
Fターム[5J070AF01]の内容
レーダ方式及びその細部 (42,132) | レーダの設置 (3,019) | 固定設置 (685)
Fターム[5J070AF01]に分類される特許
121 - 140 / 685
反射型侵入監視装置
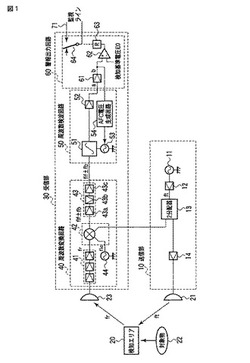
【課題】電子機器から発生するスイッチングノイズ等の影響を受けることなく、侵入者を確実に検知することができる反射型侵入監視装置を提供する。
【解決手段】送信部10は送信アンテナ21からマイクロ波を検知エリア20へ送信する。受信部30は検知エリア20に侵入した対象物22からの反射波を受信アンテナ23で受信し、周波数変換回路40にて受信信号frをローカル信号flo、ftと混合して中間周波数fifに変換する。周波数検波回路50は、中間周波数fifを中間周波信号IF2に変換して周波数検波する。AFC電圧生成回路54は、反転直流増幅器61で増幅された検波電圧bと予め設定したしきい値と比較し、検波電圧bがしきい値を超えない範囲では周波数検波部51内の周波数変換部の周波数制御を行い、検波電圧bがしきい値を超えると上記周波数変換部の周波数制御を停止する。
(もっと読む)
空港面監視方法及び空港面監視システム

【課題】 複数の目標が接近して一目標と認識してしまう程度の方位分解能である一次レーダであっても、二次レーダを利用して、方位分解能を擬似的に向上させ、近接した複数の目標の誤検出を減少させて、精度の高い航跡(統合航跡)を生成することが可能な空港面監視方法及び空港面監視システムを提供すること。
【解決手段】 一次レーダから得られる目標位置と目標に搭載されたトランスポンダからの返信波を受信する二次レーダから得られる目標位置とを統合して目標位置の経時変化である目標の航跡の精度を向上させる空港面監視方法において、前記二次レーダが検出した二つの目標位置の目標間距離が、前記二次レーダが検出した二つの目標位置における前記一次レーダの分解能よりも小さいときに、前記目標間距離の中間座標及び中間座標の周辺に相当する前記一次レーダによる目標のエコーを間引き、前記一次レーダによる目標位置を検出して目標の航跡を得る。
(もっと読む)
二次監視レーダ
【課題】二次監視レーダから航空機に有用な情報をTIS−Bの信号として配信する。
【解決手段】航空機に質問信号を送信する送信手段と、航空機から送信される質問信号に応答して送信される応答信号を受信する受信手段とを有し、当該受信手段が受信する応答信号を利用して航空機の飛行を監視する二次監視レーダであって、所定の範囲にADS−Bを搭載する航空機であるADS−B搭載機が存在するとき、ADS−B搭載機に送信するTIS−B信号を生成する生成手段を備え、送信手段は、生成手段が生成したTIS−B信号を送信する。
(もっと読む)
移動物体の監視システム
【課題】監視する必要のある移動物体をより的確に監視できるようにする。
【解決手段】漏洩伝送装置を伝送媒体として漏洩伝送装置の両端の一方の端側から他方の端側へ第1の送信信号を送出する第1の機器100、漏洩伝送装置を伝送媒体として漏洩伝送装置の両端の他方の端側から一方の端側へ第2の送信信号を送出する第2の機器200、及び第1及び第2の漏洩伝送路301,302の一方の漏洩伝送路から第1の送信信号が放射した第1の電波が監視対象の移動物体に反射した第1の反射電波を漏洩伝送装置を介して受信した第1の受信信号の変化と第1及び第2の漏洩伝送路の一方の漏洩伝送路から第2の送信信号が放射した第2の電波が監視対象の移動物体に反射した第2の反射電波を漏洩伝送装置を介して受信した第2の受信信号の変化との違いに基づいて監視対象の移動物体の2次元の動きを検知する検知部400を備えている。
(もっと読む)
移動体検知システム及び移動体検知表示装置
【課題】車両等の移動体を検知する移動体検知システムにおいて、移動体に適切な移動方向を指示する。
