
Fターム[5J084DA07]の内容
光レーダ方式及びその細部 (24,468) | 図面 (2,209) | 送受信部の配置又は設置の構成図 (450)
Fターム[5J084DA07]に分類される特許
21 - 40 / 450
無線タグリーダおよび監視システム
【課題】無線タグの方向探知精度がよい無線タグリーダを提供する。
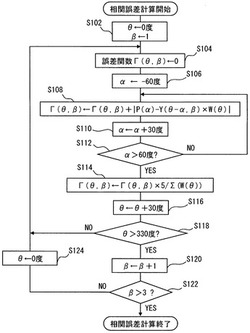
【解決手段】無線タグ400の各タグアンテナ412、414、416からの電波から電力強度パターンと参照パターンとの相関誤差をそれぞれ算出する(S108)。参照パターンは、理想的な環境で、アンテナ部1が指向性を順次切り替えたときに垂直偏波を受信した場合の電力強度パターンである。よって、この参照パターンと各タグアンテナ412、414、416から受信した電波の受信電力強度パターンとの相関誤差Γは、受信した電波が水平偏波を主とする場合に大きな値となる。この相関誤差Γが最小となる電力強度パターンを方向推定用のパターンとして選択しているので、選択したパターンは垂直偏波を主とする電波を受信したときのパターンである可能性が高い。よって、高い精度で無線タグ400の方向探知を行なうことができる。
(もっと読む)
レーザレーダ装置の設置角度設定システム及びレーザレーダ装置の設置角度設定方法

【課題】レーザビームの走査面を、より簡単に地面と平行に設定できるレーザレーダ装置の設置角度設定システムを提供する。
【解決手段】レーザレーダ装置11に、本体11aが壁面3に設置された状態で、レーザビームの走査面を90°変化可能なものを使用し、レーザビームの走査面を地面2と直角にした状態で、2つの走査角度θ1,θ2について地面までの距離l1,l2をそれぞれ測定し、その測定結果に基づいて、レーザビームが基準角度0°にある状態で、地面2と平行になるまでの角度差θxを算出する。そして、レーザレーダ装置11の本体11aを地面2の方向に角度差θxだけ傾けて、レーザビームの走査面を90°回転させる。
(もっと読む)
対象物との相対位置計測方法と装置
【課題】向きの変更と移動の少なくとも一方を行う動作体から、対象物との相対位置を高精度に計測できる手段を提供する。
【解決手段】動作体3に設置したレーザ距離センサにより、各被計測点の位置を動作体座標系で表わされた座標値を取得する。動作体3に設置した撮像装置により、対象物5が含まれる領域を撮像して画像を生成する。画像において、対象物5に取り付けられた指標の位置を特定し、この位置に基づいて、撮像時において対象物5の方向を特定する。距離計測時の動作体3の向きと位置に対する撮像時の動作体3の相対的な向きθと位置Δx,Δyに従って、各被計測点の座標値を、距離計測時の動作体座標系の座標値から撮像時の動作体座標系の座標値に変換する。画像内の指標の位置に対応する、変換後の座標値を特定し、この座標値に基づいて、撮像時における動作体3から対象物5までの距離を求める。
(もっと読む)
侵入検出装置及びロボットシステム
【課題】撮像部によって上方から撮像して侵入物を検出する場合、検出範囲の形が円錐形となり、検出範囲がそれだけ狭くなってしまう問題が生じる。
【解決手段】作業が行われる領域を含む作業面1と、作業面1に設けられた識別領域3と、識別領域3に対向する位置に設けられた反射鏡4と、反射鏡4を介して識別領域3を撮像する撮像部5と、撮像された識別領域3の画像に基づいて、識別領域3に侵入した侵入物を検出する侵入物検出部と、を有する。
(もっと読む)
赤外線センサを用いた運転者状態監視装置及びその方法
【課題】赤外線LED及びカメラを用いて運転者状態を確認することにより、カメラ又は運転姿勢に従い発生することのある認識誤謬を低減できる運転者状態監視装置を提供する。
【解決手段】光信号を発光する発光部101及び前記光信号を受光する受光部103を含み、発光部101から発光される光信号と、受光部103により受光される光信号の位相差を用いて、正面の運転者までの距離を測定する赤外線センサ100、運転者の顔を撮影し、撮影された映像で運転者の顔を検出する顔認識カメラ110、及び赤外線センサ100及び顔認識カメラ110を介して測定されたデータを用いて認識誤謬が発生したのかの可否を判別し、認識誤謬が発生した場合、発生した認識誤謬を分析する電子制御部120を含み、運転者が正常状態か、不注意、眠気などの不注意状態かを確認する。
