
Fターム[5H180FF05]の内容
交通制御システム (133,182) | 個別車両の運行・走行の管理 (59,670) | 車両位置の検出・表示を行うもの (15,249) | 位置情報を車外から受信するもの (8,868)
Fターム[5H180FF05]に分類される特許
201 - 220 / 8,868
運転支援装置、運転支援方法および運転支援プログラム
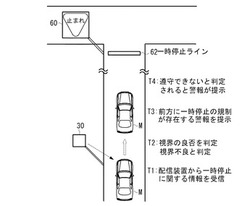
【課題】 自車前方に存在する走行規制に対し注意を喚起する「運転支援装置、運転支援方法および運転支援プログラム」を提供する。
【解決手段】 本発明の運転支援装置は、自車Mが走行している道路前方に存在する一時停止60、62に関する情報を配信装置30からの無線により受信する受信手段と、自車前方を撮像する撮像カメラと、撮像データに基づき自車前方の視界の良否を判定する判定手段と、自車前方の視界が不良であると判定されたとき、一時停止が存在することを知らせる警報を提示する提示手段とを有する。
(もっと読む)
ナビゲーション装置及びレーン変更案内方法

【課題】レーン変更先の走行レーンにおける車両走行速度と自車両の走行速度との差が大きい場合であっても、運転者が安全にレーン変更を行うことが可能な「ナビゲーション装置およびレーン変更案内方法」を提供する。
【解決手段】経路案内すべき交差点から自車位置までの間に複数のレーンがある道路が含まれている場合であって、かつ、複数の走行レーンのうち互いに隣り合う各組の隣接走行レーンの中に車両走行速度の差分が所定値以上となる隣接走行レーンが存在する場合、通常のタイミングよりも経路案内のタイミングを早くするように制御することにより、レーン変更先の走行レーンにおける車両走行速度に自車両の走行速度を合わせるための距離を長く確保できるようにする。
(もっと読む)
自律走行車および自律走行方法
【課題】飛行体と連携して走行先の死角を無くし、走行できる自律走行車を提供する。
【解決手段】飛行体12が自律走行車11を観測することにより得られた自律走行車11の走行履歴と飛行体12が自律走行車11の周辺を観測することにより得られた第1の観測区画毎の自律走行車11の走行可否と第1の観測区画毎の座標とを受信する受信手段と、自車両の位置の履歴を記憶する走行履歴作成手段と、自車両の周辺を観測し、第2の観測区画毎に物体の存在有無を判定する走行可否作成手段と、飛行体12から受信した走行履歴と、走行履歴作成手段により作成された走行履歴とから座標変換行列を算出し、座標変換行列を用いて飛行体12から受信した座標を座標変換し、飛行体12から受信した走行可否と、走行可否作成手段により作成された走行可否とに基づいて、第2の観測区画毎に走行可否を算出する計算手段と、を備える。
(もっと読む)
スケジュール管理装置
【課題】行き先までの距離、経路、移動手段に応じて、適切な時間で使用者に経路案内を通知するとともに、当初通知した案内経路では移動していないと判断すると、予定時刻までに到着可能な経路が存在している限り、現在地からより高速な移動手段、移動経路での経路案内を通知するスケジュール管理装置を提供する。
【解決手段】経路検索手段が、複数の移動手段、移動経路に対応して複数の移動経費または/および所要時間を算出した場合、アラーム手段は、最も安価な経路案内情報を含むアラームを発出し、その後、所定時間が経過し、自動的に取得した現在位置と現在時刻、運行状況に基づいた移動ではもはや予定時刻に間に合わないと判断した場合、再度経路検索を行ない、予定時刻に間に合う経路案内情報がある限り、アラームを発出する。
(もっと読む)
運転支援装置
【課題】車車間通信によって受信した他車両の自位置に基づいて運転支援を行う運転支援装置において、運転者に違和感を与えることなく、運転支援を適切に行う。
