
Fターム[3J062CB02]の内容
伝動装置 (28,056) | リンク、レバー等による伝動装置の特徴 (1,496) | 特徴となる伝動手段 (448) | リンク (265)
Fターム[3J062CB02]の下位に属するFターム
3次元リンク (88)
Fターム[3J062CB02]に分類される特許
61 - 80 / 177
スライド装置並びにスライド装置を用いた電子機器
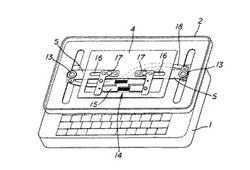
【課題】本体部と重合部とを連結する回動リンク部の枢着部にカム機構を設けてチルトアップ機構を実現して薄型化を図れる構成となり、極めて簡易な構成で組み付けも極めて容易に実現できる極めて実用性に優れた画期的なスライド装置を提供すること。
【解決手段】回動リンク部5と共に回動するカム部6と、これと重合しすり合わせ相対回動するカム係合部7とを設け、このカム部6に対して相対回動するカム係合部7のすり合わせ面に、前記第一部材1に対する前記第二部材2のスライドに伴って第二部材2を重合面に対して起き上がり傾斜させるチルトアップカム面8を形成してチルトアップカム機構9を設けたスライド装置。
(もっと読む)
搬送装置

【課題】高精度でかつ高速でワークを搬送することができ、しかも、振動も極めて小さくなる搬送装置を提供する。
【解決手段】第1可動部10と、第1可動部10を直線状に往復動させる第1駆動手段11と、第2可動部12と、第2可動部12を第1可動部10の移動方向と平行に直線状に往復動させる第2駆動手段13とを備える。第1可動部10と第2可動部12とを連結機構14を介して連結して、第2可動部12を第2駆動手段13の速度及び/又は加速度で移動させる。制御手段15にて、第1駆動手段11を制御して第1可動部10を駆動させて連結機構14を介して第2可動部12を高速移動させる第1移動モードと、第2駆動手段13を制御して第2可動部12を低速移動させる第2移動モードとの切換えを行う。
(もっと読む)
しごき装置を備えた縦型包装機
【課題】横シールの動作としごき手段の動作に関して、しごき部材のしごき経路をカムによって確定させて、包装速度が速くなった場合でもしごき部材が暴れた動作をするのを防止することができるしごき装置を備えた縦型包装機を提供する。
【解決手段】横シール部54a,54bが包装材61に接近・離間する動作に応じて、しごき機構のしごき駆動部21,22が第1カム機構30によるカム動作を行ってしごき材を駆動するとき、別の第2カム機構40によってしごき機構のしごき部材が辿るしごき経路が定められる。このしごき経路を辿るとき、しごき部材が筒状包装材に対して接触してしごき作用を与える。したがって、包装速度が速くなっても、しごき部材は唯一定められたしごき経路に沿って移動し、暴れた動作を防止することができる。
(もっと読む)
回転直線運動変換機構
【課題】回転直線運動変換機構において、直線往復運動する部材の振幅を、面倒な分解組立作業や部品交換を要することなく、連続的に変更可能とすることである。
【解決手段】回転直線運動変換機構54は、カム溝118を設けた回転可能な円筒カム66と、カム溝118に沿って案内する接触子110と、接触子110を支持する揺動ロッド112と、変速ロッド114と、ロッド支持ブラケット116と、直動ブラケット68とを備える。変速ロッド114は、揺動ロッド112に対し長手方向に移動可能かつ回転可能に支持し、かつ、円筒カム66の軸方向と平行な方向に対し直交する方向にのみ移動可能とする。直動ブラケット68は、揺動ロッド112に長手方向の移動可能に支持したロッド支持ブラケット116に、回転可能に支持し、円筒カム66の軸方向と平行な直線方向にのみ往復移動可能とする。
(もっと読む)
トルク最適、回転速度最適、長ストローククランク、可変速クランク
【課題】往復運動を、回転運動に転換するクランクは常に、初動、中央、終点反転動でのトルクの最適、速度の平均、一律は不可能で、変速も別機構で行なっている。この課題を解決しようとするものである。
【解決手段】変速用幹21上に支点を任意可動に入力出力クランク23、24を配置し、連環運動をすることにより、回転スピードも連続的に縮小から拡大まで出力する。
(もっと読む)