(もっと読む)
信号処理装置
【課題】複数のAD変換器を用いて同一のアナログ信号をAD変換する信号処理装置において、個々のAD変換器の特性のばらつきによって生じる同一のアナログ信号のAD変換精度の低下を抑制する。
【解決手段】クロック生成部58はπ[rad]位相の異なる二つのクロックを生成し、対象信号供給部52は受信信号RSまたは0VのいずれかをAD変換部68の二つのAD変換器72、74に供給する。被補正データ生成部86は、AD変換部68が受信信号RSをAD変換した結果に基づき、読出データRDを生成する。オフセットデータ生成部76は、AD変換部68が基準電圧をAD変換した結果に基づき、AD変換器72、74毎の測定誤差を表すオフセットデータAZ1、AZ2を生成する。補正部100は、読出データRDからオフセットデータAZ1、AZ2分を除去する補正処理を実行し、サンプリングデータSDを生成する。
(もっと読む)
レーザー監視システム
【課題】入港する船舶を検査するためのレーザー監視システムによる方法及びシステムの提供。
【解決手段】レーザー監視システムは、概して水位線150以下に配置された筐体と筐体内に配置されたレーザー及び検出器機構110を含む。この機構はレーザー源とセンサーを含む。レーザー源は、検査対象となっている船舶100に向けてレーザービーム220を発射するように構成されている。センサーはレーザービームの反射光を受信するように構成されている。
(もっと読む)
距離測定装置
【課題】車両と測定対象物との間の距離が変化する場合であっても、測定対象物までの距離を高精度に測定することが可能な距離測定装置を提供する。
【解決手段】投光部11より、水平方向に広がる発光領域を有すると共に、上端部、及び下端部が水平となる直線状の端部を有する時間変調した領域光を投光する。そして、測定対象物にて反射した領域光をカメラ12にて撮像し、撮像した画像から上端エッジ、及び下端エッジを抽出し、更に、上端エッジ、及び下端エッジに基づき、三角測量の原理により第1測定距離、及び第2測定距離を求める。そして、測定対象物が車両から遠ざかる場合には、第2測定距離を選択し、測定対象物が車両に近づく場合には第1測定距離を選択する。その結果、測定対象物との間の距離が変化する場合であっても、距離の測定精度を向上させることが可能となる。
(もっと読む)
三次元点群計測方法、三次元点群計測プログラム
【課題】GPS測位演算によりFix解が得られている場合であっても、GPS衛星が元々有する測位誤差要因により測位精度の劣化が生じている。静止測量では長時間の静止によって平均的な解を求めることで精度の劣化を低減できるが、移動体測量では静止ができない、あるいは低速で走れないことが通常であるので、静止測量のように時間平均により精度劣化を抑えることができない。
【解決手段】同じ走行路を複数回走行し、各走行でのレーザ点群の結果において位置が変化しない固定物を基準点とし、基準点が重ね合わさるように点群を伸縮する。この際、位置精度の信頼度で重み付けを行い、その平均的な結果を真値として扱う。また、走行中は常にGPS衛星の状態が変化するので、一点で補正するのではなく一定間隔ごとに固定物を特定して、各走行ごとに位置補正量を算出する。
(もっと読む)
光走査装置
【課題】投光タイミングのテーブルがなくても、容易に、光ビームの照射対象領域の各画素に光ビームを照射することができる光走査装置を提供する。
【解決手段】反射ミラーを互いに直交する第1軸及び第2軸の各軸回りに揺動し、光ビームを照射対象領域内でリサージュ走査可能に形成された光走査部1と、各軸回りの揺動位相を検出する位相検出部2と、反射ミラーに光ビームを投光する光源部3と、第2軸回りの揺動周期Tyの半周期におけるリサージュ走査軌跡に、第1軸回りの走査方向で互いに略平行な走査線対S,Sが存在するように、各軸回りの揺動周期Tx,Tyを設定し、Tyの半周期毎に第2軸回りの走査振幅を一定量ずつ変化させ、光走査部1を駆動させる走査制御部4と、位相検出部2で検出する揺動位相に基づいて走査線対S,Sの走査時に対応する位相区間だけ、光源部3から光ビームを投光させる光源制御部5と、を備える。
