
Fターム[2C150EC03]の内容
Fターム[2C150EC03]の下位に属するFターム
Fターム[2C150EC03]に分類される特許
61 - 80 / 176
遠隔操作のオートバイ模型
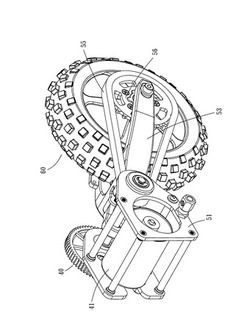
【課題】高い安定性および操縦性を得る遠隔操作のオートバイ模型を提供する。
【解決手段】遠隔操作のオートバイ模型は、車体と、車体の前部および後部にそれぞれ配置された前輪15および後輪60と、動力出力装置40とを備える。後輪60は、固定シャフトと、ホイールリムセットと、ホイール本体と、ギヤホイールおよび複数の遊星ギヤを有する遊星ギヤセットと、ギヤホイールを単一方向で回転させる一方向回転部材と、遊星ギヤに接続したクランチセットと、クランチセットを囲むように配置されたフライホイールセットとを有する。
(もっと読む)
ヘリコプタ玩具

【課題】機体を安定して上昇させることができ、上昇後に機体を操作することが容易な構成であり、また、構成がシンプルであるために製造コストが安いヘリコプタ玩具を提供する。
【解決手段】本体の両側に延在する少なくとも一組の主翼の端部に配置される少なくとも一組のメインロータと、前記本体の後方に延在する尾部に配置されるテールロータと、本体内部に設けられて各メインロータの回転速度とテールロータの回転速度とをそれぞれ独立して個別に調節するコントローラとを備え、前記メインロータの中心軸が両主翼に対して両ロータがそれぞれ本体から離隔する方向に傾斜するように配置されることを特徴とする。
(もっと読む)
コイン判別装置及び貯金箱
【課題】集中的に配置された検出センサにより、シュートにて拘束されたコインを判別する。
【解決手段】コイン判別装置100は、第1ケース120及び第2ケース130と、第1ケース120と第2ケース130とにより挟まれる、断面がコの字型のシュート110とで構成される。シュート110には、下に行くに従って両側が狭くなる傾斜部114、115を有する。この傾斜部114、115の少なくとも一方としてコイン退避部材131が設けられる。コイン退避部材131は、モータにより動作され、当接面131AにコインCが当接された当接状態と当接状態を解放した状態とを切換える。板116及び当接面131Aに当接されて拘束されたコインCの近傍に集中的に配置された検出センサにより、コインCの種類が判別される。
(もっと読む)
走行玩具
【課題】走行玩具自体を直接衣服等に吊り下げて携行したり、走行玩具自体をキーホルダーとして使用可能な走行玩具の提供を図る。
【解決手段】走行輪12,13を備えた玩具本体10に形成した凹欠部14と、該凹欠部14の端部間に跨って接続した引掛具20と、で環状の吊設用連結部15が構成可能である。
(もっと読む)
電動銃における機械式通電停止装置
【課題】給弾経路に弾丸がなくなったときには、弾丸を発射させる駆動部の回路を遮断して通電を機械式に停止する。
【解決手段】
給弾経路13に移動可能に配置されかつ装弾部20へ弾丸Bを送るために付勢された玉押し部材22と、玉押し部材側と一端部にて係合し、連動するフォロワー部材40と、フォロワー部材の動きに伴い通電時の位置から遮断時の位置への移動の過程においてタペット部材35と係合し、タペット部材の移動に伴いスイッチ57をオフにするカットオフ部材50と、駆動部のピストンの移動に伴い後退して給弾口21を開く先端部分を有しかつその給弾口を閉じる方向への付勢力により上記カットオフ部材を動作させる上記タペット部材及びカットオフ部材との係合により移動して接点が開き、リセット操作により接点を閉じる上記のスイッチとを備えて構成する。
(もっと読む)
ヘリコプタのロータ
【課題】部品点数・部材量が少なく小型・軽量性に優れ、耐久性、性能維持性に優れたヘリコプタのロータを提供する。