【解決手段】車両等の移動体を検知する移動体検知システムにおいて、移動体検知手段(例えば、ミリ波レーダ装置)が検知範囲に存在する移動体を検知し、進行方向決定手段が前記移動体検知手段により検知された移動体に対して表示する進行方向を決定し、表示手段が前記移動体検知手段により検知された移動体に対して前記進行方向決定手段により決定された進行方向の情報(例えば、移動体を誘導するための矢印の情報)を表示する。
(もっと読む)
セルラー式移動無線測位システム
【課題】移動端末の1次元〜3次元の何れかの次元の位置を高精度で測位する装置を安価に実現する。
【解決手段】移動端末103から起点信号を含む無線信号をバースト信号として間欠発信し、セル毎もしくはセクタ毎に配置された複数の無線マーカ101a、101bからは、再生した起点信号と高精度に同期を確立した距離測定信号と、方向を測定するための方向測定信号とを含む無線信号を、複数の指向性アンテナ21aa〜21bdを周期的に切替えながら時分割で発信し、前記移動端末103において、前記距離測定信号の位相を測定して複数の無線マーカ101a、101bからの距離を算出し、前記複数のアンテナ21aa〜21bdに対応した方向測定信号の位相差を測定して複数の無線マーカ101a、101bが位置する方向を算出することによって、前記移動端末103の1次元〜3次元の何れかの次元の位置を高精度で測位する。
(もっと読む)
パッシブ型飛しょう体飛しょう制御装置および制御方法
【課題】TDOAとFDOAを観測し、目標の位置をパッシブに測位するパッシブ型飛しょう体において、測位精度の向上を図る。
【解決手段】既知の送信源から照射され目標に当たって散乱した散乱波と、既知の送信源から直接到来する直接波との両方を受信することでTDOAおよびFDOAを観測し、自らは電波を放射することなく目標を測位して自らの飛しょう経路を目標へと向かうように制御する飛しょう制御部(14)を備えたパッシブ型飛しょう体飛しょう制御装置であって、自機、送信源、目標の幾何学的配置からGDOPを演算するとともに、ISO−TDOAとISO−FDOAの直交度を推定し、現在の飛しょう体による測位誤差の定量的な判断指標を生成するGDOP演算部(18)をさらに備える。
(もっと読む)
二次監視レーダ
【課題】航空機の監視とともに、空港付近を飛行する航空機の危険を防止する。
【解決手段】危険進路を飛行する航空機の有無を判定する判定部(134i)と、判定部によって危険進路を飛行する航空機が存在すると判定されたとき、航空機に搭載される航空機衝突防止装置に衝突の回避を促がす回避指示信号を送信するタイミングを設定する設定部(135)と、設定部で設定された回避指示信号の送信タイミングで、回避指示信号の送信用として規定される質問信号の受信周波数を送信機に出力する周波数切替部(137)と、送信タイミングで、周波数切替部から出力された質問信号の受信周波数の回避指示信号を送信させるように送信機を制御する送信制御部(131)とを備える。
(もっと読む)
レーダ情報処理システム及びレーダ情報処理方法
【課題】複数のレーダ装置の受信信号から検出された目標に関する情報を正確に同期表示させること。
【解決手段】第1レーダ装置1及び第2レーダ装置2は、空中線11、21を同一周期で回転させてレーダパルスを送受信して、目標検出部13、23により目標を検出する。データ処理装置3は、第1レーダ装置1及び第2レーダ装置2により検出された複数の目標情報を同期させて出力する。第1レーダ装置1及び第2レーダ装置2は、目標検出処理前後の方位値を目標情報に付加してデータ処理装置3に出力し、データ処理装置3は、目標検出処理前後の方位値をもとに複数の目標情報を基準値に合わせて遅延させる。
(もっと読む)
検出装置
【課題】 非検出物体の速度、距離、方位、大きさを検知可能な検出器を提供する。
【解決手段】
発振器と送信伝送部と送信アンテナとを含む送信部と、受信アンテナと送信部からの信号と受信アンテナからの信号を混合し中間波信号を出力するミキサとを含む、2つ以上の受信部とを設ける検出装置である。これにより、非検出物体の速度、距離、方位、大きさを検知可能となり、例えば自動ドアの開閉システムに適応したときに誤作動を少なくすることができる。
(もっと読む)
航空機位置測定システム、該システムに用いられる応答信号判別方法及び応答信号判別プログラム
