
Fターム[3C007FS01]の内容
マニピュレータ、ロボット (46,145) | 吸着装置単体の形態 (580) | 真空吸着 (505)
Fターム[3C007FS01]の下位に属するFターム
真空源を有さないもの (9)
エゼクタ (13)
ベルヌイチャック (77)
Fターム[3C007FS01]に分類される特許
61 - 80 / 406
ロボットシステム及び物品加工方法並びに工業製品の製造方法
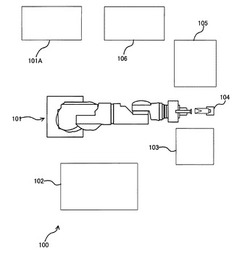
【課題】より少ないコストでロボットを用いた加工作業を行なうことができるようにした、ロボットシステム及び工業製品の製造方法を提供する。
【解決手段】付着材が付着した対象物を保持する保持機構18を装着したマニピュレータ101と、マニピュレータ101の動作を制御するコントローラ101Aと、マニピュレータの近傍に配設され対象物の付着材を保持する付着材剥離ユニット104と、を有し、コントローラ101Aは、保持機構18により保持された対象物の付着材を付着材剥離ユニット104に所定の進入角度で進入させて対象物と付着材とを剥離させる。
(もっと読む)
板ガラス吸着装置

【課題】交互に挟まれた状態にある板ガラスと合紙を同時に取り出す際に、安定して両者を吸着保持でき、また、ガラス板からはみ出ている合紙端部の折れ曲がりや癖付き等に対しても確実に吸着保持できる吸着装置を提供すること。
【解決手段】板ガラスGの一方の平面側を吸着するガラス吸着パッド11と、ガラス吸着パッド11が板ガラスGを吸着する際、板ガラスGの他方の平面側に位置する合紙Pの板ガラスGの周辺からはみ出た合紙端部を、板ガラスGの一方の平面側から、板ガラスGの辺に沿って長手方向に配置され合紙端部に線状に接触する吸着開口部12aにより吸着する合紙吸着治具12とを有する。
(もっと読む)
真空チャック
【課題】真空チャックに求められる吸着力で、吸着面の一部に載置される被吸着物を確実に吸着する真空チャックを提供する。
【解決手段】大気圧をP1、真空チャック1に求められる最小吸着力をFminとし、到達圧力がPu、排気効率がSeの真空ポンプ5で背面側が吸引される吸着パッド2が、吸着パッドの単位表面積と該単位表面積内に露出する貫通孔の総開口面積との比である開口率nと、多数の貫通孔による吸着パッド全体のコンダクタンスCが、
を満たす。(1)式を満たす真空チャック1は、被吸着物に覆われない吸着パッド2の一部から空気漏れがあっても、Fmin以上の吸着力で被吸着物を確実に吸着保持する。
(もっと読む)
凹凸著しい面にも吸着する真空吸着パッドと真空開閉弁
【課題】凹凸著しい面で汎用的に簡単に利用できる真空吸着パッドを提供すること。
【解決手段】開閉弁筒体の内側に密着され略中央に真空連通孔を穿設した薄膜構造の弁膜と、前記筒体の開口部に断面凹状の弾性体の筒体が密着され、該弾性体筒体内側底面には前記薄膜の真空連通孔に当接する弾性体台状平滑突部の弁座を設け、また前記弾性筒体の伸張により底部を移動させるための可動板と、前記弾性体筒体内側と真空生成装置とを連通する継ぎ手とが弾性筒体の底面部に設けられ形成された伸縮真空制御室と、前記可動板を弾性体筒体長手方向に、前記弁膜とは逆方向に動かすために可動板に接し設けられた接面検知作動杆とからなり、真空吸着パッドが対象物を吸着する場合の3つの状態遷移に対応した真空開閉弁付き真空吸着パッドとした。
(もっと読む)
電子部品把持装置及び電子部品検査装置
【課題】電子部品を載置するトレイなどの高さを適宜自動的に測定することのできる電子部品把持装置及び電子部品検査装置を提供する。
【解決手段】供給側ロボットハンドユニット20は、電荷を拡散させる材料からなるトレイに載置されたICチップを把持部32を当接させて把持する当接装置20Aと、当接装置20Aをトレイに対して上下方向に駆動制御する制御手段とを備える。把持部32は当接装置20Aにて独立した導電性を有するとともに、電荷の拡散に基づいて電荷を拡散させる部材との当接を検出する当接検出装置40が接続され、制御手段は、電荷を付与された把持部32をトレイに下降させ、把持部32のトレイへの当接を検出したとき、把持部32の上下方向の位置を測定する。