構成部品とその構成部品に割り当てられた駆動素子との構成
【課題】 構成部品、およびこの構成部品に割り当てられた駆動素子の構成を提供する。
【解決手段】 本発明は、構成部品(6)、および構成部品に割り当てられた、ハウジング(9)を有する駆動素子(11、12)の構成に関する。
本発明によれば、そのような構成では、構成部品が一次成形法によって製造され、構成部品の少なくとも部分領域が駆動素子のハウジングを構成するように、この部分領域を実現することが提供される。
そのような構成では、構成部品およびハウジングは、軽量で、必要な構造空間が小さいことを特徴とする。
(もっと読む)
旋回円運動装置における回転駆動軸間距離の自動調整装置
【課題】 回転駆動軸間距離の変動を吸収でき、高速回転時にも安定した運転が行え、とくに本出願人の特許出願に係る上記の高圧水噴射洗浄装置に適用するのに最適な、旋回円運動装置における回転駆動軸間距離の自動調整装置を提供する。
【解決手段】 同期してそれぞれサーボモータにて回転する左右一対の偏心回転機構10・10により、両偏心回転機構間に跨って配置される洗浄装置本体5を旋回円運動する高圧水噴射洗浄装置1において、一方の偏心回転機構10Lを支持体4に固定するとともに、他方の偏心回転機構10Rを、一方の偏心回転機構10Lにより洗浄装置本体5を介して他方の偏心回転機構10Rに対し作用する反力による水平方向への変位を板バネ9の付勢力に抗して許容できるように支持している。
(もっと読む)
緩衝機構
【課題】 衝突時等の直線的に付加される衝撃力に対応し、単純な構成で効率よく衝撃を緩和できることに加え、強度を高くすることができ、制御精度や安定性と衝撃緩和性能との両立が容易に図れる緩衝機構を提供する。
【解決手段】 三つのリンク部材を連結して、二つの回転対偶と一つの滑り対偶を有する自由度が0の単純な機構を構成する一方、この連結したのみの無変形状態では、衝撃力の方向に第1リンク部材10の無限小変位を生じうる性質を有することにより、無変形状態で剛性、粘性共に0となって衝撃力に対し柔らかさを発揮することとなり、衝撃力を緩和できることに加え、無変形状態から第1リンク部材10が衝撃力の方向にわずかでも変位すれば、剛性、粘性共に急激に増加し、荷重に対しそのまま自由度0の機構として安定的な支持が行える硬さを発揮することができ、制御精度や安定性への悪影響が無い。
(もっと読む)
シフト装置
【課題】レバー式のシフト装置に搭載されるセンサユニットをそのまま利用しつつ、操作ノブの回転操作の検出とユーザの操作性の維持との両立を図ることのできるダイヤル式の車両のシフト装置を提供する。
【解決手段】この車両のシフト装置では、操作ノブ20の回転中心の部分と可動部40の先端部とを連結するリンク機構30を設けた上で、同リンク機構30を第1及び第2のレバー31,32により構成する。そして、第1のレバー31の挿入孔31dを、可動部40の先端部が第1の案内溝11aに位置している状態で、第1の案内溝11aに沿って第1の軸線S1に沿った方向に延伸された長孔形状の孔として形成する。また、操作ノブ20の挿入孔23を、可動部40の先端部が第2の案内溝11bに位置している状態で、第2の軸線S2に沿った方向に延伸された長孔形状の孔として形成する。
(もっと読む)
アクチュエータ構造
【課題】回転駆動アクチュエータに通電し続けなくても、回転不能とすることが出来、省電力、省スペース化を図れ、小型で、耐久性の良好なアクチュエータを提供する。
【解決手段】ロックアーム部材41の係合歯部43を挟んで、支点42が設けられた一端部41bの反対側に位置する他端部41cには、摺動駆動可能に突設された摺動ピストン部材25aの先端を連結する連結部44が、長孔44aに、係合ピン25bを遊嵌して設けられている。
摺動ピストン部材25aの没入駆動で、係合歯部43の歯43aが、第1減速ギヤ29の第1大径ギヤ部29aに形成された歯29dと係合される際、係合歯部43の歯43aと、第1減速ギヤ29の第1大径ギヤ部29aの歯29dとの圧力角線P上方向に、ロックアーム部材41の支点42が位置している。
(もっと読む)
ロボットハンド及びこれを備えた人間型ロボット
【課題】 トルクリミッターを通して関節の屈曲角度を調節することで、指機構の精密制御を可能にするロボットハンド及びこれを備えた人間型ロボットを提供する。