【解決手段】運転支援装置(1)は、自位置を認識する自位置認識システム(300)を有する自車両(100)に搭載され、自車両の周辺に位置する他車両(900)から、他車両が有する自位置認識システム(930)によって認識された他車両自位置を受信し、この受信した他車両自位置に基づいて運転支援を行う運転支援装置であって、他車両が有する自位置認識システムの位置精度の信頼度についての他車両信頼度基準と、自車両が有する自位置認識システムの位置精度の信頼度についての自車両信頼度基準とが互いに同じであるか否かを判定する判定手段(21)と、判定手段による判定結果に応じて、運転支援を行う運転支援手段(22)とを備える。
(もっと読む)
無線送受信装置及び移動体管理システム
【課題】無線LAN機能を有する無線送受信装置によって、移動体の状態を監視可能な移動体管理システムを、低コストで簡便に構築する。
【解決手段】移動体の様々な情報を取得するセンサーと、移動体の位置情報取得部と、時刻取得部と、その時刻情報を記録する時計機能部と、データを蓄精する記憶部と、無線LAN送受信部を備え、それぞれが中央演算装置により制御され、移動体に備わる被計測対象の状態、位置情報、時刻情報を無線送信する。無線送受信機能に無線LANを利用することによって、汎用性が高く、世界で最も普及しているインフラを利用することが可能で、安価で手間の掛からない簡便なシステムを構築できる。
(もっと読む)
走行情報収集システム及びサーバ装置
【課題】 本発明は、休憩場所の設置場所を示す指針となる走行情報を収集する手段を提供する。
【解決手段】 走行情報収集システムは、複数の車両毎に搭載される運行データ送信装置と、サーバ装置とを備える。運行データ送信装置は、取得部と、連続走行時間計測部と、運行データ送信部とを有する。位置データ取得部は、車両の走行中の位置データを時系列に取得する。連続走行時間計測部は、車両の連続走行時間を計測する。運行データ送信部は、位置データと連続走行時間とを運行データとして無線データ通信により送信する。サーバ装置は、運行データ取得部と、平均時間算出部とを有する。運行データ取得部は、複数の車両の運行データを無線データ通信を介して取得する。平均時間算出部は、位置データに基づく走行路のうちで外部入力により選択された対象を通過した車両の連続走行時間の平均値を運行データに基づいて算出する。
(もっと読む)
車両制御装置
【課題】車両が右折又は左折する際に、運転者に違和感を与えることなく、適切に加減速を支援する。
【解決手段】車両の制御装置(10)は、車両(1)の走行環境を取得する走行環境取得手段(101、102、103、104、105、111)と、取得された走行環境に基づいて、車両が交差点への進入地点から退出地点へ至るまでに必要な走行距離を推定する走行距離推定手段(109)と、推定された走行距離に応じて、車両の駆動力及び制動力の少なくとも一方を制御する制御手段(109)とを備える。
(もっと読む)
運転支援装置
【課題】直前の先行車両が自車と無線通信が可能でなくとも、信号機の通過の可否を判定することが可能な運転支援装置を提供する。
【解決手段】運転支援装置10の通信車速度変動情報処理部45が、車車間通信処理装置24が無線通信により取得した前方通信車101の加速度a1と、推定した前方通信車101と自車102との間を走行する車間台数Nとに基づいて自車102の将来の速度Vを予測する。また、交差点通過可否判定部52は、信号情報処理部44が取得した青信号の点灯時間と、通信車速度変動情報処理部45が予測した自車102の将来の速度Vとに基づいて、青信号の点灯時間の経過前に自車102が交差点を通過可能か否かを判定する。このため、直前の車両が無線通信を行えない車両であっても、自車102の将来の速度を予測でき、自車102が交差点を通過可能か否かを判定できる。
(もっと読む)
ナビゲーションシステム
【課題】ナビゲーションシステムが案内する方向と案内標識が示す方向とが異なる場合にユーザの不安感を軽減することができるナビゲーションシステムを提供する。