【解決手段】回転翼10のピッチ動作とスタビライザ11の揺動動作とをリンクさせるリンク機構は、回転翼のピッチ軸から離れて回転翼に固定配置された第一当接子a1と、ピッチ軸から離れて回転翼に固定配置され、第一当接子とピッチ軸を基準に逆側の等距離に配設された第二当接子a2と、スタビライザの揺動軸から離れてスタビライザに固定配置された第三当接子a3と、揺動軸から離れてスタビライザに固定配置され、第三当接子と揺動軸を基準に逆側の等距離に配設された第四当接子a4とを有する。少なくとも飛行時に、第一当接子と第三当接子、第二当接子と第四当接子とがマスト軸方向の押圧力成分を有して当接し、滑動することにより、ピッチ動作と揺動動作とをリンクさせる。
(もっと読む)
走行玩具
【課題】車体を伸長させたバギータイプの自動車形状からロボット形状へ、また、ロボット形状からバギータイプの自動車形状へと変形させることができる走行玩具を提供する。
【解決手段】前輪を備えた前方車台と、後輪を備えた後方車台と、前記前方車台と前記後方車台とを連結し、かつ車台を折り曲げるための車台折曲機構とから構成され、前記前輪と後輪の少なくとも一方を駆動する駆動手段を設け、さらに前記車台折曲機構は、前方部が前記前方車台の中間部に回動可能に嵌合され、かつ後方部が前記後方車台と回動可能に連結される車台折曲手段を含み、かつ前記前方車台の長さは少なくとも前記後方車台の長さよりも長いことにより、前記車台折曲手段を回動させて車台を折曲した際に、前記前方車台の後端部が前記後方車台よりも高い位置となるまで前記前方車台が起き上がる。
(もっと読む)
ヘリコプター玩具
【課題】 上方の障害物に接近した際に自動で降下して衝突を回避するヘリコプター玩具を提供する。
【解決手段】 ヘリコプター玩具1は、送信機からの信号によって遠隔操縦されるヘリコプター玩具1であって、機体10と、機体10の上方へ突出するように取付けられ機体10に搭載されたメインロータ用駆動モータにより回転駆動されるロータシャフト30,40と、ロータシャフト30,40の回転中心軸と直交するようにロータシャフト30,40に取付けられたロータブレード34,44と、機体10に搭載された検出手段2と、制御部と、を備え、検出手段2は、機体10の上方向に向けて配置され機体10の上方に存在する障害物との距離に応じた信号を生成するように構成されており、制御部は、検出手段2からの信号に基づいてメインロータ用駆動モータ80の回転速度を決定して所定の制御信号を生成し当該制御信号をメインロータ用駆動モータ80に送出するように構成されてなることとする。
(もっと読む)
揺動玩具
【課題】基台自体が揺動する意外性のある揺動玩具を提供すること。
【解決手段】基台である殻体の内部に、下部に永久磁石又は電磁石のいずれか一方の部品が設けられ上部の軸を中心に動作可能な振り子と、前記一方の部品を挟み込むように間隔をもって設けられた前記永久磁石又は前記電磁石の他方の部品と、前記電磁石を制御して磁力により前記振り子を前記軸を中心に動作させて前記殻体を揺動させる制御手段とを備えたことを特徴とする。
(もっと読む)
揺動玩具及び揺動玩具の組立方法
【課題】興趣性に富んだ揺動玩具を提供すること。
【解決手段】殻体の内部に、永久磁石が付設された振り子と、振り子に磁力を作用させるための電磁石と、電磁石を制御するための電磁石制御手段とを設け、殻体の内部で振り子の動作方向を変更できるように構成するとともに、殻体の内部で、振り子の動作方向に合わせて電磁石の取付位置を変更できるように構成した。
(もっと読む)
走行玩具
【課題】 安価にして小型且つ軽量で遊戯者が容易に取り扱うことのできるフライホイールを用いた自走式走行玩具を提供する。