【解決手段】 アクチュエータが設けられたベース部と、前記ベース部に設置される少なくとも一つの指機構と、前記指機構に設けられた複数のリンク部材と、前記リンク部材を連結する複数の関節と、前記アクチュエータの動力を受けて、前記複数の関節を連動させる複数の動力伝達部材と、前記複数の関節のうち何れか一つの関節に配置され、前記何れか一つの関節の屈曲を制限し、前記複数の関節のうち他の一つの関節を前記何れか一つの関節に連動させるトルクリミッターとを含んでロボットハンドを構成する。
(もっと読む)
倍力装置
【課題】比較的簡素な構成で低廉にて供給でき、入力に対し十分に倍加された押圧、引張り、押込み、引出しのための出力が得られる倍力装置を提供すること。
【解決手段】多連トグルを複数、LMガイド上を移動することによって順次連係動作するように組み合わせて成り、多連トグル1の一端6はLMガイド15に固定されて移動せず、多連トグル1の他端7及びトグルリンク機構同士の連結点は、それぞれLMガイド15に沿って摺動するスライドブロックに固定されてLMガイド15に沿って移動可能であり、他端7は出力手段に連結される自由端であって、1つのトグルリンク機構のリンク軸に、入力手段17からLMガイド15と直交する方向の入力がかかるようにし、前記1つのトグルリンク機構に隣接する両側のトグルリンク機構の各リンク軸を、ベース板上に水平移動可能に設置された係止板18の両端部に開設されたガイド孔19内に摺動可能に係止させる。
(もっと読む)
変速機
【課題】 入力軸に偏心して接続されたコネクティングロッドの揺動運動をワンウェイクラッチを介して出力軸の間欠回転に変換する変速機において、コネクティングロッドの荷重が加わる力点(ピン)を廃止して大容量のベアリングやブッシュを不要にする。
【解決手段】 変速アクチュエータで入力軸11の軸線L1に対する偏心ディスク17の偏心量を変化させると、コネクティングロッド18の揺動角が変化して駆動部材22の往復回転角が増減することで、入力軸11および出力軸12間の変速比を変化させることができる。コネクティングロッド18のガイド孔18cに駆動部材22のガイド軸22bを摺動自在に係合させたので、コネクティングロッド18を力点となるピンを介して駆動部材22に連結する必要がなくなり、力点に集中する荷重を支持するための大容量のベアリングやブッシュが不要になる。
(もっと読む)
レバー装置構造
【課題】本発明は、複数のギヤボックス部を有する筐体を嵌め合い部を介してハウジングに装着することにより、ハウジングのリンク機構との位置合わせを所定通りとすることを目的とする。
【解決手段】本発明によるレバー装置構造は、複数のギヤボックス部(11)及び回動レバー(25)を有する筐体(10)の両側外面(41)に第1嵌め合い部(43)を設け、前記筐体(10)をその両側部(2,3)に設けられた第2嵌め合い部(45)を有するハウジング(1)に取付ける場合、第1、第2嵌め合い部(43,45)を嵌め合わせ、ハウジング(1)に対する筐体(10)の位置決めを容易化する構成である。
(もっと読む)
ラチェット機構及び発電機を駆動するための発電機駆動装置
【課題】打音の発生を抑制でき、使用環境を問わない汎用性の高いラチェット機構及発電機用駆動装置を提供する。
【解決手段】外周部にギア部が刻設され、回転可能に支持されるラチェットギア組立体と、前記ラチェットギア組立体の回転を一方向に規制するように前記ギア部と噛み合う爪部を有するストッパと、前記ギア部と爪部とが衝突することで生じる打音を抑制する打音抑制手段と、を備え、前記打音抑制手段は、樹脂材料から形成されることを特徴とするラチェット機構及び発電機を駆動するための発電機駆動装置。
(もっと読む)
パラレル型リンクロボットにおける関節角の誤差検知装置
【課題】パラレル型リンクロボットにおいて、その関節角を検出する検出部の検出誤差を的確に検知する。
