
Fターム[3F081CA03]の内容
コンベア上の物品の姿勢制御 (7,432) | 物品反転装置 (498) | 反転機構 (393) | 回転手段 (207) | 搬送方向前後軸(X軸)回り回転筒 (31)
Fターム[3F081CA03]に分類される特許
1 - 20 / 31
農畜産物の洗浄装置
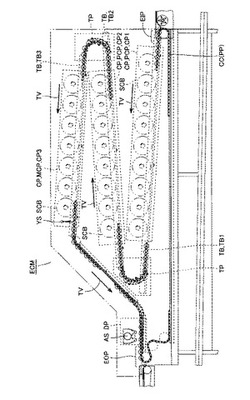
【課題】占有面積の削減が図られる農畜産物の洗浄装置を提供する。
【解決手段】洗浄装置ECMには、鶏卵搬入部EIPと洗浄部CPと乾燥部DPと鶏卵搬出部EOPとが設けられている。洗浄部CPは多段構造とされて、第1洗浄部CP1、第2洗浄部CP2および第3洗浄部CP3は、傾斜の向きが互いに反対の向きになるように傾斜させて、上下方向に配置されている。第1洗浄部CP1、第2洗浄部CP2および第3洗浄部CP3の順に搬送される鶏卵が、第3洗浄部CP3、第2洗浄部CP2および第1洗浄部CP1の順に流れてくる洗浄液としての湯によって洗浄される。
(もっと読む)
キャップ姿勢制御方法およびキャップ姿勢制御機構並びにキャップ姿勢制御装置

【課題】天面を下方に位置させた仰向け姿勢とされたキャップと、天面を上方に位置させた伏せ置き姿勢とされたキャップとが混在して搬送される搬送路において、簡単な構成で確実にキャップを全て一律に仰向け姿勢とすることができるキャップ姿勢制御方法、機構、装置を提供する。
【解決手段】キャップの搬送路10に形成された溝部14を備える反転部13において、該反転部13へ仰向け姿勢で搬送されているキャップは該キャップを搬送する搬送力によりそのまま前記溝部14上を通過させて下流側へ送り、伏せ置き姿勢で搬送されているキャップは該キャップに働く自重により前記溝部14へ搬送方向先端から落下させて前傾させたあと、前記搬送力に基づく慣性力および/または反転のために該キャップに加える外力により、その前傾動作に連続させて、搬送方向下流側へ前転させ、仰向け姿勢に制御して下流側へ送る。
(もっと読む)
箱反転装置
【課題】直線の搬送ライン途中に設置でき、上下逆の状態で搬送されてくるダンボール箱を搬送しながら上下反転して高い処理能力を実現するとともに、シンプルな機構でスペースをとらないダンボール箱反転装置を提供する。
【解決手段】回転ドラム7は、回転円板11,12、及び両円板11,12間において互いに向い合うように配置された一対のベルトコンベア30,31と一対のガイド板40,41とから構成されていて、内部に箱Aの断面形状に合致するような断面略矩形の搬送経路3を形成している。箱Aは、ベルトコンベア30,31が上下位置にあるときに搬送経路3内に進入し、左右面がガイド板40,41で案内されつつ、上下面がベルトコンベア30,31で挟まれた状態で搬送されながら、回転ドラム7が回転することにより反転される。回転ドラム7の出口側において、反転された状態にある箱Aが搬出される。
(もっと読む)
反転装置およびプリフォーム取り扱い装置
【課題】簡単な構造で対象物を反転させることができる反転装置を提供する。
【解決手段】反転装置RMは、支持体78と、支持体に回転軸53回りで回転自在に支持されて、回転軸53の軸方向に第1端52aおよび反対側の第2端52bで仕切られる回転体52と、回転体52上に形成されて、第1端52aから第2端52bまで対象物Pを滑らせる滑り路84、88、89と、第1端52aで滑り路84、88、89の入口に向き合わせられ、滑り路84、88、89の入口に第1姿勢の対象物Pを案内する第1案内路51と、第2端52bで滑り路84、88、89の出口に向き合わせられ、回転体52の回転に応じて第1姿勢から反転した第2姿勢の対象物Pを滑り路84、88、89の出口から案内する第2案内路47とを備える。
(もっと読む)
ガラス板姿勢変換装置及びガラス板姿勢変換方法
【課題】前工程から横姿勢で搬送されるガラス板を縦姿勢に姿勢変換をして次工程に受け渡すという一連の処理を、先行するガラス板から後続のガラス板に亘って的確に行い、無駄な待ち時間を可及的に低減させ、作業時間の短縮ひいては生産性の向上を図る。
