製袋機1、複数の容器Cを受け渡し位置P1まで順次搬送する入り側コンベア2、容器Cを受け渡し位置P1x方向に沿って受け渡し位置P2まで搬送する中間コンベア4、受け渡し位置P1に設置され、入り側コンベア2によって搬送されてきた容器Cを、首部がy方向の一方側および他方側のいずれかを向く姿勢に整列された所定数の容器Cごとに区分して中間搬送コンベア4へ受け渡す整列手段3、受け渡し位置P2に箱Bを順次搬送し、容器Cが詰められた箱Bを排出する出側コンベア6、第2の受け渡し位置P2に設置され、中間コンベア4により搬送されてきた所定数の容器Cを、出側コンベア6により搬送されてきた箱Bに詰める箱詰め手段5、を備える。
(もっと読む)
移載装置及び移載方法並びに物品仕分け設備
【課題】従来よりも移載処理能力が向上した移載装置及び移載方法並びに物品仕分け設備を提供する。
【解決手段】
複数の物品が品種ごとに分けられてそれぞれ収容された複数の実ケースから、物品を移載して収容する仕分けケースを搬送するロボットプレースコンベヤ41と、物品を実ケースから仕分けケースに移載するロボット40と、を備えた移載装置69であって、実ケースを搬送する実ケース搬送コンベヤ25から供給された複数の実ケースを往復動させる往復動コンベヤ70を備え、往復動コンベヤ70を動作させて、移載対象となる物品をロボット40の動作範囲内に移動させる。
(もっと読む)
小袋投入装置
【課題】搬送コンベアと投入先とを離隔して製品への異物混入が防止でき、デッドスペースが少なく、連包パウチのカット位置が安定して傾きのない安定したカットラインが得られる、小袋投入装置を提供する。
【解決手段】小袋投入装置の搬送ライン20において、第1の搬送コンベア26で連包パウチ10を搬送部材26u・26dで上・下から挟み込んで水平方向に間欠的に搬送しる、前記カッター部28で、前記第1の搬送コンベア26によって搬送された連包パウチ10を搬送一時停止時に横シール部10aを切断して個々の小袋12に分け、第2の搬送コンベア30で、切断された各小袋12を載置して搬送し、吸着ユニット34で、前記載置台32上の小袋12を先端の吸引パッド34cで吸引して、前記搬送ライン20に平行かつ下方に位置し容器投入ライン36上を搬送される容器14内に投入する。
(もっと読む)
箱詰め装置
【課題】簡単かつ安価に製造することができるとともに、収納箱内における物品の整列状態を安定させることができる箱詰め装置を提供する。
【解決手段】箱詰め装置は、一対の第1羽根車60と、一対の第1羽根車60を互いに逆方向に回転させる第1回転手段とを有する第1羽根車装置42を備え、一対の第1羽根車60のそれぞれの第1羽根66は、複数の物品14のうちの1つを支持する第1支持部74と、他の1つを第1支持部74よりも供給方向の前方において支持する第2支持部84とを有しており、第1支持部74および第2支持部84は、回転軸L1に対して交差する方向において段差88を有するように2段に構成されており、第1羽根66が複数の物品14を支持する回転位置にあるとき、第1支持部74が第2支持部84よりも下方に位置する。
(もっと読む)
ワークの外観検査装置およびワークの外観検査方法
【課題】搬送テーブル上でワークを正確に位置決めすることができ、かつワークに対する静電破壊や特性劣化を生じさせることのないワークの外観検査装置を提供する。
【解決手段】ワークの外観検査装置30は、6面体形状のワークWを搬送するリニアフィーダ1と、リニアフィーダ1からのワークWが移載されて搬送される搬送テーブル2と、リニアフィーダ1からのワークWを搬送テーブル2上に移載して整列させる移載整列手段21と、搬送テーブル2の下面を帯電してワークWを保持する帯電手段6Aと、ワークWの6面を撮像する撮像手段20とを備えている。移載整列手段21は、リニアフィーダ1と搬送テーブル2との間に位置する無振動部4と、ワークWを整列させる整列ガイド7とを有している。整列ガイド7は平面からみて直線状をなすガイド面7aを含む。
(もっと読む)
チューブの箱詰め装置、箱詰め方法及びチューブの箱詰め装置用作業ハンド
【課題】ロボット等でチューブの箱詰め動作を自動化するにあたり、不用意なチューブの抜き出しを確実に発見できる技術を提供する。
