
Fターム[2F065LL12]の内容
光学的手段による測長装置 (194,290) | 光学系 (17,149) | 完全反射体 (2,799) | 平面鏡(プリズム含む) (1,867)
Fターム[2F065LL12]の下位に属するFターム
回転又は振動 (344)
Fターム[2F065LL12]に分類される特許
21 - 40 / 1,523
形状測定装置
【課題】毛髪表面の断面形状(表面輪郭形状)、毛髪表面の段差を高精度に測定できる形状測定装置の実現。
【解決手段】測定すべき毛髪に向けて走査ビームを投射する対物レンズ13を含み、毛髪からの反射光を受光して毛髪表面の共焦点画像を撮像する共焦撮像装置と、複数の毛髪を、その長手軸線方向であるX軸方向に支持すると共にX軸と直交するY軸方向そって所定の間隔で整列支持する毛髪支持手段15と、X軸方向及びY軸方向に移動可能で、前記毛髪支持手段を支持するステージ14とその駆動手段と、対物レンズとステージとの間の相対距離を変化させる手段16と、共焦点撮像装置から出力される画像信号に基づき、毛髪表面の断面画像情報及び/又は毛髪表面に存在する段差の大きさを示す段差情報を出力する信号処理装置10とを有する。ステージは、測定される毛髪の本数及び測定点の座標情報に基づき、ジグザグ状に設定された移動経路に沿って移動する。
(もっと読む)
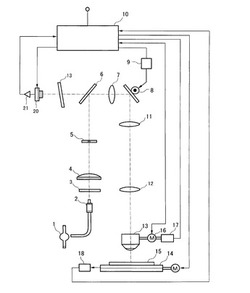
画像測定装置

【課題】簡単な構造で容易に対象エリア、又は測定対象の画像が取得できると共に対象エリアの測定が行える画像測定装置を提供する。
【解決手段】投光光軸26と照明光29を射出する光源27とを有し、前記投光光軸を経て前記照明光を投射する投光光学系5と、受光光軸15と撮像素子13とを有し、測定対象からの再帰反射光29′を前記受光光軸を経て撮像素子で受光する受光光学系6と、前記撮像素子で撮像されたデータを処理する制御演算装置7とを具備し、前記投光光学系は前記投光光軸を測定対象に向け前記照明光を投射する投光ユニット25と、該投光ユニットを高低方向、水平方向に回転し、前記照明光の投射角を変更する投射角変更手段23,33と、前記受光光軸に対する前記投光光軸の方向角を検出する方向検出手段24とを有する。
(もっと読む)
触針式測定装置
【課題】触針が測定点の直上に位置している状態において測定対象物の表面の測定点を実質的に真上から検知することを可能とする観察手段を備えた触針式測定装置を提供する。
【解決手段】触針式測定装置100において、長手軸線方向に延在する細長い触針110であって、測定対象物10の表面12の所定の測定点14に運ばれて同測定点14に接触するようにされる尖端部112を有する触針110と、該触針110の周囲の少なくとも一部に配置され、表面12の測定点14及び該測定点14の周囲からの光を受光する受光部130と、を備え、受光部130で受光した光に基づき、測定点14に対する尖端部112の位置決めを行う。
(もっと読む)
計測装置及び計測方法
【課題】参照面と被検面との間の距離の計測において、計測範囲の広範囲化の技術を提供する。
【解決手段】光源からの第1光を参照面に入射させ第2光を被検面に入射させる分割素子と、前記参照面で反射された前記第1光と前記被検面で反射された前記第2光との干渉光の位相をシフトさせる位相シフト部と、前記干渉光の強度を検出する検出部と、前記光源からの光の周波数を連続的に3つ以上の周波数に設定し前記3つ以上の周波数のそれぞれについて前記干渉光の位相をシフトさせながら前記干渉光の強度を検出するように前記検出部を制御し検出される前記干渉光の強度及び前記位相シフト部による前記干渉光の位相のシフト量に基づいて、前記参照面と前記被検面との間の光路長に相当する位相を特定し前記参照面と前記被検面との距離を求める処理部と前記処理部は前記3つ以上の周波数のそれぞれの間の周波数差が互いに異なるように前記3つ以上の周波数を設定する。
(もっと読む)
画像処理装置および画像処理プログラム
【課題】所望の計測部分の幾何的な物理量を選択的にかつ容易に取得することが可能な画像処理装置および画像処理プログラムを提供する。