【解決手段】横軸2廻りに一方向Aに間欠回転する回転体3の外周部に、ガラス板4を保持する保持部5を複数配列し、回転体3の回転停止時に一の保持部5が受取エリア6で横姿勢のガラス板4を受け取り、その受け取り完了時に回転体3の回転を開始させ、その回転に伴ってガラス板4が縦姿勢で受渡エリア7に位置した時点で回転体3の回転を停止させ、その回転停止時に、一の保持部5が受渡エリア7で縦姿勢のガラス板4を受け渡し可能となると同時に、一の保持部5の回転方向後側に存する他の保持部5が受取エリア6で後続の横姿勢のガラス板4を受け取り可能となるように構成する。
(もっと読む)
被検査部品搬送装置及び搬送方法
【課題】画像処理検査において、無限端ワイヤーでは検査が困難な軸径2ミリ以下のマイクロネジ等の微小な被検査部品を搬送することができ、しかも、無限端ワイヤーを使用しているが如く合理的な使用が可能な被検査部品搬送装置及び搬送方法を提供する。
【解決手段】リールの送り出しがわの搬送ワイヤー1が巻き取りがわに巻き取られるとリールの回転方向が逆転して搬送ワイヤーを巻き戻すように構成された一対の巻取りリール2を設ける。各巻取りリール2から送り出される2本の搬送ワイヤー1を撮影ポイントに導く搬送路3とで搬送装置10を構成する。該搬送装置10を水平方向に180度反転せしめる反転機20に設置する。該反転機20が反転すると、巻取りリール2の逆転で巻き戻される搬送ワイヤー1で被検査部品Pを搬送するように構成する。
(もっと読む)
卵移し替え装置及びこれに用いられる移し替え用卵座
【課題】移し替え用卵座に卵を送り込む際に、安定して卵を受け入れることができ、卵の落下を防止することができる卵移し替え装置を提供する。
【解決手段】複列コンベア1から単列コンベア4へと卵を移し替えるときに用いられる卵座30を備え、卵座30は、平面視でC字状に形成された卵搭載部を備え、卵搭載部は、第1腕部30a、第2腕部30b、連結部30cと、開口部30dとによりC字状に形成され、かつ、第1腕部30aが複列コンベア1に近い側、第2腕部30bが複列コンベア1から遠い側に配置され、かつ、開口部30dが単列コンベア4の進行方向側に配置され、第1・第2腕部30a,30b、連結部30cは、夫々、卵を搭載する部分が卵の外形形状に対応したテーパ面30gを備えており、平面視で、テーパ面30gにおける第2腕部30bの角度θが、開口部30dに行くほど狭くなるように設定され、5゜〜11゜の範囲に設定されている。
(もっと読む)
反転装置
【課題】 搬送物を適切に把持して反転することで安定した上下反転を可能とする反転装置を提供することにある。
【解決手段】 搬送物2が載置されるトレイ3の搬送方向と平行な方向を中心として回転可能に設けられた回転体4と、回転体4内に設けられ搬送物を反転する反転ユニット10とを備え、反転ユニット10は、回転体4に取り付けられ互いに正対するとともに、回転体4が回転することで上下が入れ替わる第1及び第2のコンベヤ体11,12と、トレイを第1及び第2のコンベヤ体11,12上に固定するクランプ部13と、第1及び第2のコンベヤ体11,12を近接離間する方向に駆動するコンベヤ昇降駆動部14と、ガイド部15とを有し、コンベヤ昇降駆動部14は、電動シリンダ41及び空気式ブレーキシリンダ42を有する。
(もっと読む)
アンローダ
【課題】アンローダのコンベアを反転するときに、物品を確実に保持して落下のおそれをなくし、物品の変形も最小限とする。
【解決手段】アンローダは、反転軸11と反転駆動モータ12を有する反転手段と、反転手段の反転軸に設置されたコンベア2と、コンベア2の移送面に接近・離隔するように移動可能なトレー保持手段6を有する。トレー移送手段で運ばれてきた、整列された物品を載置したトレーをトレー保持手段6で保持し、トレー保持手段6をコンベア移送面に接近移動させて物品をコンベア移送面に押接させ、反転手段でコンベア2及びトレー保持手段6を反転し、トレー保持手段6をコンベア移送面から離隔移動させ、コンベア2を作動してコンベア上の物品を排出する。コンベア2の移送面を、長手方向がコンベアの移送方向と直角方向になるように並列された複数の細長い枕状の空気袋3にする。
(もっと読む)
搬送処理方法
【課題】物品の箱出しや箱入れをする際に安全性・安定性・作業性・経済性などを確保することのできる搬送処理方法を提供する。
【解決手段】
出入口22が開放保持された箱21を搬送ラインの箱出し操作部41にて上下反転させる。これで箱21外に出た横長姿勢の物品11を出発走行部51から姿勢変換部61まで搬送する。姿勢変換部61では、横長姿勢の物品11を縦長姿勢に姿勢変換し、それを処理作業部71〜73へ搬送して処理する。処理後の物品11を箱入れ操作部81まで搬送し、ここから箱配置部92側へ押し込む。箱配置部92では、押し込まれた縦長姿勢の物品11を開放状態の出入口22より箱21内に受け入れる。その後、物品入りの箱21を箱配置部92外へ搬送する。
