
Fターム[3C007FS01]の内容
マニピュレータ、ロボット (46,145) | 吸着装置単体の形態 (580) | 真空吸着 (505)
Fターム[3C007FS01]の下位に属するFターム
真空源を有さないもの (9)
エゼクタ (13)
ベルヌイチャック (77)
Fターム[3C007FS01]に分類される特許
101 - 120 / 406
真空吸着パッド
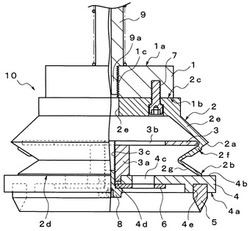
【課題】板状のワークを搬送する際に、その吸着面に凹凸があった場合でも、その凹凸を吸収し、かつワークの湾曲または偏角にも対応して吸着することのできる真空パッドを提供する。
【解決手段】蛇腹状のスカート部2の一端部2cに、このスカート部2内を真空にする真空装置からのパイプ9が接続された基部1が気密的に設けられ、蛇腹状のスカート部2内の大径部2aに、少なくとも一つ以上の貫通穴3bが形成された円板状の固定板3が設けられ、蛇腹状のスカート部2の大径部2aからなる他端部2dに、他端部2dと当接するとともに、少なくとも一つ以上の貫通穴4cが形成された軟質ゴムよりなる円板状のエッジホルダ4が設けられ、エッジホルダ4と固定板3とが一体的に形成されるとともに、エッジホルダ4の外装面4aには、エッジホルダ4よりも軟らかい軟質ゴムより形成されて平面上のワークの板面に当接する環状のエッジ部5が気密的に設けられている。
(もっと読む)
電子部品吸着装置、電子部品装着装置、及び、電子部品吸着方法

【課題】吸着口から吸入されるフラックスの量を十分に低減しながら、電子部品を揺動させることなく保持することが可能な電子部品吸着装置を提供すること。
【解決手段】この電子部品吸着装置100は、電子部品EDと接触し且つ当該電子部品よりも面積が大きい平面である接触面113aを有する。接触面には、吸着口116及び通気口117が形成される。更に、電子部品吸着装置は、吸着口から気体を流入させる吸入装置121を備える。加えて、電子部品吸着装置は、通気口から気体を流入又は流出させる気流生成装置122を備える。電子部品吸着装置は、吸入装置によって吸着口から気体を流入させることにより電子部品を接触面に吸着させる。これによれば、吸着口から吸入されるフラックスの量を十分に低減しながら、電子部品を揺動させることなく保持することができる。
(もっと読む)
ワークピックアップ装置及び方法
【課題】把持手段をワークに適切に吸着させることができるワークピックアップ装置を提供すること。
【解決手段】ワークピックアップ装置1は、サーボシリンダ11を待機位置から下降させる下降手段21と、バキュームカップ13がブランク15を押圧する力に対応する物理量を検出する検出手段22と、検出した物理量と基準となる物理量とを比較する比較手段23と、比較結果に基づき、サーボシリンダ11を下降させるか停止させるかを制御する停止制御手段と、を含む。
(もっと読む)
吸着搬送部材およびこれを用いた基板搬送装置
【課題】 基板を吸着して搬送する際に基板にパーティクルが付着しにくい吸着搬送部材およびこれを用いた基板搬送装置ならびにこの基板搬送装置を用いた基板処理装置および基板検査装置を提供する。
【解決手段】 先端側が二股に分岐した、支持部側から先端側に向けて長い板状体7に、板状体7の先端部の各表面の少なくとも2カ所に設けられた、気体を吸引して基板を吸着するための吸着部3と、分岐部を通って先端部の吸着部3同士をつなぐ先端側吸引路4aと、支持部に設けられた、分岐部における先端側吸引路4aに支持部側吸引路4bを介してつながって気体を吸引するための吸引部5とを備え、先端側吸引路4aが、先端部側で直線状であり、分岐部側で湾曲している吸着搬送部材1において、先端側吸引路4aの板状体7の長手方向における長さは、湾曲している部分の方が直線状の部分よりも長い吸着搬送部材1である。
(もっと読む)
ゴム栓吸着送り装置
【課題】ゴム栓をノズル内に確実に保持し、ノズルで吸引しつつ受け台から確実に引き上げ、ノズルから受け台に確実に受け渡すようにする。