(もっと読む)
合紙除去装置
【課題】合紙とガラス基板等の板状体を交互に積層してなる積層体を開梱する場合において、周辺環境による合紙折れ曲がり面の状態変化によっても、合紙の吸着不良を発生させずに、合紙除去可能な合紙除去装置を提供する。
【解決手段】合紙と基板が交互に積載され、前記合紙がガラス基板よりも大きく、少なくとも1辺に前記合紙吸着部を有した積層体から、前記合紙と前記基板を1枚ずつ交互に取り出す開梱装置を構成する、前記積層体から前記合紙を複数の吸着パットで真空吸着して取り出す合紙取出ロボットを有する合紙除去装置において、前記合紙の吸着面に対して基板に向かって縦に、少なくとも2個以上の吸着パットを複数列備える合紙取出ロボットを有する。また、複数の前記吸着パットが、個々の真空配管に電磁弁と圧力計とを有しており、予め定められた吸着圧に達しない前記吸着パットの個々の真空引きを停止する機能を有する。
(もっと読む)
部品吸着ヘッド
【課題】 小型化及び小径化を図ることによって高密度での配設を可能とし、しかも十分な吸着力を発揮することが可能な部品吸着ヘッドを提供する。
【解決手段】 先端に吸着ノズルを有すると共に当該吸着ノズルに連通する吸気通路を有する搬送シャフトと、この搬送シャフトが貫通すると共に当該搬送シャフトを周方向へは回転不能に且つ軸方向へは移動自在に保持すると共に、前記搬送シャフトの吸気通路に連通する吸引孔が設けられた円筒状ハウジングとを備え、前記ハウジングは吸着ノズル側の軸方向端部に回転軸受の装着部となる回転軸部を有し、この回転軸部の吸着ノズル側の先端にはキャップ部材が装着され、このキャップ部材には前記搬送シャフトの外周面に摺接するシール部材が内蔵されている。
(もっと読む)
アンパッカー装置
【課題】アンパッカー装置による素ガラス投入において、合紙が外れることを防いで動作異常のないアンパッカー装置を提供する。
【解決手段】素ガラス基板と合紙が交互に積み重ねられたデンスパックから素ガラス基板を取り出すアンパッカー装置であって、素ガラス基板を真空吸着する素ガラス基板吸着手段と、合紙を真空吸着する合紙吸着手段と、ガラス基板吸着手段を駆動する駆動手段Aと、合紙吸着手段を駆動する駆動手段Bと、駆動手段Aと駆動手段Bを制御する制御手段と、を備え、更に、合紙吸着手段には、ミストを噴射するミスト噴射ノズルと、合紙を押し当てる加熱された金属バーと、を備えたことを特徴とするアンパッカー装置。
(もっと読む)
基板吸着ユニットおよび基板吸着アセンブリ
【課題】本発明は、複数の基板を吸着するための基板吸着ユニットおよび基板吸着アセンブリに関する。
【解決手段】本発明は、複数の基板を吸着するための基板吸着ユニットおよび基板吸着アセンブリを提供し、基板吸着アセンブリは、固定フレームと、複数の基板吸着ユニットとを含む。各基板吸着ユニットは、各基板に対応して間隔をおいて固定フレーム上に固設され、各基板吸着ユニットは、真空装置に空圧的に接続し、本体と吸着部とを含む。本体は、真空装置に空圧的に接続し、吸着部は、本体の末端に対称的に設けられ、本体を介して真空装置に空圧的に接続し、基板のいずれかを均一に吸着するために用いられる複数の吸着部材を有する。
(もっと読む)
吸着装置
【課題】本発明は、低気圧源に接続し、基板の吸着に用いる吸着装置に関する。
【解決手段】吸着装置は、吸着本体と、気圧制御装置とを含む。吸着本体は、分布範囲を有し基板に接触する平面と、複数の孔とを含む。これらの孔は、平面上に形成され、実質的に平面の分布範囲内に均等に分布する。気圧制御装置は、制御により、低気圧源とこれらの孔とを空圧的に接続する。基板が平面に接触し、かつ気圧制御装置がこれらの孔と低気圧源とを空圧的に接続すると、基板と吸着本体とは相互に固着する。