【解決手段】対象物画像データに基づいて対象物画像OIが表示されるとともに、指定画像データに基づいて対象物画像の特定部分に対応する計測部分指定画像AIが表示される。使用者による操作部の操作により、表示される計測部分指定画像AIが対象物画像OIに相対的に移動される。計測部分指定画像AIが対象物画像OIの特定部分に移動された場合、その特定部分に対応するように予め設定された計測対象物の計測部分の物理量が計測される。
(もっと読む)
コヒーレンス走査干渉計及び物体の高さ形状を空間解像可能に光学的に測定するための方法
【課題】コヒーレンス走査干渉計及びこのコヒーレンス走査干渉計を用いた物体の高さ形状測定するための方法に対して、測定精度や測定特性の再現性に関する改良を行なうことである。
【解決手段】光源2と、干渉計と、経路長変更ユニットと、検出面を有するカメラ3とが備えられている。経路長変更ユニットは、測定ビームと基準ビームの光路長を変更するように構成されている。経路長変更ユニットは、経路目盛11と経路検出器12とを有しており、経路目盛11と経路検出器12とは、経路長変更ユニットによる測定ビームの光路長変更または基準ビームの光路長変更あるいはその両方の光路長変更の際に、経路検出器12の同期的な動きが経路目盛11に対して相対的に行なわれるように構成されている。
(もっと読む)
半導体ウェハの表面検査システム
【課題】より小型または簡単な構成で、より精度よく、半導体ウェハの表面に存在するソーマークの検出又は大きさの測定を行うことが可能な技術を提供する。
【解決手段】半導体ウェハWの表面に対して斜め方向から、入射面において平行光である光を照射し、ラインセンサカメラ3、4で半導体ウェハWの表面におけるライン状の領域3aを撮影する。このことで、半導体ウェハWの表面からの照射光の反射光または散乱光を検出し、この強度に基づいて、半導体ウェハWの表面における線状の凹凸を検出し、またはその大きさを測定する。光源装置1、2によって、ラインセンサカメラ3、4によって撮影されるライン状の領域3aのラインに平行な方向から光を照射し、線状の凹凸の方向がラインの方向に直交するように配置された状態で、半導体ウェハWの線状の凹凸を検出し、またはその大きさを測定する。
(もっと読む)
リソグラフィ装置及びデバイス製造方法
【課題】リソグラフィ装置における改良型測定システムを提供する。
【解決手段】リソグラフィ装置は、放射ビームの断面にパターンを付与してパターン付放射ビームを形成できるパターニングデバイスを支持する支持体と、基板を支持する基板テーブルと、パターン付放射ビームを基板のターゲット部分上に投影する投影システムと、測定システムであって、測定放射ビームを提供する測定放射システムと、リフレクタ間で測定ビームの一部分を反射する少なくとも2つのリフレクタと、リフレクタの1つを通して伝送される測定ビームの少なくとも一部分の波長を検出するディテクタとを備える測定システムと、を含む。
(もっと読む)
計測装置
【課題】簡易な構成で広い計測レンジと高い計測精度とを実現した計測装置を提供する。
【解決手段】計測装置は、第1光源、第2光源、第1検出器、第2検出器及び算出部を備える。第1光源は第1波長と第2波長との間で波長が走査された走査区間を含む第1光を生成する。第2光源は第3波長の第2光を生成する。第1検出器は第1光を参照面及び被検面に各々照射することで生成された第1干渉縞を検出する。第2検出器は第2光を参照面及び被検面に各々照射することで生成された第2干渉縞を検出する。第3波長は第1波長及び第2波長の合成波長より短い。算出部は第1時刻において第2干渉縞の位相のデータから第2干渉縞の次数が算出できなくなった場合に、第1時刻より後の走査区間における第1干渉縞の位相の変化に基づいて第1時刻以降における第2干渉縞の次数を算出し、該算出された第2干渉縞の次数を用いて第1時刻以降における被検面の形状を算出する。
(もっと読む)
状態検出装置
【課題】被測定対象物のレーザスペックル画像を得る装置において、被測定対象物の材質などに起因するスペックル画像の画質低下を可及的に抑制する。
【解決手段】被測定対象物(20)表面の観察領域(21)に向けてコヒーレント光を投光する投光部(10)と、被測定対象物表面の観察領域で拡散反射した上記コヒーレント光を受光する受光部(30)と、被測定対象物表面から受光部以外の方向に伝播するコヒーレント光を被測定対象物表面の観察領域に戻す反射部(41)と、受光部における受光状態に基づいて被測定対象物の状態を検出する検知部(50)と、を備える。