【解決手段】ナビゲーション装置11は、地図情報と現在位置情報と目的地情報に基づいて設定した案内経路を、ディスプレイ16に表示して交差点における自車両の進行方向を案内する。そして、目的地方面に存在する地名を地名情報として取得し、案内標識の方面案内情報の中に地名情報が少なくとも1つ含まれると共に、地名情報に対応した方面案内情報が示す方向と案内経路に沿って案内する方向とが一致しない場合に、案内経路に沿った道筋の確認を可能ならしめる保証案内を行う。
(もっと読む)
車両情報提示装置
【課題】交差点を右折する場合や通過する場合に、ドライバが自らの目で視認して交通環境を確認して運転することを妨げることなく、ドライバが必要とするときに適切に必要な情報を提示して安全性を向上する。
【解決手段】情報処理部1は、自車両が抽出した交差点から設定距離以内の範囲にいる場合で、且つ、自車両が停止しており、且つ、ブレーキスイッチがONで、且つ、ドライバの交差点における車両の交通状況の画像の表示要求が確認された場合に、表示部7の表示領域にポップアップウインドウWを表示する。そして、ポップアップウインドウWを表示した後、アクセル操作が所定に行われた場合に、ポップアップウインドウWの表示を終了する。
(もっと読む)
表示装置
【課題】画像の表示に関して煩わしさを感じさせ難く、画像が見易い表示装置を提供することを目的とする。
【解決手段】画像を表示する光を、フロントガラス15にて反射させ、ドライバーの目17に出力し、車両2の前方に、前記画像を虚像19として表示する虚像表示手段3と、前記車両2から所定の目標地点までの距離Bを取得する距離取得手段9と、前記ドライバーから見て、前記画像が前記目標地点から所定の距離Aにある道路上に見えるように、前記虚像表示手段3における前記画像の表示位置を設定する表示位置設定手段5と、前記ドライバーの操作に応じ、前記虚像表示手段3によって前記表示位置に表示される画像を、(a)前記距離Aを表す画像X、及び(b)前記画像Xよりもぼやけている画像Yのうちのいずれかとする画像選択手段11と、を備えることを特徴とする表示装置1。
(もっと読む)
情報処理装置、車載装置、情報処理システム、情報処理方法、および、プログラム
【課題】ドライバーのための具体的な危険回避のためのアドバイス情報を選択する技術を提供する。
【解決手段】 複数の地点ごとに対応付けられた検知情報及び状態情報に基づいて複数の地点に応じたアドバイス情報を選択する選択手段を備えており、この選択手段は、検知情報の複数の項目のうちの一つを代表検知項目として選択する第1手段と、代表検知項目に関連する前記複数種類の状態情報の一部種類を選択する第2手段と、一部種類の状態情報の項目のうち、所定の条件を満足する項目を代表状態項目として選択する第3手段と、代表検知項目及び前記代表状態項目に基づいて、アドバイス情報を選択する第4手段と、を備えるこれにより、ドライバーのための具体的な危険回避のためのアドバイス情報を選択できる。
(もっと読む)
渋滞範囲予測方法および装置
【課題】突発事象による渋滞が発生した場合、経路探索を繰り返すことなく、確実に渋滞範囲を回避する経路を提示する。
【解決手段】突発事象の情報を含む交通情報を取得する交通情報取得ステップと、突発事象により発生した渋滞の渋滞開始時刻,渋滞解消時刻の少なくとも一方の時刻をメッシュごとに予測する渋滞到達時刻予測ステップと、出発位置および出発時刻に基づき出発位置周辺のメッシュごとに出発地からの到達時刻を予測する到達時刻予測ステップと、突発事象により発生した渋滞が解消するまでの間に、渋滞の影響を受ける渋滞の範囲を算出する渋滞影響範囲算出ステップと、を実行し、求めた渋滞影響範囲を回避するように経路を設定することで、将来に渡って確実に渋滞を回避することができ、また、経路探索回数を削減することができる。
(もっと読む)
車両走行制御装置
【課題】先行車両の状況に応じた適正な追従制御を実行することができる車両走行制御装置を提供することを目的とする。
【解決手段】少なくとも自車両21の走行方向の前方を走行する先行車両22と当該先行車両22の走行方向の前方を走行する先々行車両23とを含む先行車両群25の平均の速度Vavと、自車両21と先行車両22との車間距離Drとに基づいて、自車両21を先行車両22に追従させる追従制御を実行することを特徴とする。したがって、先行車両22の状況に応じた適正な追従制御を実行することができる車両走行制御装置を提供することができる。
