
Fターム[2C150EC03]の内容
Fターム[2C150EC03]の下位に属するFターム
Fターム[2C150EC03]に分類される特許
121 - 140 / 176
アクセサリー玩具
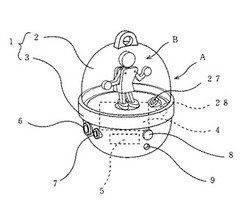
【課題】音響信号のレベルの検出結果に基づいて予め設定された動作パターンでモータの回転を制御し、フィギュア体を動かすという簡単な構成で製造コストを抑えながらフィギュア体にリアル感のある表現をさせることができるアクセサリー玩具を提供すること。
【解決手段】アクセサリー玩具Aは音響機器から入力された音響信号のレベルを検出してモータ26の回転を制御する制御部5と、該モータ26の回転に連動して回転する円盤20と、該円盤20上に立設したフィギュア体Bとを備え、上記モータ26の動作パターンはメモリに記憶され、上記制御部5は音響信号を検出したときは、読み出した動作パターンに基づいて上記モータ26を動作させ、音響信号が検出できないときは上記モータの動作を一時停止し、選択した動作パターンが完了するまで同一の動作パターンを実行するようにした。
(もっと読む)
アクションうちわ

【課題】扇部の一部に形成された切欠き部内でキャラクタ等の回転体を回転させることによって使用者の娯楽に供することができる安価なアクションうちわを提供すること。
【解決手段】扇部3の一部を切り欠いて切欠き部3aを形成し、該切欠き部3a内に回転体8を回転可能に収納保持し、該回転体8を切欠き部3a内で回転させる回転手段を設けてアクションうちわ1を構成する。ここで、前記回転手段は、前記回転体8に固定された第1の磁石10と、該第1の磁石10に対向配置された第2の磁石と、該第2の磁石を回転させてそのN,S極を交互に反転させるダイヤル14を有する。
(もっと読む)
コマ玩具
【課題】コマ本体が回転しても、コマ本体の上方に配置した保持部を有する形象体が、コマ本体からの回転の影響を受け難くくし、コマ本体が回転中に形象体を視認しやすくするコマ玩具を提供する。
【解決手段】回転コマ軸と前記回転コマ軸に軸止したフライホイール部と形象体とからなるコマ玩具であって、形象体の内部にピボット受け部が形成され、前記回転コマ軸の上方先端は、錐形状に形成されている。
(もっと読む)
模型四輪駆動車
【課題】動力系統の軽量化、低重心化を実現し走行性能の向上を図るとともに、さらに、よりコンパクトな構造の動力系統を備えた車体からなる模型四輪駆動車を提供する。
【解決手段】1台の電気モータ2の前後両方向に駆動軸21、22を設け、前方の駆動軸21を前輪駆動シャフト4に接続するとともに、後方の駆動軸22を後輪駆動シャフト5に接続した。前方の駆動軸21は、減速ギヤ31aを介して前ドライブシャフト31の一端に接続され、この前ドライブシャフト31の他端は、デフギヤなど方向変換ギヤ41を介して前輪駆動シャフト4に接続されている。後輪5a、5aに係る動力系統も、前輪4a、4aの場合と同様である。
(もっと読む)
模型自動車
【課題】 本発明の目的は、シャーシのサイズを規格内とし、所定のサイズのモータやバッテリーを使用しつつ、シャーシの横幅を狭くすることができる構造のRCカーを提供することである。
【解決手段】 本発明のRCカー1は、長細いバッテリー22と、バッテリー22から給電されると共に送信機23から無線送信される制御信号を受信する受信機28と、制御信号を増幅する動力用モータアンプ26と、動力用モータアンプ26で増幅された制御信号によって回転が制御される動力用モータ14と、これらの部品が配設されるシャーシ2と、前記シャーシ2の前部に配設され動力用モータ14によって駆動される一対の前輪4と、シャーシ2の後部に配設され動力用モータ14によって駆動される一対の後輪6とを備える。さらに、バッテリー22の長手方向の中心線がシャーシ2の長手方向の中心線A上に位置するように、前記バッテリー22を前記シャーシ2に配設する。