(もっと読む)
位置確認システム
【課題】利用者による特別な動作が無くても利用者の位置を確認することが可能な位置確認システムを提供する。
【解決手段】位置確認システム1Aにおいて、発光装置20は、当該発光装置に固有の信号が含まれるように変調された光を発光し、受光装置30Aは、反射装置で反射した光を受光したときに、受光した光に含まれる信号を制御装置40へ出力し、制御装置40は、発光装置20に固有の信号と当該発光装置20の設置場所とが関連付けて記憶された記憶部41と、受光装置30Aから出力された信号を用いて記憶部41を参照することによって、信号に関連付けられた設置場所を記憶部41から読み出す位置確認部42と、を備える。
(もっと読む)
自動水栓
【課題】 使用者の用途に応じた吐水形態の切り替えを可能とする自動水栓を提供する。
【解決手段】 給水経路から給水された水を吐出する吐水口と、前記給水経路に接続された電磁弁と、前記電磁弁を駆動することで吐水と止水とを切り替える制御部と、前記吐水口近傍の異なる位置に設けられた少なくとも2つの検知センサと、を備え、前記検知センサの検知領域が検知センサ近傍において重なっていない自動水栓において、前記制御部は、いずれかの検知センサの検知レベルが所定の吐水検知レベル以上であると吐水を行うと共に、一方のセンサの検知レベルが吐水検知レベルより高く設定された近接検知レベル以上であると、他方のセンサの検知レベルに基づいて吐水と止水の切り替えを行う。
(もっと読む)
障害物検出方法及び障害物検出装置
【課題】レーザ光の照射効率を向上させるとともに、垂直方向の分解能を向上させることができる障害物検出方法及び障害物検出装置を提供する。
【解決手段】レーザ光を投受光するレーザレーダ1を設置する設置工程(SP101)と、監視範囲Aに向かってレーザ光を照射して監視範囲Aの位置を特定する監視範囲位置特定工程(SP102)と、レーザレーダ1の俯角φ0を調整する俯角調整工程(SP103)と、監視範囲Aにおける垂直走査角度の最小値φminを算出する最小値算出工程(SP104)と、監視範囲Aにおける垂直走査角度の最大値φmaxを算出する最大値算出工程(SP105)と、垂直走査角度の最小値φmin及び最大値φmaxに基づいてレーザレーダ1の垂直画角Δφを設定する垂直画角設定工程(SP106)と、を有し、垂直画角Δφの範囲内でレーザ光を垂直方向に走査させて障害物Tを検出する。
(もっと読む)
距離測定装置
【課題】移動体と対象物との間の相対的な位置関係が変動した場合でも、高精度な距離の測定が可能となる距離測定装置を提供する。
【解決手段】投光部11より、上端部を有し、且つ、水平方向に広がる発光領域を有する第1投光パルスを照射する。そして、測定対象物31にて反射する領域光をカメラ12にて撮像し、この画像を同期検波して第1投光パルスの上端部に対応する上端エッジを検出する。また、第1投光パルスがオフとされているときに撮像される測定対象物の画像から該測定対象物31の形状エッジを検出し、形状エッジと上端エッジが一致する場合については、この上端エッジを除去し、両者が一致する場合の上端エッジを用いて三角測量の原理を用いて、測定対象物31までの距離を測定する。
(もっと読む)
距離測定方法及びそのシステム
【課題】距離測定過程での演算速度と測定の正確性を高め、回路占用面積と消費電力を減少した、距離測定方法及びそのシステムの提供。
【解決手段】本発明の距離測定方法及びそのシステムは、光速度値と光信号が被測定物までを往復する時間値を利用して距離の演算を行い、前記光信号の発信/受信と同期するクロックマスクを利用して、このクロックマスク下の基準信号のサイクル数を取得して時間値を換算して得ると同時に、前記基準信号に基づいて生成された複数の位相シフト信号を利用して前述の時間値を修正し、かつ位相シフト信号数の増加に伴いエラーをさらに縮小して、正確な光信号が被測定物までを往復する時間値を取得することができ、且つ測定速度が速く、測定システムが占用する回路面積が小さいという利点がある。
(もっと読む)
レーザ誘導装置
【課題】 レーザ発振部と受信部を備えた飛しょう体において、目標と背景を高精度で分離するとともに遮蔽物の陰に隠れた目標を検出し、背景への誤追尾を防止し、目標に対して精密に誘導することのできる誘導装置を得る。