【課題】受信局で受信される信号のみでモードA応答かモードC応答かが判別可能な航空機位置測定システムを提供する。
【解決手段】位置情報処理手段(データ処理部30)では、応答信号種類判別手段(受信情報収集部31、信号抽出記録部34、モードC信号変換部35、モードC信号種類判定部36、モードA信号変換部37、モードA信号種類判定部38)により、各受信局21,22,…,25で受信された応答信号のビット列が気圧高度情報(モードCコード)に変換されると共に、同気圧高度情報と幾何学的高度情報とが比較され、この比較結果に基づいて、上記応答信号がモードA信号に対応するモードA応答か上記モードC信号に対応するモードC応答かが判別される。
(もっと読む)
物体の向き検出システム
【課題】簡易かつ安価で正確に物体の姿勢を検出できる物体の向き検出システムを提供することを目的とする。
【解決手段】測定対象物30の両面にはRFタグユニット20a,20bが取り付けられている。RFタグユニット20a,20bは、それぞれRFタグ21a,21bと高透磁率シート22a,22bと電磁波遮断シート23a,23bとが順に積層されている。RFタグリーダ10の送信信号生成部11で生成された送信信号は、アンテナ13から電磁波として放射される。受信信号判定部12は、RFタグ21a,21bからの応答の有無に基づいて、測定対象物30のいずれの面がRFタグリーダ10のアンテナ13側を向いているのか判定し、うつ伏せ状態を検出する。
(もっと読む)
自動追尾レーダ装置および自動追尾方法
【課題】雑音帯域幅の狭い追尾ループでの追尾を可能とし、追尾限界となるS/N比を改善することが可能な自動追尾レーダ装置を提供する。
【解決手段】ロケットやスペースデブリ等の飛翔体を自動追尾する自動追尾レーダ装置として、前記飛翔体を初期捕捉して、自動追尾モードに移行した以降において、アンテナ指向追尾系ループのアンテナ指向誤差検出器16、積分器17および距離追尾系ループの距離誤差検出器23、積分器24にて検出されたアンテナ指向誤差および距離誤差に基づき、アンテナ追尾ループフィルタ18および距離追尾ループフィルタ25それぞれにて生成されるアンテナ指向角度の制御情報および受信タイミングの制御情報を、予見情報(角速度、各加速度)加算器27および予見情報(速度、加速度)加算器26にて、前記飛翔体の軌道予測値、他のレーダ装置の追跡情報または過去の追跡データに基づく予測値である予見情報を用いてさらに補正する。
(もっと読む)
DME地上装置、及びDME地上装置による距離情報送信方法
【課題】所定の信号レベル以上のCW妨害波が入力されても、正常な応答信号の送信パルスを発生させることによってDME地上装置が運用停止に至らないようにする。
【解決手段】受信機15は、航空機(図示せず)から到来した測定用質問信号の信号レベルや自己診断を行うために質問信号発生部18で発生させた診断用質問信号の受信信号レベルを常時監視している。受信機15にCW妨害波が到来すると、監視制御装置17aの質問信号発生部18で発生させた診断用質問信号の信号レベルを可変増幅器19で増幅し、増幅された診断用質問信号の信号レベルがCW妨害波の信号レベルより高くなるように制御を行う。これにより、CW妨害波の信号レベルが高くなっても、送信機16から空中線11を経由して航空機へ安定した応答信号を送信することができる。したがって、DME地上装置10aは、航空機に対して安定的に距離測定情報を送信し続けることができる。
(もっと読む)
自律移動支援システムとその制御方法
【課題】移動端末あるいは基準局から発信する無線信号を、複数の中継手段によって中継しあるいは再発信し、位置特定手段によって受信することで、前記移動端末の位置を高精度で特定できる自律移動支援システムを提供する。
【解決手段】位置特定手段において移動端末の位置を特定し、あるいは位置特定手段において自局の位置を特定するシステムにおいて、無線信号が同一周波数であり、時分割でかつバースト信号として間欠発信するための、移動端末あるいは基準局と、前記移動端末あるいは基準局から発信される無線信号を中継しあるいは再発信するための中継手段と、位置を特定するための位置特定手段とから構成される。