(もっと読む)
角度測定方法及び角度測定システム
【課題】回転角度を高精度且つ短時間で測定すること。
【解決手段】回転が一定範囲とされた支持基準体であるエンコーダ本体2aと、エンコーダ本体2aに対し全周回転自在に軸支された駆動する回転体である回転軸3とを有し、エンコーダ本体2aに対する回転軸3の相対的な回転角度を検出する相対的角度検出手段としてのロータリエンコーダ2と、エンコーダ本体2a及び回転軸3から切り離されて、エンコーダ本体2aの回転角度を光学式角度検出手段としての非接触角度検出手段20とを備える。これにより、ロータリエンコーダ2が検出した回転角度を、非接触角度検出手段20で検出した回転角度に基づいて補正することができ、回転角度を高精度且つ短時間で測定することが可能となる。
(もっと読む)
膜厚測定装置および膜厚測定方法
【課題】屈折率が未知の誘電体薄膜の膜厚を正確に測定することができる膜厚測定装置および膜厚測定方法を提供する。
【解決手段】膜厚測定装置は、第1の反射干渉光および第2の反射干渉光のそれぞれについて第1の波長分布および第2の波長分布を生成する波長分布生成部72と、第1の波長分布および第2の波長分布にもとづいて、それぞれ第1の入射角に対応する第1の光路差および第2の入射角に対応する第2の光路差を求める光路差算出部73と、入射角、膜厚および屈折率を変数とした関数として光路差を表した式を用いて、第1の入射角および第2の入射角ならびに光路差算出部73に算出された第1の光路差および第2の光路差を式に代入することにより、薄膜の膜厚および屈折率を求める膜厚屈折率算出部74と、を備える。
(もっと読む)
対象物識別方法と装置
【課題】対象物が太陽に直接照らされていても、対象物が遠くに位置していても、対象物を撮像して得た画像において、対象物の位置を識別できるようにする。
【解決手段】第1の波長域の光を吸収し、かつ、第2の波長域の光を反射する光学特性部3を、対象物1に取り付ける。第1の波長域の光を第1撮像部5aに入射させ、かつ、第2の波長域の光を、第1撮像部以外の位置へ反らし、または、吸収する第1光学系6と、第2の波長域の光を第2撮像部5bに入射させる第2光学系8と、を用意する。第1撮像部5aにより、第1光学系6を介して、対象物1を含む領域を撮像して第1画像を生成するとともに、第2撮像部5bにより、第2光学系8を介して、対象物1を含む領域を撮像して第2画像を生成する。第1画像の各画素の輝度Aと、対応する第2画像の画素の輝度Bとの比率B/Aを求め、この比率に基づいて、光学特性部3の位置を特定する。
(もっと読む)
撮像装置、位置計測装置及び撮像方法、位置計測方法、並びに構造物の製造方法
【課題】CCDやCMOSセンサなどの撮像素子を用いた薄型の撮像装置が多く用いられており、位置計測対象を複数の撮像装置で撮像して所定の画像処理を施すことにより、位置計測対象の位置を計測している。この時、視野を広くしても、分解能の低下を抑制できる撮像装置、位置計測装置及び撮像方法並びに位置計測方法を提供する。
【解決手段】視野V1〜V3の像を撮像する撮像素子2を備える。複数の視野の像を重ねて撮像素子に撮像可能とする像重ね部3を備える。前記像重ね部は、入射した光の少なくとも一部を前記撮像素子に入射させるビームスプリッターを有する。
(もっと読む)
可動式ホーム柵監視用カメラ装置
【課題】都市部の駅ホームや、地下鉄の駅ホームでは、駅ホームのスペースが狭く、列車の乗降口または可動式ホーム柵の開閉部を広範囲にするための監視用カメラ装置のカメラ部の設置スペースを十分に確保できない。
【解決手段】本発明の可動式ホーム柵監視用カメラ装置は、可動式ホーム柵と、反射鏡と、前記可動式ホーム柵内に設置し前記反射鏡を介して前記可動式ホーム柵を撮像するカメラ部と、前記カメラ部が撮像した画像から乗客を検出する画像処理部と、モニタとを備え、前記画像処理部は、前記カメラ部が撮像した画像から前記可動式ホーム柵の開閉部およびその周辺を切り出して合成した合成画像を作成し、前記モニタは、前記合成画像を表示する。
(もっと読む)
プロキシミティ露光装置、プロキシミティ露光装置の基板位置決め方法、及び表示用パネル基板の製造方法
【課題】安価な構成で、チャックのθ方向の傾きを精度良く検出して、基板のθ方向の位置決めを精度良く行う。