【解決手段】 走行玩具1は、フライホイール7の回転を歯車列によって駆動輪22に伝達することにより自走する走行玩具1であって、歯車列は、複数の歯車を有してフライホイール用入力歯車42の回転をフライホイール軸に取付けられた最終歯車に伝達するフライホイール用歯車列と、駆動輪22の駆動軸を回転させる駆動輪用歯車2と、該駆動輪用歯車2とフライホイール用入力歯車42との間に配置される少なくとも1個の制御伝達歯車3と、で構成され、制御伝達歯車3はフライホイール用入力歯車42と駆動輪用歯車2と回転伝達を遮断するようにフライホイール用入力歯車42と駆動輪用歯車2の少なくとも一方の歯車との噛合いが解除可能とされると共に、制御伝達歯車3を噛合い解除可能とされた歯車と噛合うように移動させる制御部材50を有することとする。
(もっと読む)
歩行ロボット
【課題】従来から行われるアクチュエータによる能動的歩行だけではなく受動的歩行を積極的に行うことで、歩行ロボットの歩行に要するエネルギーを低減し、効率的な歩行の実現を図る。
【解決手段】歩行ロボットにおいて、その歩行と連動して、所定の閉空間内で制御用空気の動きを制御することで、該歩行ロボットの歩行をアシストする空気回路部を備える。そして、空気回路部は、歩行ロボットの歩行時において脚が立脚状態から遊脚状態に移行する際に、該脚を構成する各リンク部材の各関節部を介して行われる相対位置変化によって、制御用空気を介して該歩行のエネルギーの一部を回収する歩行エネルギー回収部と、歩行ロボットの歩行時において、脚が遊脚状態から立脚状態へ移行する際に、歩行エネルギー回収部によって回収された歩行エネルギーを開放し、該脚の立脚状態への移行をアシストする歩行アシスト部と、を有する。
(もっと読む)
揺動玩具
【課題】 使用者が癒されるという感情を想起させるような緩やかな動作を行う揺動玩具を提供する。
【解決手段】 揺動玩具1は、胴体部2と、該胴体部2の上部に配置される頭部3と、を備え、胴体部2は、その内部に頭部3を回転可能に頭部支持軸により支持する頭部支持部材と、駆動源と、プーリを介する減速機構と、リンク機構と、制御手段と、を有し、リンク機構は、減速機構の最終段に設けられる偏心カムと、頭部3に固定されるリンクピンと偏心カムとに枢結されるリンク部材と、から成り、制御手段が生成する制御信号に基づいて駆動源を駆動し、該駆動源の回転力が減速機構を介して偏心カムに伝達され、該偏心カムが円運動をすることにより、リンクピンが上下動し、頭部3が頭部支持部軸を回転中心として胴体部2に対して左右方向に揺動するものとする。
(もっと読む)
走行玩具
【課題】 小型且つ軽量で遊戯者が容易に取り扱うことのできる安価にしてウィリー走行が可能な走行玩具を提供する。
【解決手段】 走行玩具1は、本体2と、該本体2の前側に本体2に対し弾性体を介して保持された前輪6と、本体2の後側に取付けられた後輪7と、後輪7を駆動する後輪駆動部103aと、を備え、前輪6と本体2が相対的に近づく方向に手動による圧縮操作を加えたとき弾性体の圧縮が可能に構成されており、手動により圧縮が加えられたとき弾性体の圧縮状態を維持する係止機構31を更に備え、走行開始前に手動による圧縮操作を行って弾性体を圧縮し、係止機構31によって弾性体の圧縮状態を維持し、前輪6と後輪7による走行状態にあるとき、送信機からの遠隔操作によって係止機構31を開放し、弾性体を圧縮状態から開放したとき、前輪6に付勢力を与えることで前輪6を走行面60から浮上させ、後輪7による走行姿勢へ移行するように構成されて成ることとする。
(もっと読む)
動作玩具
【課題】意外性を有し、ユーモアに富んだ動作玩具を提供すること。