(もっと読む)
人体検知装置
【課題】 ドップラ信号を利用した人体検知装置において、少ない演算量で、人の行動状態を的確に把握する。
【解決手段】 人体によって反射された伝播波のドップラ信号を利用した人体検知装置であって、人体に向けて伝播波を放射する伝播波発信部と、人体によって反射された伝播波を受信する伝播波受信部と、上記伝播波発信部によって放射された伝播波及び上記伝播波受信部によって受信された伝播波に基づいてドップラ信号を生成するドップラ信号生成部と、このドップラ信号生成部によって生成されたドップラ信号を解析してドップラ信号の振幅を算出するドップラ信号解析部と、上記ドップラ信号の振幅が上記第一振幅閾値を上回った後に上記第一振幅閾値を下回ると、その時点よりも所定期間前の上記ドップラ信号の振幅に基いて人体までの距離を推定し、その推定結果に基いて人体の行動状態を判定する行動状態判定部と、を有することを特徴とする。
(もっと読む)
2次監視レーダ及び信号処理方法
【課題】電波障害時であっても機上からの情報を正しく復号可能にすること。
【解決手段】2次監視レーダ装置は、ターゲットに対して複数の質問を送信する送信部23と、前記ターゲットから送られてくる前記質問に対する応答を受信する受信部22と、前記ターゲットの方位及び距離をもとに前記応答のタイミングを予測し、前記タイミングに基づいて前記複数の質問に対する応答の受信判定を行い、前記受信判定において受信できなかった応答を受信するために質問を再送し、前記受信された応答の順番を並べ替え、前記順番に基づいてターゲットレポートを作成する信号処理装置3とを具備する。
(もっと読む)
シミュレータ
【課題】信号の輻輳、輻輳、フルーツ干渉等の発生時における二次監視レーダ及びSIF装置の動作を検証する。
【解決手段】対象範囲に検証の対象として所定時刻に存在が想定される機体の位置と、当該機体が応答する信号の種別と、当該機体の送信信号の情報を関連付ける機体データを記憶する機体データ記憶部13eと、動作を検証する装置が機体に送信した所定形式の信号を入力すると、機体データから、入力した信号の送信対象である機体の位置及び信号の種別と関連付けられる送信信号の情報を検索する機体検索手段13fと、機体データから検索された送信信号の内容を合成して模擬信号を生成する応答発生手段13gとを備える。
(もっと読む)
目標追尾装置及び目標追尾方法
【課題】時系列的に取得された目標信号から得られる複数の目標位置に関するデータに基づいて目標の追尾を行う目標追尾において、従来のウィンドウを用いた場合に発生する目標の乗り移り、ロストといった問題を解消する。
【解決手段】あるタイミングで取得された複数の目標位置と、過去のタイミングで取得された複数の目標位置または過去のタイミングで取得された目標位置に基づき求められたあるタイミングにおける複数の目標予測位置である複数の被マッチング目標位置との対応付けを行い、被マッチング目標位置と対応付けられた目標位置を、被マッチング目標位置に対応する目標識別データと関連付けて格納する。
(もっと読む)
自動供給装置および自動供給システム
【課題】複数のセンサの干渉を防止して正常に対象物を検出することができ、かつ、製造コストを抑制した自動供給装置および自動供給システムを提供する。
【解決手段】自動供給装置は、連立して配置される複数の容器に対応して設けられ、ドップラセンサと、ドップラセンサからのドップラ信号に基づいて対象物を検出する検出部と、検出部の結果に基づいて流体を供給する供給部と、ドップラセンサを制御するセンサ制御部と、通常動作中の検出周期、および、通常動作開始後に最初に電波の送受信を行うタイミングを決定する固有期間を予め記憶する記憶部とを備え、電波の送信を行わず受信のみを行うリセット動作を通常動作の開始前に実行し、リセット動作中に、他の容器の自動供給装置から送信されたマスタ信号を受信し、マスタ信号の受信時点から通常動作を開始し、ドップラセンサはマスタ信号の受信時を起点として固有期間の経過時に最初の電波の送受信を行う。
(もっと読む)
121 - 140 / 685
[ Back to top ]