【解決手段】小径部6と大径部5と中心の孔部7を有するゴム栓4の小径部を吸着させるゴム栓吸引ノズル2と、ゴム栓吸引ノズルでゴム栓の大径部を受け取る又は受け渡すゴム栓受け台3,3’を備えるゴム栓吸着送り装置1で、ゴム栓吸引ノズルが、小径部を収容する有底で円形の収容穴9と、収容穴の周りに配設され、大径部における小径部に続く端面5aに対向して開口し、開口8aを収容穴内に連通させた複数の小孔8と、複数の小孔の他端側の開口8bを連通させた吸引孔13とを備える。ゴム栓受け台が、大径部を収容する円形の受け溝16と、受け溝と該ゴム栓の該孔部7と外部とに連通して設けられたエア抜き孔17とを備える。
(もっと読む)
搬送ロボット
【課題】高価な力センサや複雑な信号処理を不要にしつつ、吸着部材を適切な力で対象物に確実に押し付けた状態で対象物を吸着把持できる搬送ロボットを提供する。
【解決手段】
支持体5が取り付けられ、支持体を移動させるように動作する動作機構7と、吸着部材3を対象物に押し付けるために、吸着部材と支持体のうち吸着部材を移動方向前方側にして、吸着部材を対象物に向けて移動させる押付移動を動作機構に行わせる動作制御部11と、押付移動により吸着部材が対象物に押し付けられることで、吸着部材が弾性的に支持体側へ押し戻された量が所定量に達したかを検知する押付検知部9とを備える。押付検知部が、吸着部材の押し戻された量が所定量となったことを検知した時に、動作制御部は、押付移動を停止させる。
(もっと読む)
ロボットハンドの歪み検出方法および自動交換システム
【課題】 ロボットハンドの歪みの有無を検出する安価なロボットハンドの歪み検出方法の提供と設定値以上の歪みを検出した時には予備のロボットハンドに自動交換するロボットハンドの自動交換システムの提供。
【解決手段】 材料をXY平面に平行に保持する材料保持手段を備えたロボットハンド13をロボット11に着脱交換自在に設け、定盤1表面にローカル座標(x,y,z)を設定し、前記ロボットハンドに4個の距離測定センサを設け、加工前に前記ローカル座標による歪み測定用プログラムによりロボットハンドを定盤上に位置決めし、前記4個の距離測定センサにより定盤表面との距離を測定し、この距離測定センサのそれぞれの測定値と、移動位置における定盤の表面との間の距離とを比較して平行度を求めてロボットハンドの歪みを求め、歪みが設定値以上の場合には予備のロボットハンドに自動交換することを特徴とするロボットハンドの自動交換システム。
(もっと読む)
ロボットハンド
【課題】ワークの横ズレや傾きによる位置ズレの発生がなく、確実にワークを保持、固定でき、また多種多様な形状、大きさのワークに対応でき、さらにワークの保持位置の自由度が高く、汎用性に優れたロボットハンドを提供する
【解決手段】ロボットアームの先端に取り付けられ、ワーク6を保持するためのロボットハンド1であって、ワーク面の形状に追従可能なベローズ式吸着パッド2と、ベローズ式吸着パッドの内側に配置され、ベローズ式吸着パッドとともにワークを保持、固定するための高硬度吸着パッド3と、ベローズ式吸着パッドの外側に配置され、ワークの傾きを固定するための固定ロッド4とからなる。固定ロッドはシャフト4aとシャフトの先端に取り付けられたワーク押さえ部4bとからなり、固定ロッドの先端に位置決めピン7が取り付けられていてもよい。
(もっと読む)
ロック機能付き把持装置
【課題】小型化および軽量化でき、把持部材を密に配置できるようにするロック機能付き把持装置を提供する。
【解決手段】把持装置10のロック機構7は、進退方向と交差するスライド方向にスライド可能な第1および第2のスライド体17,19と、第1および第2のスライド体を互いに逆方向にスライドさせる駆動装置21と、を備える。駆動装置21は、第1および第2のスライド体をそれぞれ互いに逆向きの第1および第2のスライド方向に移動させることで、複数の把持部材3に対し第1のスライド方向に第1のスライド体を押し付け、複数の把持部材に対し第1のスライド方向と逆向きの第2のスライド方向に第2のスライド体を押し付け、これにより、複数の把持部材を同時にロックする。
