
Fターム[2F065CC25]の内容
光学的手段による測長装置 (194,290) | 対象物−個別例 (8,635) | 電子部品関連 (997)
Fターム[2F065CC25]の下位に属するFターム
ハンダ (216)
ボンディングワイヤ;リード (37)
実装状態 (111)
Fターム[2F065CC25]に分類される特許
21 - 40 / 633
孔形状検査方法および孔形状検査プログラム
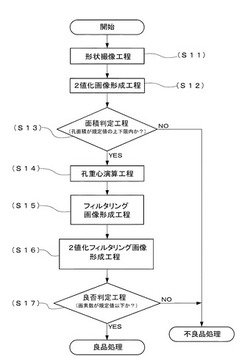
【課題】被検出形状に縁部における輝度変化を除去し、欠けや異物の検出を確実に行える孔形状検査方法および孔形状検査プログラムを提供する。
【解決手段】孔形状良否を判定する孔形状検査方法およびプログラムであって、前記孔の孔形状撮像工程と、前記孔形状画像の2値化画像形成工程と、前記孔の面積が既定値であるかを判定する孔面積判定工程と、前記孔の内形状の孔重心を求める孔重心演算工程と、前記孔形状画像に前記孔重心を中心とする同心フィルターをかけ、前記孔重心を中心とする同心形状上の画素の平均輝度と、1画素の画素輝度と、の差によるフィルタリング画像形成工程と、前記フィルタリング画像の2値化フィルタリング画像形成工程とを有し、前記2値化フィルタリング画像の画素数が所定の値以下である場合、前記孔を良品と判定する良否判定工程を有する孔形状検査方法、およびその検査方法をコンピューターに実行させるプログラム。
(もっと読む)
高速光学センサ検査システム

【課題】電子部品を、高速に検査する光学システムを提供する。
【解決手段】センサは、カメラのアレイに対してノンストップで移動する加工対象物に関する画像データを取得するように構成されたカメラのアレイを含む。カメラのアレイが画像データを取得するとき照明のパルスを提供するために照明システムが配置されている。少なくともいくらかの画像データは、加工対象物上のスキップマーク又はバーコードに関するデータを含む。又取得した複数の画像により立体画像化する。
(もっと読む)
画像形成装置および画像形成方法ならびに部品実装装置
【課題】安定した3次元認識画像を形成して正しい部品認識結果を得ることができる画像形成装置および画像形成方法ならびに部品実装装置を提供する。
【解決手段】計測対象面への入射方向を挟んで対称に配置され受光面の計測対象面に対する傾斜角度が各対毎に相異なる2対の位置検出素子群25A,25Bを有し、走査光の計測対象面からの反射光の受光位置を検出する位置検出部25と、各位置検出素子が受光する光量が所定の範囲内にあるか否かを判定する受光量判定部34と、同一の位置検出素子群に属する位置検出素子による反射光の受光位置検出結果の差異の大きさが所定の基準値以下であるか否かを判定する受光位置検出結果判定部35とを備え、位置検出部25の受光位置検出結果に基づき受光量判定部34および受光位置検出結果判定部35の判定結果を加味して計測対象面の3次元認識画像を形成する構成とする。
(もっと読む)
液晶アレイ検査装置およびライン座標位置算出方法
【課題】表示パターンのフレームサンプリングから得られた撮像画像(シグナルイメージ)の収縮、膨張等のフレーム間の幅に不均等な部分が生じた場合であっても、各ラインの座標位置を正確に算出し、液晶パネルのピクセル位置を正確に算出する。
【解決手段】表示パターンを撮像して得られる撮像画像(シグナルイメージ)において、実検出ラインの座標位置を検出した後、次に座標位置を検出する実検出ラインを求める際に、前の実検出ラインの信号強度パターンと比較することによってラインの良・不良の検出、および、不良ラインの収縮又は膨張の判定を行い、次の実検出ラインを求める。ラインの良・不良を検出し、不良ラインの収縮・膨張の判定することによって、ライン幅にばらつきが生じた場合であっても、各ラインの座標位置を正確に算出する。
(もっと読む)
圧着端子の検査装置およびそれを備えた電線処理装置
【課題】圧着端子をより正確に検査することができ、構成の簡単化または検査時間の短縮を図ることのできる圧着端子の検査装置を提供する。