(もっと読む)
吸着パッドのコア部材
【課題】コア部材の体積を小さくすることにより熱容量を小さくして放熱性を向上させることが可能な吸着パッドのコア部材を提供する。
【解決手段】コア部材12は、ワーク100に当接する吸着面を有し、前記吸着面側から前記吸着面と対向する装着面側へ向けて吸引路15が設けられるようにした。この吸引路は、前記装着面側においては、開口して流体吸引口16を形成し、また、この吸引路は、前記吸着面側においては、底部を貫通して前記吸着面に開口する吸引孔によって外部と連通しており、前記流体吸引口を介して前記吸引孔から流体が通過するようにした。更に、前記吸引路の内周面は、前記流体吸引口側へ行くに従って徐々に拡径する拡径部19を有するようにした。
(もっと読む)
チャック及びロボットハンド
【課題】比較的簡素で、且つ軽量な構造で多様なワークの保持等に対応できるロボットハンド及びチャックの提供すること。
【解決手段】チャックホルダ1、操作ロッド2、及びチャック爪3からなり、チャックホルダ1は、ワークの保持開放機能を満足すべくチャック爪3が揺動自在に収まる切り込み7と、チャック爪3の基部3b背面を支持する揺動支点を備え、操作ロッド2は、その先端部に側方へ突出した加圧部8を備え、チャックホルダ1の中空部に、操作ロッド2を進退可能に挿通し、操作ロッドの加圧部8とチャックホルダ1の揺動支点で、複数のチャック爪3の基部3bを挟持し、各チャック爪3の基部3bの内面に、操作ロッド2の進退に伴う加圧部8の進退量を、各チャック爪3の遠心及び向心方向への揺動量に変換するカム部9を備えるチャック。
(もっと読む)
ロボットシステム
【課題】 搬送手段より移動している上向き凸部を持つ部品と、厚み方向貫通孔を持つ部品との嵌合を確実に行うロボットシステムを提供すること。
【解決手段】 厚み方向貫通孔38を有する上記ワークAを把持する把持手段10と、上記把持手段10を運行させる移動手段12と、上記ワークAの厚み方向貫通孔38と嵌合する上向き凸部36を持つワークBを移動させる搬送手段20と、上記ワークBの移動と上記把持手段10の移動を同速度同方向で並走させる同期制御部14と、上記ワークBの上向き凸部36を撮影する撮像部26と、上記撮像部が撮影した画像から上記ワークAの厚み方向貫通孔38と上記ワークBの上向き凸部36が嵌合する際に必要となる上記ワークBの上向き凸部36の中心座標40を求める画像処理部22と、を備える。
(もっと読む)
基板搬送アーム
【課題】基板を吸着パッドにより下側に保持して搬送し、基板を真空吸着して保持するワークステージ上に載置するための基板搬送アームにおいて、搬送アームの移動中に基板が吸着パッドから外れたとしても、簡便な手段により落下することを防止する。
【解決手段】複数の吸着パッド1を備え、基板を真空吸着し下側に保持して搬送する基板搬送アーム10において、回転軸部により回転可能に取り付けられた腕部と、該腕部に取り付けられ該周縁の吸着パッド1の下側に突出する捕手部と、該腕部の先端に位置する滑走部からなる、一対の落下防止具20、20が、前記複数の吸着パッド1のうち、周縁に位置する吸着パッド1の一部に隣接して配置されていることを特徴とする。
(もっと読む)
ノズル吸引式の対象物の搬送装置、搬送方法及びこれらに用いられるプログラム
【課題】磁気ヘッドのスライダチップなどの微小部品のノズル吸引式による搬送装置において、従来の装置構成に変更を加えることなく、自動的に、ノズル吸着位置のずれによる影響を最小限に抑えて搬送不良を防止することができる搬送装置及び搬送方法を提供する。
【解決手段】ノズル吸着位置がずれた場合であっても、ノズルを回転させてノズル吸着位置のずれの影響が最小限となるノズル回転位置を撮像画像から検出し、その回転位置にて搬送を行うことにより、ノズル吸着位置のずれに対する調整を自動的に行うことができる。
(もっと読む)