【解決手段】n角形リンク機構(nは4以上の整数)を有するパラレル型リンクロボットにおいて、関節角の検出部における検出誤差を検知する誤差検知装置であって、n角形リンク機構を構成する関節部のうち、n−1個の関節部における関節角をそれぞれ検出する関節角検出部と、n角形リンク機構の構造的条件の下、該n角形リンク機構の各リンク部材の長さと、関節角検出部によって検出されたn−1個の関節部の関節角とに基づき、関節角における角度誤差に関するパラメータを取得する角度誤差パラメータ取得部と、角度誤差パラメータ取得部によって取得されたパラメータに基づいて、n−1個の関節部のうち何れの関節部において角度誤差が生じているかについての判断を行う誤差判定部と、を備える。
(もっと読む)
リンク構造体及び折り畳み式スクリーン
【課題】簡易な構成で伸縮時の捻れを抑制することができるリンク構造体及び折り畳み式スクリーンを提供すること。
【解決手段】互いに回動自在に組み合わされた4本の枠材50により略菱形状に形成された複数のパンタグラフリンク51,52を備え、各パンタグラフリンク51,52は、それぞれ同期して所定の伸長方向に伸長及び当該伸長方向とは反対方向に収縮し、伸長方向先端側に位置するパンタグラフリンク51の伸長方向基端側の一対の枠材(下リンク512)と、当該パンタグラフリンク51の伸長方向基端側に位置するパンタグラフリンク52の伸長方向先端側の一対の枠材(上リンク521)とは、互いに回動自在に連結され、各パンタグラフリンク51,52における伸長方向に直交する方向に位置する一対の枠材(リンク511,512,521,522)は、当該各一対の枠材同士で、それぞれ略同一平面上に位置する。
(もっと読む)
可変減速機
【課題】 入力された駆動力を摩擦力に頼ることなく出力することができ、且つ、減速比を可変にすることが可能な可変減速機を提供する。
【解決手段】 外部からの駆動力により第1回転軸Q1を中心に揺動可能であって、長手方向に沿って設けられた第1案内手段を有する第1の揺動リンク2と、前記駆動力を出力する第2回転軸Q2を中心に揺動可能であって、長手方向に沿って設けられた第2案内手段を有する第2の揺動リンク3と、前記第1回転軸Q1と前記第2回転軸Q2の間の距離方向に移動可能であり、且つ、前記距離方向と直交する方向に沿って設けられた第3案内手段を有する移動部材4と、該移動部材4を前記第1回転軸Q1と前記第2回転軸Q2の間の距離方向に移動させる移動手段6と、前記第1案内手段、前記第2案内手段、及び前記第3案内手段に沿って移動可能に連結されるポスト5と、を備える可変減速機1。
(もっと読む)
リンク機構
【課題】中間リンク部材を設けることなく従動側リンク部材の回転角度を大きくする。
【解決手段】第1リンク部材31は第1、第2溝部33、34を有し、第2リンク部材32は第1溝部33に摺動する第1ピン部35と第2溝部34に摺動する第2ピン部36とを有し、第1、第2溝部33、34は第1リンク部材31の回転方向に離間配置され、第1、第2溝部33、34のうち互いに隣り合う側の端部は、第1リンク部材31外部に開放された開放端部33a、34aを構成し、第1、第2ピン部35、36は第2リンク部材32の回転方向に離間配置され、第1、第2リンク部材31、32が回転すると、第1ピン部35が第1溝部33の内部に位置し、かつ第2ピン部36が第2溝部34の外部に位置する第1の状態から、第1ピン部35が第1溝部33の外部に位置し、かつ第2ピン部36が第2溝部34の内部に位置する第2の状態に切り替わる。
(もっと読む)
往復揺動機構およびこれを用いた羽ばたき飛行機
【課題】 原動節と従動節が平行になる位置関係でも、従動節を回転させるトルクを生み、ストロークの大きい往復回転運動を実現する、構造が簡易で、小型、軽量の往復揺動機構を提供する。
【解決手段】 往復揺動機構は、上下方向直動部材1と、一端が枢支される剛体リンク3と、直動部材1と剛体リンク3との間を連結する弾性体リンク2とを具備する。直動部材1の運動を弾性体リンク2を介して剛体リンク3の揺動運動に変換する。弾性体リンク2は、直動部材1の昇降途上で撓みの中立点を越え、中立点の前後で反対方向へ撓む。弾性体リンク2は、直動部材1の上死点に至るまでに大きく撓んでエネルギを蓄え、上死点において、このエネルギにより剛体リンク3を下方回動させる回転トルクを生じる。また、直動部材1の下死点において、同じく弾性体リンク2が撓んで蓄えたエネルギにより、剛体リンク3を上方回動させる回転トルクを生じる。
(もっと読む)
61 - 80 / 177
[ Back to top ]