(もっと読む)
車載装置
【課題】SA/PAから導入路への逆走を効果的に防止する。
【解決手段】車載装置は、SA/PA300に進入するための導入路302と高速道路301との分岐点311を中心にした扇形の範囲を逆走判定範囲312aまたは312bとして設定し、自車位置310が逆走判定範囲312aまたは312bの内側にあるかどうかを判定する。自車位置310が逆走判定範囲312aまたは312b内にあると判定された期間における走行距離を取得し、その走行距離が閾値を越えている場合に車両が逆走しようとしていると判定し、乗員に警告を行う。
(もっと読む)
駐車支援装置
【課題】運転者に煩わしさを感じさせることなく商品性を高めることができる駐車支援装置を提供すること。
【解決手段】本発明による駐車支援装置1は、車両の周辺の駐車空間を検出する検出手段bと、駐車空間に基づいて初期停車位置を決定し初期停車位置への案内を行う案内手段jと、車両の位置を検出する位置検出手段aと、位置が所定の領域に存在する場合に検出手段bに駐車空間を検出することを開始させる開始処理を行う開始手段dを含むことを特徴とする。
(もっと読む)
避難ルートマップ作成システムおよび避難ルートマップ作成装置
【課題】災害発生時の避難ルートを、移動体の種別ごとに提示するための地図情報を生成する避難ルートマップ作成システムおよび避難ルートマップ作成装置を提供する。
【解決手段】災害発生地域を移動する複数種別の移動体にそれぞれ設置され、
GPS機能により所定時間間隔で取得された位置情報に基づいて生成された、当該移動体が通行した通行区間を示す通行区間情報、および入力された当該移動体の種別を示す移動体種別情報を含む移動情報を生成して送信する移動情報送信部15を有する携帯端末10−1〜10−4と、携帯端末10−1〜10−4から受信した移動情報に基づいて、移動体種別ごとの通行可能な区間により、地図上に避難ルートを明示した避難ルートマップ情報を作成する避難ルートマップ作成部22を有するセンター装置20とが無線通信可能な状態で接続される。
(もっと読む)
交差点運転支援装置
【課題】非優先道を走行する車両が優先道に進入するに際し、見通しの良い交差点では交差点支援情報を報知しないことで、運転者に与える煩雑感を軽減させるようにする。
【解決手段】非優先道102から優先道101に進入するに際し、見通し判定処理部14は一時停止位置104付近に設置されている第1インフラ設備103aから得られた優先道101側の移動体情報と、車両に搭載されている自律センサで検出した優先道101側の移動体情報とを比較し、不一致の場合は見通しが悪いと判定し、一致した場合は見通しが良いと判定する。そして不一致の場合は運転者に交差点支援情報を運転者に報知し、一致した場合は、運転者が目視により確認済みであると判定し報知しない。
(もっと読む)
危険感知システム
【課題】 携帯端末所持者の動きが通常行動では見られない異常状態である場合には危険状態に遭遇しているものと関係者に通知する。
【解決手段】 ジャイロセンサーが感知した携帯端末所持者の動きを示すデータと現在位置検出手段が検出した現在位置情報を受信するホスト装置とから成るシステムであって、
ホスト装置が、ジャイロセンサーが感知した携帯端末所持者の動きを示すデータを第1のデータベースに順次記憶させる変換手段と、携帯端末所持者の行動が通常行動状態のものであるか否かを識別する閾値を記憶した第2のデータベースと、ジャイロセンサーが感知した携帯端末所持者の動きが閾値を超えた場合に、第3のデータベースに記憶した行動パターンを参照し、携帯端末所持者が危険状態に遭遇したと看做せる場合には携帯端末から受信した現在位置情報と所持者が危険状態に遭遇していることを示すメッセージとを関係者の情報端末に通知する通知手段とを備える。
(もっと読む)
201 - 220 / 8,868
[ Back to top ]