(もっと読む)
浮遊体及び給電装置
【課題】 自ら羽ばたく浮遊体を得る。
【解決手段】 浮遊体31に主翼動力装置56を設ける。主翼動力装置56により主翼15に取り付けられたひも199を巻き取り、或いは、解き放つことにより、主翼15が羽ばたく。主翼動力装置56は、モータ65と歯車43,46と巻き取り軸196とから構成される。主翼15はトーションバネ583等が接続され、弾力性があり、常に一定の形を保とうとする復元力がある。従って、主翼15は、糸199により引っ張られて羽ばたいた後、モータ65を逆回転させることによって元の形状に戻る。これを繰り返すことにより自ら羽ばたく浮遊体を得ることができる。
(もっと読む)
ゼンマイ駆動機構
【課題】初期状態からの使用期間の経過に応じ、表示などの動作や強制的に運転を停止する動作をなすことのできる機構を備えたゼンマイ駆動機構を提供する。
【解決手段】巻き締められたゼンマイばね11が伸びる際に発する駆動力を、出力軸4から回転運動として取り出すことのできるゼンマイ駆動機構において、ゼンマイばね11を巻き締めることによって上記の駆動力を蓄えることができ、この駆動力の放出により回転運動がなされる駆動手段1と、出力軸へ上記の回転運動を伝達する伝達手段2と、上記の伝達に当たり、回転運動を増減速可能な調速手段3とを備えたものであり、上記の各手段1〜3に加え、駆動手段1の回転運動を受けて、一定周期毎にステップ動作をなすことのできるステップ手段5を備えたことを特徴とする、ゼンマイ駆動機構を提供する。
(もっと読む)
3輪車玩具の方向制御装置
【課題】 高速あるいは急な方向変換をする場合でも、安定した走行ができる新たな機構の3輪車玩具の方向制御装置を提供する。
【解決手段】 車体フレーム11と、車体フレーム11の一方側に取り付けたキャスタ軸14に回動可能に取り付けたフォーク部15と、フォーク部15の下端部に回転可能に取り付けた車輪12と、車体フレーム11の走行方向の他方側に一端部側を回動可能に取り付けた左右の車輪支持部17と、左右の車輪支持部17の他端部側にそれぞれ設けた左右の車輪13と、左右の車輪13を回転駆動させる駆動部18と、左右の車輪13間に高低差を生じさせる車輪上下機構20と、送信機26から送信される制御信号を受信して駆動部18及び車輪上下機構20を駆動するための受信機40及び各部へ電源を供給する電池46とを備える。
(もっと読む)
魚ロボット構造
【課題】 尾鰭を含む胴後部分がしなやかに揺動し、また浮上沈降時の動きが容易に制御可能である等、より自然魚に近い挙動をする魚ロボットを提供する。
【解決手段】ゴム様弾性体の外皮11で覆われ、水へ浸漬されると、剛体に閉じ込められた空気を除く、前記外皮11内の空気が、その外皮11内に進入する水によって容易に排出されるよう、前記剛体によって閉じ込められた部分を除く残りの部分がそれを包む外皮11の外と連通している。また、前記尾鰭16を含む胴後部15内に、弾性変形容易で左右に遥動することが可能な一枚の遥動板25、その部分の外皮11を内面から支持すると共に、容易に湾曲し、遥動することが可能な肋骨状部分30を備え、前記駆動機構20がその遥動板25、肋骨状部分35を介して前記尾鰭16を含む胴後部15を遥動させるよう構成されている。
(もっと読む)
魚ロボット
【課題】 尾鰭や胴後部分の揺動機構が簡単で、しかも水槽内を例えば鰻のように複雑な揺動も可能であって、より自然魚に近い挙動をする魚ロボットを提供する。