(もっと読む)
パレット載せ換え装置及びパレット載せ換え方法
【課題】搬送物に損傷を与えず、載せ換え作業の前後で搬送物の上下の向きを変化させないパレット載せ換え装置及びパレット載せ換え方法を提案する。
【解決手段】搬送物W及び搬送用平パレットP1、P2を一体として又は搬送物Wのみを保持しつつ正立及び上下反転可能な反転部1を備え、反転部1は、正立時に搬送物W及びパレットP1、P2又は搬送物Wのみを載置する載置部11と、正立時に載置部11との間で搬送物W及びパレットP1、P2を一体として又は搬送物Wのみを挟持すると共に上下反転時に搬送物Wを載置し載置部11から離間する第1保持部15と、載置部11の近傍に配置されて上下反転時にパレットP1、P2を側面から保持する第2保持部21と、上下反転時にパレットP1、P2を第2保持部21による保持位置と反転部1の外部との間で搬送する第1搬送部25とを有するという構成を採用する。
(もっと読む)
多孔質板の自動化生産システム
【課題】ALC板の塗装から塗装処理から検査工程までの搬送やALC板の裏返し工程を自動化して、生産性と安全性を向上させる。
【解決手段】本自動化システムは、上面が塗装されたALC板10をパレットPに載せて送出する搬送ローラ12と、搬出ローラ12上を搬送されて来たALC板10をパレットPから取り上げて、搬送ローラ23上に移送する移送機15を備える。また、反転送出機25を備える。反転送出機25は、ALC板10を上下方向から挟持可能な一対の搬送ローラ26−1,26−2と、一対の搬送ローラの上下関係を反転させる反転機構を備え、搬送ローラ23により搬送されたALC板10を反転機構により裏返すと共に、裏返されたALC板10を、反転により下側になった搬送ローラにより送出する。
(もっと読む)
長尺材の取出装置
【課題】綾となって絡まり合っている長尺材であっても確実に1本ずつ取り出すことができる長尺材の取出装置を提供する。
【解決手段】本発明の長尺材の取出装置10は、所定本数の長尺材Bを並列させた状態で載置可能な載置手段11と、前記載置手段11に載置された長尺材Bが並列方向の移動するのを規制する規制手段34と、前記載置手段11から長尺材Bを1本ずつ取り出す取出手段13と、を備える。載置手段11は、載置した各長尺材を自転させる載置台32を備える。
(もっと読む)
蓄電池用極板分離供給方法及び機構
【課題】極板積層体から極板を分離し、別個に設けた水平ベルトコンベアに搬送供給するに当たり、極板の変形や損傷なく円滑、安定且つ高能率に分離供給することができる極板分離供給方法と極板分離供給機構を提供する。
【解決手段】(a)無端コンベア1aにより搬送される極板積層体2の前端に位置する極板Aを突き上げると共に突き上げられた該極板を、その左右の耳aを左右のすべり枠6に載架転移させて該極板積層体から分離すること、(b)該極板を、該すべり枠をすべり降りる過程で、その左右の耳を支受部材7に当接させる一方、該極板の下端を水平ベルトコンベア8に接触させること、(c)該水平ベルトコンベアの前方への移動に伴い該極板の下端を前方へ移動させ、該支受用部材を支点として該左右の耳を中心に該極板を寝かせる方向に回動傾斜させ乍ら、該すべり枠をすべり降ろし、該水平ベルトコンベア上に転移させ、次の工程へ搬送するようにした。
(もっと読む)
被検査物の搬送装置及び外観検査装置
【課題】 被検査物の外観全体を容易且つ確実に検査できるように被検査物を搬送する被検査物の搬送装置を提供する。
【解決手段】 被検査物の外観検査に用いられる被検査物の搬送装置であって、往動搬送手段21により搬送される被検査物の表裏を反転して、復動搬送手段22aに引き渡す表裏反転手段23を備え、表裏反転手段23は、往動搬送手段21により搬送される被検査物を外周面に保持して回転搬送する第1のドラム231aと、第1のドラム231aにより搬送される被検査物を外周面に保持して回転搬送する第2のドラム232とを備え、第1のドラム231a及び第2のドラム232の少なくとも一方は、外周面に保持した被検査物を回転搬送することにより、往動搬送手段21及び復動搬送手段22aの並列方向に被検査物を移動可能に配置されている。