【解決手段】並設された複数の殻片を有し、隣接する前記殻片同士が屈伸可能に連結され、屈伸によって、丸まった状態である縮退状態と開放された状態である展開状態とを取り得るように構成された殻体と、付勢力によって前記殻体を前記縮退状態とさせる付勢手段と、を備え、前記殻体の一面側には展開手段が設けられ、前記展開手段は、前記付勢手段による付勢力に抗して前記殻体を前記一面側から押圧して該殻体に一時的かつ間欠的に前記展開状態を取らせるように構成されている。
(もっと読む)
駆動装置
【課題】 筐体を合理的に駆動するとともにスピーカの音響効果を向上してなる駆動装置を得ること。
【解決手段】 下部筐体210と、下部筐体の上部に設けられた上部筐体220と、上部筐体を下部筐体に対して回転可能に支持するシャフト300と、上部筐体の内部に配置されるとともにシャフトを中心に上部筐体を下部筐体に対して回転する駆動手段400と、上部筐体の内面に支持されたスピーカ500とを備え、上部筐体がスピーカのエンクロージャとして作用するものであり、上部筐体が回転すると同時にスピーカから音を発生するようにした。
(もっと読む)
駆動装置
【課題】 筐体を合理的に駆動するとともにその内部構造を簡素化してなる駆動装置を得ること。
【解決手段】 下部筐体210と、上部筐体220と、上部筐体を下部筐体に対して回転可能に支持するシャフト300と、上部筐体の内部に配置されるとともにシャフトを中心に上部筐体を下部筐体に対して回転する駆動手段400とを備え、下部筐体は、所定の形状の第1下部筐体部材211及び第2下部筐体部材212を組み付けてなるとともに、それらの筐体部材に跨るプレート部材213を備え、シャフトの下端部は、第1下部筐体部材及び第2下部筐体部材の間に挟み込むものとし、第1下部筐体部材及び第2下部筐体部材には、シャフトの下端部を嵌装する一対の半円筒部211a,212aをそれぞれ設け、プレート部材は、一対の半円筒部を合わせた状態で挿入する孔部213aを備えた構成の駆動装置である。
(もっと読む)
飛翔装置
【課題】昆虫のようにホバリングをして、急旋回、急上昇など繰り返して飛ぶことが可能な飛翔装置を提供することを目的とする。
【解決手段】前後に長い支持本体5に、上下揺動可能に支持される左右の羽体2を前後方向に単又は複数対設け、各羽体2を駆動するための駆動手段6を設けてなる飛翔装置1で、全重量と、前記羽体2の面積との比が0.11420m2/N以下であることを特徴とする飛翔装置。
(もっと読む)
模型玩具及びその駆動ユニット
【課題】 本発明は、砲塔等を回転すると共に、砲塔等の回転とは異なる方向に砲身等を移動することができる駆動ユニットを備えた模型玩具を提供することを目的とする。
【解決手段】 本体と、本体に対して回転可能に取り付けられる砲塔と、前記砲塔に搭載される砲身とを備える模型玩具において、砲塔を回転する第1モータ509と、砲身を傾動するための上下動シャフト513と、上下動シャフト513を移動する第2モータ511とを有する駆動ユニット500を備える。
(もっと読む)
ラジオコントロールカーの操舵制御装置
【課題】 ポテンションメータを回転させる減速ギアを介してサーボモータのポテンションメータ軸を回転させると、減速ギアでの各ギアどうしの隙間等による噛合度合いの関係でタイロッドの変位量とポテンションメータ軸の回転量に誤差が生じ、送信機より指令した前輪の操舵角と実際の前輪の操舵角とにずれが生じるといった問題があった。
【解決手段】 受信機よりの制御信号で制御されるモータ91の回転量を減速ギア94を介してタイロッド4を変位して前輪の操舵角を変化させ、該タイロッドの移動量をポテンションメータ92に直接伝達して出力を変化させることで、送信機よりの操舵角信号に応じて前輪の操舵角を制御するラジオコントロールカーの操舵制御装置である。
(もっと読む)
61 - 80 / 176
[ Back to top ]