【解決手段】 胴後部40内に内蔵された左右対称の複数の揺動体が、それぞれその前端の鉛直のピンPを介し、その直前の非揺動体31又は他の揺動体に、直列に連結され、前記各鉛直のピンPの周り、左右に回動するよう構成されたものであって、前記非揺動体31及び複数の揺動体41,42上に、鉛直軸の周りに左右に回動可能な複数のギアよりなり、且つその一つが原軸ギアGmとして回動すると、その回動が残りのギアGに順次伝えられるよう構成されたギア列が設けられ、前記原軸ギアGmを除く残りのギアGの一部が従軸ギアGsとして、各遥動体41,42前端の鉛直のピンPの周りにその各揺動体41,42を左右に直接回動させるよう構成されている。
(もっと読む)
魚ロボット
【課題】 水深を一定又は略一定に保持するための浮沈制御機構が簡単で、その制御が容易な魚ロボットを提供する。
【解決手段】空気が封じ込まれたタンク61へ付設のポンプ63によって周囲の水が送り込まれ、沈降するよう構成された魚ロボットの水深を検知する水深センサ67による水深検出値Dtが目標水深Dsより小さく、且つ沈降速度Vが設定値Vs未満であれば、停止中のポンプ63が起動されるか又は運転中のポンプ63が引き続き運転されるよう制御され、他方前記水深検出値Dtが目標水深Dsより小さくても沈降速度Vが設定値Vs以上であるか、又は他方前記水深検出値Dtが目標水深Ds以上であれば、運転中のポンプ63が停止されるか又は停止中のポンプ63が引き続き停止されるよう制御される。
(もっと読む)
電動模型自動車
【課題】リア駆動式の4輪駆動車、フロント駆動式の4輪駆動車、または前後輪同時駆動式の4輪駆動車に簡単に設定することのできる電動模型自動車の提供。
【解決手段】
モータ駆動される一対の車輪13を軸支した第1の組立体6と、一対の車輪14を軸支した第2の組立体7と、前記第1の組立体または前記第2の組立体を、後方の第1の取付位置2または前方の第2の取付位置3に任意に着脱可能にする車体1と、を備え、前記第1の組立体および前記第2の組立体を、前記第1の取付位置または前記第2の取付位置のいずれかに取り付けた後か、または2つの前記第1の組立体を、前記第1の取付位置および前記第2の取付位置に取り付けた後に、前記車体とカバー60の間で保持可能にする。
(もっと読む)
自動走行玩具車
【課題】 水平回転する円板状武器を有する自動走行玩具車を、下部車体と上部車体と円板状武器との三部材で、組立ておよび分解が容易に形成した。
【解決手段】 車輪付きの走行可能な下部車体Aと上部車体Bとを、各後部間に設けたスペーサを介して着脱自在に連結すると共に、そのスペーサ前方の上記両車体間に、下部車体A前部から起立する縦軸7上部へ固着させた回転輪21を位置させ、又該回転輪の軸線上方部分を、上部車体B前部下面で着脱自在に軸支させ、上記回転輪21外面へ円板状武器Cを、該武器中央部に穿設した嵌合孔61を嵌合させて着脱自在に装着させ、該武器を水平回転させ乍ら車体が前進可能に形成した。
(もっと読む)
可動軸駆動装置
【課題】脚式歩行ロボット等のロボットに用いた場合に、そのロボットの総重量や大きさを増加させることなく、関節としての可動軸に配される駆動モータのエネルギ効率を向上させることにある。
【解決手段】互いに隣接する二つのリンクを1自由度で相対運動させる可動軸を駆動する装置において、互いに異なる最高出力の二台のモータ11,12およびそれらのモータで駆動されて各々前記可動軸を駆動する互いに異なる減速比の二台の減速機14,15と、前記可動軸の必要駆動トルクと回転数とに応じてエネルギ効率が最高になるようにトルク分配値を演算するマイクロコンピュータ19と、前記演算したトルク分配値に応じて前記各モータ11,12を駆動する電流制御ドライバ17,18とを具えてなる、可動軸駆動装置である。