(もっと読む)
容器スタッカー装置および容器スタッカー方法
【課題】容器を搬送しながら反転することにより反転装置を不要とし、反転不良や落下時の騒音をなくす。
【解決手段】入口コンベア1と、入口コンベア1へ搬入された各々の容器Aを上方へ持ち上げるリフティング装置2と、リフティング装置2の上方に上流端部を位置させ容器Aを個々に搬送しながら反転させる容器反転搬送装置3と、容器反転搬送装置3の下流端部の下方に位置する容器位置決め装置4と、容器位置決め装置4の下方位置に設けられるとともに順次下方へ移動可能な容器段積み装置と、容器段積み装置に段積みされた容器ASを排出する容器排出コンベア6とを有する容器スタッカー装置による。
(もっと読む)
タイルカーペットの連続積層装置および積層方法。
【課題】安定してタイルカーペットを反転し、製造工程のスピードアップにも追随できる生産効率のよい反転装置、およびこの反転装置を用いた連続積層装置を提供する。
【解決手段】回転翼にタイルカーペットを把持して半回転させるような反転装置ではなくて、ガイドに沿ってタイルカーペットをコンベアにより搬送させながら反転するガイド式反転装置を通過させることにより向きを変えて、反転装置を通過させないタイルカーペットとあわせて積層させ、生産効率の向上を図る。
(もっと読む)
搬送物品間のピッチを変更し、物品を回転させるデバイス
リピッチ動作を実行するデバイス、つまり、物品搬送の流れの中で物品(A)間のピッチを変更するデバイスであって、物品(A)のピックアップ位置(T)と解放位置(G)との間の主軸(X10)周りに軌道運動経路を画定する、物品(A)を搬送する少なくとも1つの搬送部材(12)と、1以上の搬送部材(12)の軌道運動経路を通るカムプロファイルを有し、物品(A)を主軸(X10)周りに搬送するカムフォーメーション(160)と、1以上の搬送部材(12)に保持され物品(A)を搬送する少なくとも1つのカムフォロワ部材(158)と、を備える。軌道運動の速度は、ピックアップ位置(T)と解放位置(G)との間の経路で選択的に可変であることで、ピックアップ位置(T)と解放位置(G)との間の経路で物品(A)間のピッチを変更する。1以上の搬送部材(12)はそれぞれの軸(X12)周りに同様に配向可能であり、主軸(X10)に対して半径方向に配向されることで、ピックアップ位置(T)と解放位置(G)との間の経路の物品(A)の配向を変更する。少なくとも1つのカムフォロワ部材(158)は、カムフォーメーション(160)とカムフォロワ関係で協働して、1以上の搬送部材(12)がピックアップ位置(T)と解放位置(G)との間でとる配向を、軌道運動の速度に関わらず決定する。 (もっと読む)
PTP段積み装置
【課題】ピロー包装の前工程でPTPを段積みするPTP段積み装置において、様々な段積み数に対応できるとともに、段取り替えの容易なものを提供する。
【解決手段】PTP段積み装置1は、PTP100を搬送する第1主コンベア11と第2主コンベア12、第2主コンベア12に並走する副コンベア13、第1主コンベア11、第2主コンベア12、及び副コンベア13の末端に一部が近接配置された段積み用コンベア14、第2主コンベア12上のPTP100を上下反転して副コンベア13に載置する反転移載装置20、及び、第1主コンベア11と第2主コンベア12の上に上下反転無しの状態で存在するPTP100と、副コンベア13上の上下反転有りのPTP100を所定の段積み順序で段積み用コンベア14の第1群のバケット15aまたは第2群のバケット15bに積み上げるロボット30を備える。
(もっと読む)
集積装置およびこれを備えた箱詰め装置
【課題】1台の装置内において、複数の集積パターンによって物品の集積を効率よく行うことが可能な集積装置およびこれを備えた箱詰め装置を提供する。
【解決手段】箱詰め装置1では、搬送装置10から搬送されてくる商品X1,X2を、互いに並列に配置された2つの集積処理部(搬送機構30および吸着搬送機構40)において、異なる集積パターンによって集積処理を行う。そして、搬送機構30と吸着搬送機構40とにおいてそれぞれ集積処理された商品X1,X2を、共通の排出位置である排出装置50の2Fの階層部分から下流側に配置されたフラップ開口装置60の方へ排出する。
(もっと読む)
1 - 20 / 31
[ Back to top ]