【解決手段】検査装置40は、第1検査ユニット41、第2検査ユニット42、および第3検査ユニット43を備える。第1、第2、第3検査ユニット41,42,43は、それぞれ連続端子30の移動経路から外れた位置に配置された第1、第2、第3投光装置および第1、第2、第3受光装置61,62,63を備える。第1投光装置は、端子35の長手方向に延びる帯状の第1の光71を照射する。第2および第3投光装置は、端子35の長手方向と直交する方向に延びる帯状の第2の光72を照射する。コンピュータは、第1、第2、第3受光装置61,62,63の各受光量に基づいて、端子35の良否を判定する。
(もっと読む)
計測装置、検査装置及び計測方法
【課題】高速に搬送される計測対象の物体の3次元形状計測を高精度に行う。
【解決手段】プロジェクタ2は、Y軸方向に並ぶ明暗ピッチによりコード化されたスリットパターンがX軸方向に複数配列され、Y位置が同じビットデータを各スリットパターンから抽出してX軸方向に沿って並べたときのビット列の値がY軸方向に沿って線形に変化するように各スリットパターンがコード化されたスリットパターン像を、物体Mの搬送経路上に投影する。撮像装置3は、物体MがX軸方向に搬送されスリットパターン像を通過する様子を、プロジェクタ2とは異なる角度から撮像する。コード生成部6は、撮像された動画像に基づいて、物体M上における計測対象の位置が、各スリットパターンにそれぞれ到達したときの明暗をコード化する。高さ算出部7は、コード化されたコードに基づいて、計測対象の位置の高さを算出する。
(もっと読む)
画像処理方法及び画像処理装置
【課題】種々の形状のマークの識別を可能とする。
【解決手段】電子部品Cを基板Kに実装する際に、電子部品又は基板に付されたマークMを撮像した撮像画像データによるマークの識別に用いられる画像処理方法であって、マークの撮像画像データから当該マークの中心位置を特定する中心特定工程と、マークの中心位置からマークの撮像画像データの極座標変換データを取得するデータ変換工程と、極座標変換データにおける背景とマークとの境界線の形状的特徴からマークの形状を判別する形状判別工程と備えている。
(もっと読む)
計測対象の3次元表面形状算出方法及び3次元表面形状計測装置
【課題】
位相シフト方法による計測対象の3次元形状の計測では、少なくも3種類以上の位相を変えた縞パターンの投影が必要であり、縞パターンの切替、撮像の時間等の計測に時間が掛る課題がある。
【解決手段】
分離可能な異なる2色と各々位相の異なる4種類の縞パターンの2つから合成した異なる2種類の合成縞パターンを計測対象にカラー投影して撮影したカラー画像の色分離を行って撮像画像の縞パターンの位相を算出して計測対象の3次元表面形状の計測を行う。
(もっと読む)
ロボット装置
【課題】高精度なエンコーダーを用いずに、可動部の位置制御を高精度に行うロボット装置を提供する。
【解決手段】基体1と、基体1に対して駆動可能な可動部2と、可動部2を駆動するアクチュエーター3と、可動部2とともに動く部分に取り付けられた慣性センサー4と、画像を撮影し画像により慣性センサー4の位置または角度を検出する絶対位置検出部として、画像センサー5及びマーカー6と、画像センサーにより検出された位置情報の間を、慣性センサー4の信号で補間する演算部9と、を備える。
(もっと読む)
反り検査装置および反り検査方法
【課題】平板状に形成される検査対象の反り方向を簡易な構成にて検査し得る反り検査装置および反り検査方法を提供を提供する。
【解決手段】アクチュエータ12により平面部11a上に載置された平板状のセラミック基板20の外縁部22が押圧されて、フォトセンサ13により上記押圧力の解除後におけるセラミック基板20の回転が検知される場合に、当該セラミック基板20の反り方向が、外縁部22に対して中央部21が平面部11a側に凸となる反り方向(下側に凸となる反り方向)であることが検知される。
(もっと読む)