(もっと読む)
ロボット装置及びその表情制御方法
【課題】
本発明は、簡易な構成で、ユーザとの間で適切なインタラクションを行い得るロボット装置及びその制御方法を実現するものである。
【解決手段】
表情生成部106が、ユーザ発話やロボット装置自身の発話に応じて表情表出を制御することにより、あたかもロボットが発話に応じた感情を抱いているかのような自然な印象をユーザに対して与えることができる。
(もっと読む)
発光玩具
【課題】機械的な動作を必要とせず顔の表情を変化させることができ、しかも作動しないときには卓上のアクセサリーとして飾ることができる癒しの心を備えた発光玩具を提供すること。
【解決手段】玩具体1の内部に複数の発光体Lを設けるとともに、玩具体1の外壁面に開口部13を設け、上記発光体Lの光を上記開口部13まで導く導光部材12を該発光体Lに夫々対応して配置するとともに、上記外壁面を透光性を有するカバー部材14で覆い、上記発光体Lの点灯状態を制御部6で制御して、上記発光体Lの発光時にのみ上記開口部13の形状が外部から視認できるようにした。
(もっと読む)
棒状構成部材及び棒状構成部材を利用した運動変換機構
【課題】学校教育における創作玩具やロボットコンテストに向けてのロボット製作において、製作者の自由な発想を具現化することができる、より自由に、多用途に使用することができる棒状構成部材及び運動変換機構を提供する。
【解決手段】玩具に使用される棒状構成部材10であって、長さ方向に沿って複数の孔部11が所定間隔をおいて設けられると共に長さ方向に沿ってガイド部12が設けられている。
(もっと読む)
連続給弾機構を有するマガジンと連続発射機能を有する玩具銃
【課題】本発明は、マガジンを銃にセットするだけで、銃側の発射動作に合わせるようにマガジン側の球状弾送り出し機構を自動的に瞬時に駆動させ、発射された球状弾の発数に見合うだけの球状弾送り出しを行い、発射動作の停止に伴ってマガジン側の球状弾送り出し機構も自動的に停止する、というような、駆動力源を内蔵しないタイプの着脱自在式多弾数高速連射用マガジンを提供することを課題とする。
【解決手段】高速連続射撃に瞬時に追従できるだけの球状弾送り出し機構をマガジン側に設け、その球状弾送り出し機構を、玩具銃側が有する駆動力を伝達利用して作動させることにより、高速連続射撃に対応した自動強制給弾を達成する。
(もっと読む)
走行装置、及び動力制限機構
動力源(3L、3R)からの動力を動力伝達機構(4L、4R)を介して車軸(8)に伝達して該車軸(8)に接続された車輪(5L、5R)を回転させる走行装置(1)において、車輪(5L、5R)がこれらの車輪と車軸(8)との間で伝達されるトルクを制限する動力制限機構(9、10)を備える。  (もっと読む)
(もっと読む)
走行玩具
【課題】電気的なエネルギーを一切必要とせず、いつでも自力走行モードと手押し走行モードとの2種類の走行モードを自由に選択して走行玩具遊びを楽しむことができる走行玩具を提供すること。
【解決手段】上記走行玩具Aは、駆動輪4を駆動するプルバック式のゼンマイユニット5を備え、上記駆動輪4と上記ゼンマイユニット5とは中継歯車16で連係し、該中継歯車16は軸方向にスライド可能に配置され、上記中継歯車16を一方にスライド移動させた時には上記駆動輪4は上記ゼンマイユニット5に連係し、他方にスライド移動させた時には上記駆動輪4と上記ゼンマイユニット5との連係が解除されるようにし、切替え装置20の切換操作により上記中継歯車16をスライド移動させ上記駆動輪4とゼンマイユニット5との係脱を行なうようにした。
(もっと読む)
121 - 140 / 176
[ Back to top ]