【解決手段】第1のステージに搭載されY方向(又はX方向)へ移動する第2のステージに第2の反射手段(35)を取り付け、第2の反射手段(35)のθ方向の位置ずれを検出する。チャック(10a,10b)に複数の光学式変位計(41)を設け、複数の光学式変位計(41)により、第2のステージに取り付けた第2の反射手段(35)までの距離を複数箇所で測定する。第2の反射手段のθ方向の位置ずれの検出結果に基づき、複数の光学式変位計(41)の測定結果から、チャック(10a,10b)のθ方向の傾きを検出し、検出結果に基づき、第3のステージによりチャック(10a,10b)をθ方向へ回転して、基板(1)のθ方向の位置決めを行う。
(もっと読む)
計測装置
【課題】簡易な構成で参照面と被検面との間の絶対距離を高精度かつ高速に計測可能な計測装置を提供すること
【解決手段】波長走査干渉計は、複数の光源IL1〜IL3と、複数の光束を合成するビームスプリッタ103bと、ビームスプリッタ103bからの光を参照光束と被検光束に分割し、干渉計ユニット300によって検出された干渉信号に基づいて参照面と被検面との間の絶対距離を決定する処理部107と、を有する。干渉計ユニットは、複数の種類の光束に対応する複数の種類の干渉縞のそれぞれを、合成された干渉信号S100として検出する単一の光検出部106を有し、処理部は、合成された干渉信号に対してFFTを行って複数の種類の光束のそれぞれについて絶対距離L1〜L3を取得し、取得した複数の絶対距離を演算して一つの絶対距離L4を出力する。
(もっと読む)
移動体駆動方法及び移動体駆動システム、パターン形成方法及び装置、露光方法及び装置、並びにデバイス製造方法
【課題】複数のZヘッドを切り換えながら、移動体の高さと傾斜を継続的に計測することにより、移動体を高精度で駆動する。
【解決手段】制御装置は、テーブルWTBの±X端部に設置された反射面39Y1,39Y2上に位置する2つのZヘッドZsR,ZsLを用いて、テーブルWTBの高さと傾斜を計測する。テーブルWTBのXY位置に従って、使用するZヘッドをZsR,ZsLからZsR’,ZsL(あるいはZsR,ZsL’)に切り換える。制御装置は、切り換えの際、座標つなぎ法を適用して、新たに使用するZヘッドZsR’(あるいはZsL’)の初期値を設定する。これにより、テーブルのXY位置に応じて使用するZヘッドが逐次切り換えられるにもかかわらず、切り換えの前後でテーブルの高さと傾斜の計測結果が保存され、テーブルを高精度で駆動することが可能になる。
(もっと読む)
プロキシミティ露光装置、プロキシミティ露光装置の基板位置決め方法、及び表示用パネル基板の製造方法
【課題】経年変化に伴ってレーザー測長系のレーザー光源の出力特性が変化しても、移動ステージの位置を精度良く検出して、基板の位置決めを精度良く行う。
【解決手段】移動ステージに複数の反射手段34a,34b,35を取り付け、複数のレーザー干渉計32a,32b,33により、レーザー光源31a,31bからのレーザー光と各反射手段34a,34b,35により反射されたレーザー光との干渉を複数箇所で測定する。各レーザー干渉計32a,32b,33の測定結果から、移動ステージの位置を検出し、検出結果に基づき、移動ステージによりチャック10a,10bを移動して、基板1の位置決めを行う。各レーザー干渉計32a,32b,33が受光したレーザー光の強度の変化を検出し、検出したレーザー光の強度の変化を補う様に、レーザー光源31a,31bへ供給する駆動電流を制御する。
(もっと読む)
足背高測定法及びその測定法を使用した足型測定器
【課題】足型測定器において、撮像手段により足の側方を撮影する場合、撮像手段と足の距離を正確に測定できないことから足背部の高さの正確な測定ができないという不都合を解決し、足背高の正確な測定を含む足型測定器を提供すること。
【解決手段】足型測定器の撮像手段で取得した足裏画像において、第2足指の先端と踵の最後端を結ぶ線上の各点と撮像手段の光学的中心との距離を測ることにより、撮像手段と足との間の距離を特定できる。撮像装置と種々の距離での既知高の物体の画素単位での測定値と物体の実寸法との関係から変換式を事前に求めておくことにより、足の側方画像から求めた画素単位での足背高を実寸法に変換することができる。この手法により、足背高の測定を含む足型測定器を提供する。
(もっと読む)
21 - 40 / 1,523
[ Back to top ]