【解決手段】箱詰め装置は、ロボットにより作業ハンド16を移動させてチューブTを箱詰めする。チューブTは予め物品列TAの状態で整列されており、作業ハンド16は各フィンガ18にチューブTを引っ掛けた状態で物品列TAを保持し、収容箱14内に箱詰めする。両側のフィンガ18にはそれぞれ内部にフォトセンサ24が収容されており、その間のフィンガ18には径方向に貫通孔が形成されている。フォトセンサ24の検出光Lは貫通孔を通って一方から投光され、他方で受光される。箱詰め後に作業ハンド16を退出させてフォトセンサ24による検出を行い、チューブTが残存しているか否かを自動的に検出する。
(もっと読む)
包装済石英ガラスルツボ用クレーン装置およびこの装置を用いる包装済石英ガラスルツボの梱包方法
【課題】包装済ルツボのハンドリングを人手に頼ることなく機械を介して実現する、包装済ルツボのハンドリングに適したクレーン装置を提供する。
【解決手段】包装済の石英ガラスルツボを配置した吊り上げ場所の上方と梱包用コンテナを配置した吊り降ろし場所の上方との間の経路上を往復動可能に、かつ該経路から前記吊り上げ場所および吊り降ろし場所のそれぞれにおいて前記経路に対して昇降可能に設置されるクレーン装置であって、前記昇降方向に延びる4本のアームを有し、該4本のアームを四角形の頂点に配置するとともに、該四角形の対角線上のアーム対を相互に進退可能に設け、各アームは先端に前記アームの進行方向に延びる爪を有するものとする。
(もっと読む)
吸着移送装置
【課題】吸盤で被吸着物のラベル貼着部分を吸着しても、ラベルが剥がれて吸い込まれることがなく、吸着することによってラベルを確実に被吸着物に貼り付けることが可能で、被吸着物の大きさの変化に対応できる吸着移送装置を提供すること。
【解決手段】表面にラベルが貼着された球形の被吸着物を吸着する吸盤4の内部に、下端にラベル当てパッド16を設けた伸縮部材11を、ラベル当てパッド16が吸盤4の開口部13に臨むよう配設し、伸縮部材11は、ラベル当てパッド16を押し上げる力により吸盤4の軸方向に縮み、ラベル当てパッド16を下方に向けて付勢する。
(もっと読む)
包装物品ハンドリング装置
【課題】包装物品を刺身の盛り付け状態のように並べるのに適した包装物品のハンドリング装置を提供する。
【解決手段】物品をピロー袋2に封入した縦横に比べて厚さの薄い包装物品1を、搬入コンベア10上に1列に並べて搬入する。移載ロボット30により三次元移動するピッキングヘッド20には、包装物品1を1個ずつ吸着する吸着具22が複数個、1列に並べて配置されている。制御装置31は、吸着具22を、搬入コンベア10上の包装物品1の中で、包装物品1の並びの方向において一方に偏った箇所に当て、吸着具22に真空吸引力を働かせる。ピッキングヘッド20を上昇させると、包装物品1は吸着具22から斜めに垂れ下がる。吸着具22の間隔を縮めると包装物品1同士に重なりが生じるので、その状態の包装物品1を目的地に置く。
(もっと読む)
姿勢制御装置
【課題】包装物を効率よく収納させる姿勢に制御させる姿勢制御装置を提供することである。
【解決手段】姿勢制御装置400においては、第1保持板410、第2保持板430を有する。第1保持板410、第2保持板430、第3保持板、一対の開閉装置440,441により略直立姿勢で集積された包装物800が集積方向の両側から保持される。また、包装物800をダンボール箱内に箱詰めする前に振動装置460により第1保持板410が矢印MV1の方向に往復移動され間隔が変動される。
(もっと読む)
物品移載装置
【課題】キャリアに収容された容器を整列状態で搬送する第1コンベヤから、複数の保持手段を備えた移載手段によって容器を保持して第2コンベヤに移載する物品移載装置において、第1コンベヤの容器に欠落があった場合に、ストック部にストックした容器を補給する。
【解決手段】検知手段18によって第1コンベヤ6上の容器4に欠落があったことを検出すると、複数の保持手段のうち、この欠落した位置の容器4を保持する保持手段を特定する。移載手段20を前記ストック部12に移動させ、特定された保持手段に容器4を保持させた後、その他の保持手段には、第1コンベヤ6上の容器取り出し位置Tに停止している容器4を保持させ、全ての保持手段に保持されている容器4を第2コンベヤ10のケース8内に挿入する。