(もっと読む)
異なる高さに置かれたシート状部品の自動取出据付装置
【課題】異なる高さに積層されているシート状部品を、吸着して取り出し、ワークテーブルに搬送してセットする自動装置を提供する。
【解決手段】吸着体ホルダーの先端に吸着体2を設ける。この吸着体と該ホルダーのセンターに配置して、コイルバネを設けた可動ピンを、吸着体ホルダーに貫通させて装着する。さらに、この該ホルダーを保持体5に挿入して設ける。次に、保持体の内部の適当なる位置に、近接センサーを設ける。また保持体の側面よりホースニップルを取付けて、吸着体ホルダーに繋止して設ける。さらにホースニップルに、ソレノイドバルブへ接続された、エアチューブを装着する。最後に、搬送ロボットアーム10に設けられた、ホールド基体11に、保持体を装着する。
(もっと読む)
電子部品の装着ヘッド、吸着ノズル及び電子部品装着装置並びにエアフィルタ挿入治具
【課題】0.2mm×0.4mmや0.3mm×0.6サイズの小さな部品でもエアフィルタを有する、あるいは、エアフィルタの設置部分の構造が簡単並びに安価である吸着ノズル部を有する電子部品の装着ヘッドを提供し、それを用いることによって信頼性の高い電子部品装着装置を提供することにある。また、エアフィルタを挿入するための適切な治具を提供し、それを用いることによって稼働率の高い電子部品装着装置を提供することにある。
【解決手段】内部に第1の吸引通路を形成した吸着ノズル本体と、前記吸着ノズル本体の下端部に着脱自在に装着され前記第1の吸引通路に連通する第2の吸引通路を形成した吸着ノズルとを有する吸着ノズル部を備えた電子部品の装着ヘッドを具備し、前記吸着ノズル部は、前記吸引通路を遮断するエアフィルタを前記吸着ノズル部の側部から挿入する挿入部を設けたことを特徴とする。
(もっと読む)
基板移載装置
【課題】本発明は、基板の高速移送時に生じる風によって、基板表面に塗布された塗膜に発生する塗膜の変形、波打ち等の塗膜欠陥や、さらには塗膜表面への異物付着を低減する手段を備えた基板移載装置を提供することを課題とするものである。
【解決手段】基板を積載保持するハンド部を有する基板移載装置であって、ハンド部に積載した基板を上から覆う風拡散板を有し、該風拡散板は一端部がハンド部の付け根部分に固定されていることを特徴とする基板移載装置。
(もっと読む)
吸着固定用シートおよびその製造方法
【課題】吸引ユニットによる吸引力を搬送すべき物品の吸着のためにより確実に適用できる吸着固定用シートを提供する。
【解決手段】一方の主面11が吸引ユニットから吸引作用を受ける吸引面11であり、もう一方の主面12が吸着されるべき物品に向けて配置される作業面12である多孔質膜10からなる吸着固定用シート100として、多孔質膜10の端部15の少なくとも一部において多孔質膜10の空孔に樹脂30が充填され、吸引ユニットから吸引作用を受けたときに、樹脂30によって多孔質膜10の側面13から吸引面11への空気抜けを抑制する。多孔質膜10は超高分子量ポリエチレン(UHMWPE)粉体の焼結体によって構成することが好ましい。
(もっと読む)
保持用治具およびこれを備えた吸着装置
【課題】 半導体ウエハなどの被保持体の絶縁破壊を抑制し、かつパーティクルの付着を特に抑制できる保持用治具および吸着装置を提供すること。
【解決手段】 半導電性を有するセラミックスからなる支持体16に吸気路2を形成した保持用治具20であって、吸気路2の表面4は支持体16における他の表面6より表面抵抗値が小さい領域を有している保持用治具20とする。また、この保持用治具20を備え、この保持用治具20の吸気路2の吸気により、支持体16の外表面6に対して表面抵抗値が小さい被保持体を吸着可能とした吸着装置とする。
(もっと読む)
ハンドリング装置および電子部品検査システム