吸着台および球状体搭載装置
【課題】吸着対象体を確実に保持する機能を維持しつつコストの低減を実現し得る吸着台を提供する。
【解決手段】上面81a側に吸気口81hが形成された板状の基体部81と、通気性を有して吸気口81hを覆うように基体部81の上面81a側に配置されるシート体82と、厚み方向に貫通する複数の通気孔83cが形成されると共に一面83aが基体部81の上面81aに対向するようにシート体82を挟んで上面81a側に配置される吸着板83とを備え、吸着板83を上面81a側に配置した状態においてシート体82を介して吸気口81hと通気孔83cとが連通し、吸気口81hから吸気して吸着板83の他面83bに載置された基板400を吸着して保持する。
(もっと読む)
パラレルロボット用ワークピッチ可変装置
【課題】 パラレルロボットにより処理されるワークのピッチを可変にするためのワークピッチ可変装置を提供する。
【解決手段】 各々の下端が連結部3に連結された複数のパラレルリンク対14、15、16によりワークWに対して処理を行うパラレルロボット1において、処理すべきワークWのピッチを可変にするためのワークピッチ可変装置4を構築する。この場合に、上下方向に延びる回転可能な回転軸40と、回転軸40の下端に連結され、水平方向に延びるレバーアーム41と、レバーアーム41の下方において水平面内の一方向に移動自在に設けられ、ワークWを吸着保持するための複数の吸着パッド50、51、60、61、70、71、80、81と、各吸着パッドとレバーアーム41との間をそれぞれ連結する複数の連結バー47A、48A、47B、48Bとを設ける。
(もっと読む)
真空吸着パッド、搬送アーム及び基板搬送装置
【課題】搬送アームに基板を真空吸着して搬送する場合において、容易に交換することができるとともに、長時間吸着してもウェハに固着することがなく、安定してウェハを真空吸着することができる真空吸着パッドを提供する。
【解決手段】基板を真空吸着して搬送する基板搬送装置16の搬送アーム17(19)に形成された取付孔22又は貫通孔に取り付けられて、搬送アーム17(19)に設けられた真空吸引路21と連結されて基板を真空吸着する真空吸着パッド20であって、第1の開口部44が形成された上面部41と、取り付けられたときに取付孔22または貫通孔と対向し、シール部材32を装着する装着部46が形成された側周面部42とを有する。
(もっと読む)
ウェーハ搬送装置及びウェーハ搬送方法
【課題】本発明の目的は、ウェーハ収納用カセット内に載置されているウェーハの載置位置がずれている場合であっても、容易に、ウェーハの位置を修正し、ウェーハを保持・搬送できるウェーハ搬送装置及び方法を提供することにある。
【解決手段】ロボットハンド10が、ウェーハ下方の空間32内を水平移動可能でかつ、水平移動時に保持すべきウェーハ20の周縁部の高さ位置HWよりも大きな高さ寸法HYをもつウェーハ位置調整手段13とを有することを特徴とする。
(もっと読む)
ビンピッキングシステム
【課題】ロボットによるビンピッキング作業を良好に行うことができながらも、設備全体の大型化を抑制して小型化の要求に応える。
【解決手段】作業台2上に、直角座標型のロボット3、多数個の部品Wをばら積み状態に収容する部品供給箱4、カメラ6、仮置き領域8、部品載置位置7aを有するコンベア装置7を設ける。ロボット3の手首部16に、水平方向に延びる軸を中心に回動するプレート17を設け、このプレート17に、吸着ノズル19とチャック20とをV字状に開いた形態(角度θが90〜135度)で一体的に有する複合ハンドツール18を取付ける。制御装置21は、部品収容箱4内の部品Wをカメラ6によって認識し、吸着ノズル19により1個ずつピックアップして仮置き領域8に仮姿勢とした上で載置し、チャック20を用いて仮置き領域8の部品Wを最終確定姿勢に変換して部品載置位置7aに載置する。
(もっと読む)
61 - 80 / 406
[ Back to top ]