テーピング装置
【課題】。
【解決手段】照明装置100を構成する一対の照明装置100A、100Bの複数のLED101が収納溝4B内のチップ部品Aに光を拡散板102を介して均一に照射して、しかもチップ部品Aに付された丸の部分AAや文字・数字部分ABを形成する刻印の深さに応じて、確実に照射光によって前記刻印の端部により影ができるような傾斜した照射光となるように照射して、印字検査カメラ85が撮像した画像において、丸の部分AAや文字・数字部分ABとそれ以外の表面部分ACとのコトラストが大きくなって、丸の部分AAや文字・数字部分ABが黒色に、それ以外の表面部分ACは白色に撮像でき、チップ部品Aの有無、前記チップ部品の表裏、チップ部品Aの向きを検査することができる。
(もっと読む)
表面性状評価方法
【課題】被検体の表面から反射光が得られないような場合であっても、被検体の表面性状を確実に測定でき、歩留まり及び製造効率の向上を図ることができる表面性状評価方法を提供する。
【解決手段】ウエハWをセットしていない状態において、第1参照平面56で反射された第1参照光と、ウエハWをセットした状態において、ウエハWを透過して後に第1参照平面56で反射された被検光と、に基づいてウエハWの表面性状を評価することを特徴とする。
(もっと読む)
露光装置及び露光方法、並びにデバイス製造方法
【課題】移動体を精度良く駆動する。
【解決手段】 ウエハWを保持し所定面内で移動するウエハステージWSTと、所定面内と実質的に平行に配置される移動スケール44A〜44Dに、複数のヘッド48a〜48kを介してそれぞれ所定平面と交差する方向からビームを照射して、ウエハステージWSTの位置情報を計測するエンコーダシステムと、エンコーダシステムの計測情報に基づいてウエハステージWSTを制御する制御システムによって、複数のヘッド48a〜48kのうち移動スケール44A〜44Dと対向する複数のヘッド48a〜48kの数が変化するとともに、ウエハステージWSTの移動によって、複数のヘッド48a〜48kのうち位置情報の計測に用いられるヘッドが別のヘッドに切り換わる。
(もっと読む)
検査装置および検査方法
【課題】視差生成部材の設置状態を定量化すること。
【解決手段】本発明の検査装置は、スリット状の開口部を備える視差生成部材と、前記視差生成部材のスリット状の開口部に対応する明暗模様を保持する保持手段と、前記視差生成部材を通して前記明暗模様の明暗の状態を検出し、検出した明暗の状態に基づき、前記明暗模様と前記視差生成部材との角度を算出する算出手段と、を有する。
(もっと読む)
三次元画像取得装置および三次元画像取得方法
【課題】マイクロレンズとピンホールとの間にビームスプリッタを設けずともマイクロレンズを介すことなく反射光を光検出器に導くことができる三次元画像取得装置を提供する。
【解決手段】共焦点光学系を用いた三次元画像取得装置10であって、マイクロレンズ板13は、照明光を集光する複数のマイクロレンズが二次元に配設される。照明側開口板14は、マイクロレンズの集光位置に設けられた照明側開口部を有し、照明側開口部によりマイクロレンズが集光した照明光を被計測体17に向けて通過させる。偏光ビームスプリッタ15は、照明側開口板14を通過した照明光を透過するとともに、被計測体17からの反射光を照明光の光路とは異なる光路に反射する。検出側開口板21は、照明側開口部と光学的に共役な位置に設けられた検出側開口部を有し、検出側開口部により偏光ビームスプリッタ15で反射された反射光を光検出器に向けて通過させる。
(もっと読む)
形状認識装置、形状認識方法、および、そのプログラム
【課題】コネクタ等の固定部にケーブル等の可変部を加えた3次元モデルを通じて認識対象物を的確に抽出する。
【解決手段】形状認識装置120は、固定部と内部自由度を有する可変部とを含み長手軸を有する3次元モデル122を示す3次元モデル情報を保持するモデル保持部210と、認識対象物112の3次元形状を示す認識対象情報を取得する認識対象情報取得部230と、認識対象情報と3次元モデル情報とに基づき、長手軸に対して対称な2つの候補姿勢をつくり、認識対象物と、可変部の内部自由度を変化させた3次元モデルとをパターンマッチングして認識対象物の位置および姿勢を特定する認識対象物特定部234とを備える。