【課題】安定かつ高速に電子部品を渡すことができるハンドリング装置および電子部品検査システムを提供する。
【解決手段】昇降装置23は、電子部品を吸着した吸着部215を搬送位置から受け渡し位置に移動させる際、搬送位置からこの搬送位置と受け渡し位置との間の切り替え位置で押圧部235を減速する。これにより、電子部品を渡す直前には切り替え位置よりも低速で電子部品を移動させて受け渡し位置での衝撃を軽減するので、電子部品が破損するのを防ぐことができる。また、電子部品の移動に要する時間を所定の値にできるとともに、切り替え位置までは高速で電子部品を移動させることにより移動に要する時間を短縮することができる。結果として、より安定かつ高速に電子部品を渡すことができる。
(もっと読む)
ロボットハンド用の被着装置
【課題】小さい物や紙などの薄い物を容易に掴むことのできるロボットハンドを提供すること。
【解決手段】関節機構によって指の曲げ伸ばしが可能なロボットハンドの骨格部に被着し、指または全体で物を把持するロボットハンド用の被着装置において、指部分に吸引口11〜14を有し、ロボットハンドの骨格部に着脱可能な柔軟素材からなる被着部材と、被着部材に埋め込まれ、一端が吸引口に接続されるチューブ15〜18と、チューブの他端に接続され、吸引口からの吸引によって物を吸いつける吸引ポンプ21〜24とを備える。
(もっと読む)
バキューム式吸着装置およびロボットハンド
【課題】相手側部材の傾斜した部位を吸着しなければならない場合であっても、バキュームカップのめくれ現象による吸着ミスを防止する。
【解決手段】シリンダチューブ8と、ピストン9と、負圧通路13が形成されたピストンロッド10と、バキュームカップ11のほか、シリンダチューブ8の内周の連通路14を備えている。ピストン9が連通路14に合致していない(A)の状態で負圧通路13を通して負圧を導入する。これによりピストン9側を固定側としてシリンダチューブ8とともにバキュームカップ11をストロークSだけストロークさせて、(B)のようにワークWに押し付ける。そして、ピストン9が連通路14に合致することで負圧吸引力でワークを吸着支持する。
(もっと読む)
ICハンドラ
【課題】大きさの異なる電子部品に、より対応することが可能なICハンドラを提供する。
【解決手段】このICハンドラ1は、電子部品を吸着する吸着ノズル868と、水平面内のX方向およびY方向に各々独立して移動することが可能な8つの移動ユニット89とを備え、各々の移動ユニット89毎に1つの吸着ノズル868を装着可能で、かつ、少なくとも2つの移動ユニット89に対して1つの吸着ノズル868を装着可能なように構成されている。
(もっと読む)
吸着ハンド及びこれを用いたウェーハ搬送装置
【課題】大型のウェーハの裏面を真空吸着して保持する吸着ハンドにおいて、ウェーハの自重による変形および真空吸着力による局所的な変形を抑制する。
【解決手段】ウェーハを吸着するための吸着部を有し、この吸着部と前記ウェーハの裏面との間に減圧部を生じさせることにより前記ウェーハを吸着して保持する吸着ハンドであって、前記吸着部を3か所以上設け、これらの吸着部の中心を頂点とする多角形の内側に前記ウェーハの中心が位置し、且つ前記吸着部が前記ウェーハの外周の内側に位置するように前記ウェーハを保持する。
(もっと読む)
基板搬送装置、基板検査装置、及び、基板搬送方法
【課題】基板搬送装置、基板検査装置及び基板搬送方法において、基板との不要な接触を防ぐ。
【解決手段】ウエハ搬送装置1は、ウエハWが載置されるウエハ載置面2a,3aを有し互いに平行に設置された2本のアーム部2,3と、ウエハ載置面2a,3a(アーム部2,3)をアーム部2,3の長手方向を回動軸A2,A3として水平面に対し傾斜させる傾斜手段としてのバランサ(錘)4,5と、アーム支持部6と、吸引用チューブとしてのアーム側吸引用チューブ7,8と、支持部側吸引用チューブ9と、傾き検出手段としての透過型センサ10,11と、を備える。
(もっと読む)
101 - 120 / 406
[ Back to top ]