(もっと読む)
ワーク移載装置、ケーサーシステム、およびワーク移載方法
【課題】ワークにストレスをかけることなく、かつ高速で効率よくワークをケースに移載できるワーク移載装置、ケーサーシステム、およびワーク移載方法を提供すること。
【解決手段】フレームに組みつけられたワーク移載装置300であって、チャックユニット10と、チャックユニット10に接続され、第一位置P301におけるワークWの配置に対応する第一形態から第二位置P302におけるワークWの配置に対応する第二形態へとワークWの配列を変換する配列変換部20と、配列変換部20に取り付けられ、第一形態から第二形態へワークWの配列を変換するための駆動力を発する動力源と、この動力源に接続された歯車部材と、フレームに少なくとも一部が固定され、第一位置から第二位置への配列変換部20の移動軌跡を規定し、歯車部材に噛み合う歯が形成された歯付き部材と、を備える。
(もっと読む)
物品保持装置
【課題】物品10を保持する複数のグリップ部材26の相互の間隔を、簡単な構造で拡縮する。
【解決手段】ロボットハンド4に取り付けられるベース部材20に、5本のエアシリンダ22を一列に固定する。一端の第1エアシリンダ22Aは、ベース部材に直角に、その次の第2エアシリンダ22Bから第5エアシリンダ22Eまでを順次傾斜角度が大きくなるように傾斜させて固定する。全てのエアシリンダを収縮させてグリップ部材を上昇させた位置から、第5エアシリンダ22Eを伸張させて第5グリップ部材26Eを下降させて物品を保持した後、上昇させ、第4ないし第1グリップ部材26D〜26Aも順次下降、物品の保持、上昇をさせる。その後、一斉にエアシリンダ22を伸張させてグリップ部材26を下降させ、物品10の相互の間隔を接近させた後バケット14内に挿入する。
(もっと読む)
ワーク移載装置およびケーサーシステム
【課題】ワークにストレスをかけることなく、かつ高速で効率よくワークをケースに移載できるワーク移載装置、ケーサーシステム、およびワーク移載方法を提供すること。
【解決手段】ワークWを第一位置P301と第二位置P302との間で移載するワーク移載装置300であって、ワークWを把持するチャック部11、12、13を有するチャックユニット10と、チャックユニット10に接続され、第一位置P301におけるワークWの配置に対応する第一形態から第二位置P302におけるワークWの配置に対応する第二形態へとワークWの配列を変換する配列変換部20と、配列変換部20に接続され、チャックユニット10を配列変換部20ごと第一位置P301と第二位置P302との間で移動させるワーク搬送部30と、を備える。
(もっと読む)
移載装置およびケーサーシステム
【課題】ワークにストレスをかけることなく、かつ小型で高速にワークをケースに移載できる移載装置およびケーサーシステムを提供すること。
【解決手段】所定の梱包位置である第二位置P302を通過するように連続供給されるケースCにワークWを移載する移載装置であって、ワークWが供給されるマガジン部40と、マガジン部40に供給されたワークWを把持可能な把持体と、前記把持体に把持されたワークWをマガジン部40から空中へと離間させた後に、ワークWを把持した前記把持体を第二位置P302を通過中のケースCへ移送する移送機構30と、を備え、移送機構30は、前記把持体をケースCの移動に追従させてワークWをケースCに案内する追従手段20を有する。
(もっと読む)
棒材のラック挿入方法及びそのシステム
【課題】小ラックに形成されている多数の支持孔に棒材を挿入する棒材のラック挿入工程の短縮化を図る。
【解決手段】棒材のラック挿入システムは、大ラック押出台上の大ラックから、棒材押込機14の押込みロッド15によって押出された棒材26が、小ラック挿入台上の小ラック24の支持孔38に押込まれる際に、短くて奥まで押込まれないときでも、大ラック押出台と小ラック挿入台の間のピンチローラ装置18により、押込みロッド15を更に駆動して、棒材26の先端部27が小ラック24の端部24Aから突出するように押込み、その先端部27を、頭揃え装置20の棒材ストッパ20Aによって一定量押し込み、全ての棒材26の先端を揃える頭揃えを行なう。
(もっと読む)
21 - 40 / 116
[ Back to top ]