(もっと読む)
塗布膜の検査装置
【課題】大型ガラス基板に各種画面サイズのカラーフィルタが面付けされ、面付け余白が生じて基板端から表示領域を画定する額縁部近傍までの幅においてフォトレジストが塗布されていない基板に対しても、外観上の広域欠陥の検査を正常に行える機構を有した塗布膜の検査装置を提供する。
【解決手段】被検査体の基板を披検査体テーブルの支持ピン上に保持した状態で、基板流動方向に走査可能に移動する検査位置に対して真下の位置に配置された透過光源部から検査光を当て、被検査体を透過した透過光を、透過光源部と同じ方向に一体的に移動する検査位置に対して真上の位置に配置された撮像カメラで受光してその輝度変化を検出する塗布膜の検査装置において、前記被検査体テーブルの基板流動方向の両端部に外乱光遮断用のシャッターが設けられ、該シャッターが両端部から前記被検査体の基板の内側にむけてその遮光領域を可変に制御する機構を具備している。
(もっと読む)
マーク検出装置、基板検査装置およびマーク検出方法
【課題】透明基板に設けられたフィデューシャルマークを確実かつ容易に検出する。
【解決手段】フィデューシャルマークMが設けられた検査対象基板10の一方の面に光を照射すると共に、基板10の一方の面を撮像した撮像データに基づいてマークMを検出する際に、緑色、青色および黒色のうちのいずれかの色で形成された有色半透明シート9bを基板10の他方の面に接するように配設すると共に、少なくともシート9bに対する接触面が黒色および緑色のいずれかの色で形成された有色不透明シート9aをシート9bにおける基板10に対する接触面の裏面に接するように配設した状態において、他方の面がシート9bに接するように配設した基板10の一方の面にLED光源21から赤色光L1を照射すると共に、単色画像データを出力可能な撮像部22によって基板10の一方の面を撮像し、撮像部22から出力された単色画像データに基づいてマークMを検出する。
(もっと読む)
コレット位置検出方法及び装置
【課題】簡便に且つ精度上の制限を受け難い状態でコレットの位置を検出し得るコレット位置検出方法及び装置を提供する。
【解決手段】基準座標系において、半導体チップTのピックアップステージ4とボンディングステージ5との間の所定の座標に光センサ9を配置し、一方向にコレット80を移動させながら、コレットまたはその装着部の縁部を光センサ9で検知することにより、2つの縁部の中心である第一中央位置の座標値を検出し、一方向に直交する方向に同様の移動及び検知を行なって2つの縁部の中心である第二中央位置の座標値を検出し、第一中央位置及び第二中央位置からコレット中心の検出座標値を求め、該検出座標値に基づいてコレットの設定座標値を補正することを特徴とするコレット位置検出方法及び該方法を実施するための検出装置。
(もっと読む)
形状計測方法
【課題】計測対象物体の形状を高速かつ高精度に計測する方法を提供する。
【解決手段】4つ以上の光源からなる格子投影用光源11と、1次元格子が描かれた格子面12aを含む、格子投影用光源11に平行に配置された格子プレート12とを備える形状計測装置1を用いて計測対象物体21の形状を計測する方法であって、4つ以上の光源を順次点灯させて計測対象物体21に投影される1次元格子の位相をシフトさせながら計測対象物体21を撮影するステップと、撮影された画像に対して位相解析処理を施して、計測対象物体21の形状を求めるステップとを含み、4つ以上の光源は1次元格子を構成する直線に垂直な方向に等間隔に配置されており、格子投影用光源11を含み格子プレート12に平行な光源面からの距離は、1次元格子の位相シフト量または位相に依存することを特徴とする。
(もっと読む)
21 - 40 / 633
[ Back to top ]