【解決手段】 目標を含む走査範囲にレーザ光を照射する。反射光を検出し、反射光の受信強度と受信までの遅延時間を用いて走査範囲の強度画像と3次元画像を生成する。得られた3次元画像から走査範囲の各位置における高度値の標準偏差を計算し、平面領域と非平面領域とを判定する。非判定領域に対して強度画像と3次元画像を組み合わせた目標認識処理を行って目標と背景を分離することにより、目標の認識確率を向上させる。また、背景領域の中の平面領域を基準として目標までの距離に応じたゲート時間を設定し、ゲート時間の間に受光した反射光に基づき、遮蔽物の陰に隠れた目標を検出する。
(もっと読む)
車両周辺監視装置
【課題】車両周辺の監視領域に存在する対象物を少なくともレーダ装置により検知する場合に、監視領域に存在する個々の対象物の検知の信頼性を高めることができる車両周辺監視装置を提供する。
【解決手段】レーダ装置2よりレーダ電波の走査を行なう車両周辺の監視領域を車載カメラ3により撮像し、撮像画像の色情報又は輝度情報に基づいて、監視領域におけるレーダ電波の反射率の分布を反射率推定手段5により推定する。レーダ電波の反射波に受信強度に対する閾値(監視領域の各局所に対応する閾値)を、受信強度閾値設定手段6により、推定した反射率の分布に応じて設定する。対象物認識手段7は、少なくとも前記反射波の受信強度と前記設定された閾値との比較に基づいて前記監視領域に存在する対象物を検知する。
(もっと読む)
車両用制御装置
【課題】基準軸のずれが発生したことを精度よく検出することが可能な車両用制御装置を提供する。
【解決手段】運転者支援システムにおけるヘッド部では、車両に対する物標探査器7の姿勢変化量(傾斜量,加速度)を検知する姿勢検知器8が、物標探査器7とともに筐体30の内部に固定されており、制御部20が、姿勢検知器8にて検知した姿勢変化量が予め設定された閾値変化量(閾値傾斜量,第1の加速度)を上回る場合に、物標探査器7の基準軸のずれが発生したことを検出する。つまり、実際に物標探査器7が車両に対して所定量ずれている場合に、物標探査器7の基準軸のずれが発生しているものとみなすことにより、基準軸のずれが発生したことを精度よく検出することが可能となる。
(もっと読む)
絶対速度推定装置
【課題】速度出力のためのデータを所得した時間にずれが存在しても、検出対象物の絶対速度を正確に推定することができる絶対速度推定装置を提供する。
【解決手段】取得したデータから対象物Tの相対速度Ttを出力する相対速度出力手段104と、センサ13〜15から出力されるデータから自車両1の絶対速度Vmを出力する自車速度出力手段105と、手段104,105が同期して出力した相対速度Vt及び自車速度Vmを求めるためにそれぞれ利用したデータを取得した時間の推定ずれ量Dを取得するずれ量取得手段106と、推定ずれ量Dだけ時間をずらせて相対速度Vsに自車速度Vmを加算して求めた対象物Tの推定絶対速度Vを出力する絶対速度推定手段107とを備える。ずれ量取得手段106は、複数の対象物Tiのうち、各対象物Tiの相対速度Vtiと自車速度Vmとの差が0となる対象物Tiの数が最大となるずれ量dを、推定ずれ量Dとして取得する。
(もっと読む)
光波距離測定方法及び光波距離装置
【課題】パルス光を利用した光波距離測定に於いて簡単で而も高精度の測距が行える光波距離測定方法及び光波距離装置を提供する。
【解決手段】測距光路と、内部参照光路と、パルス光を発するパルス発光光源と、パルス光を測距パルス光と内部参照パルス光とし、測距パルス光及び前記内部参照パルス光を受光して受光信号を発する受光検出器6と、該受光検出器からの受光信号に基づき測定対象物迄の距離を演算する計測部4とを具備し、該計測部は、内部参照パルス光と測定対象物で反射された測距パルス光との受光時間差に基づき粗測距を行い、前記受光検出器が出力する内部参照パルス光の受光波形、測距パルス光の受光波形をそれぞれフーリエ変換し、複数の周波数成分に分解し、得られた周波数成分毎に位相差を求め、位相差から得られる時間差に基づき精密測距を行い、粗測距と精密測距とを加算して測定対象物迄の距離を測定する。
(もっと読む)
21 - 40 / 450
[ Back to top ]