
Fターム[5F031JA22]の内容
ウエハ等の容器、移送、固着、位置決め等 (111,051) | 検出 (10,411) | 検出の目的 (2,253) | 存在の有無、存在位置(アドレス) (967)
Fターム[5F031JA22]の下位に属するFターム
対象がボート/キャリアの溝や収納ウエハ等 (88)
Fターム[5F031JA22]に分類される特許
41 - 60 / 879
ロボットアーム型搬送装置
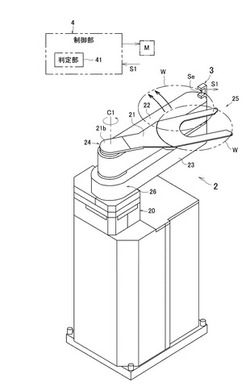
【課題】搬送対象物を保持するエンドエフェクタの大形化やセンサの損傷、搬送効率の低減を伴うことなく、搬送対象物の保持状態を適切に検出可能なロボットアーム型搬送装置を提供する。
【解決手段】搬送対象物Wを保持する第一のリンク21を含む複数のリンク21・22・23を関節部24・25・26を介して水平面内で回動可能に接続して構成されるアーム機構2と、アーム機構2を構成する複数のリンク21・22・23のうち第一のリンク21よりも基端側のリンク22に取り付けられ、取り付け位置に応じて定まる検出位置Seに搬送対象物Wがあることを検出するセンサ3とを有し、センサ3を取り付けたリンク22に対し第一のリンク21が近づく方向に関節部24を回動駆動した場合に第一のリンク21に正規に保持される搬送対象物Wが検出位置Seを通過して検出できるように、センサ3の取り付け位置が設定されている。
(もっと読む)
シート貼付装置および貼付方法

【課題】簡便な構造かつ制御によって貼付位置精度を向上させることができるシート貼付装置および貼付方法を提供すること。
【解決手段】剥離手段4に設けた基準標識SPと接着シートSに設けた個別標識BMとに基づいて、剥離手段4に対する繰り出された接着シートSの相対位置および相対回転角を検出するとともに、これらに基づいて接着シートSの繰出位置(仮想中心点DCの位置)を算出し、この繰出位置に中心W1が合致するようにウェハWを支持手段2に受け渡すことで、接着シートSとウェハWとの位置ずれを防止することができ、貼付位置精度を向上させることができる。
(もっと読む)
液晶基板保持盤およびその製造方法
【課題】照射光の広域な波長に亘って安定した低反射率を得られ、安定した二重露光防止作用と良好な露光作用を得られるとともに、液晶ディスプレイの軽量化と大型化に対応し、設備費と反射率の低減を図れるとともに、基板ステージの機能低下や故障を未然に防止し、低反射率の液晶基板保持盤を確実かつ安価に製造できる、液晶基板保持盤およびその製造方法を提供する。
【解決手段】母材11表面に低反射率の材料からなる溶射皮膜12を形成したこと。前記溶射皮膜12の表面に透明または半透明の基板Wを保持可能な支持部13を形成した液晶基板保持盤であること。前記溶射皮膜12をアルミナとチタニアを含有する複合材料(Al2O3−α%TiO2)で形成したこと。前記溶射皮膜12表面の全反射率を、光の波長360〜740nmの範囲に亘って9%以下に形成したこと。
(もっと読む)
基板処理装置
【課題】装置寸法の増加を抑制しつつも、収納器の収容数を増やして装置の高スループットを生かすことができる基板処理装置を提供する。
【解決手段】基板処理ユニット11と収納器収容・搬送ユニット7との間に収納器収容ユニット9を備え、搬送ロボット19によりロードポート5と棚配列33との間の搬送を行う。搬送ロボット31により、棚配列33と棚配列69と載置部27との間における搬送とを行う。ロードポート5と棚配列33との間の搬送と、棚配列69と、棚配列33と、載置部27との間の搬送とをほぼ並行できる。よって、FOUP3の搬送効率を向上させて、スループットを向上できる。その上、収納器収容・搬送ユニット7と基板処理ユニット11との間に収納器収容ユニット9を配置するだけであり、装置寸法の増加を抑制でき、FOUP3の収容数を増やして装置の高スループットを生かすことができる。
(もっと読む)
異径基板用アタッチメントおよび基板処理装置ならびに基板若しくは半導体デバイスの製造方法
【課題】大径基板に対応した搬送系を構成する基板収容器(フープ)に、サイズダウンした基板を格納できるようにする。
【解決手段】8インチウェーハを支持し得る第1支持溝16eに支持される上部板401および下部板402と、上部板401および下部板402に設けられ、2インチウェーハであるウェーハ14(必要に応じて、ウェーハホルダ100およびホルダ部材405を介して)を支持し得る第2支持溝404を有する各保持柱403a〜403cとを備える。8インチウェーハに対応したポッド16に、2インチウェーハであるウェーハ14を格納でき、搬送系であるポッド16を共通化して半導体製造装置のコストを削減できる。各ガス供給ノズルから各ウェーハ14までを遠ざけて、各ウェーハ14に到達する前に反応ガスを充分に混合させることができ、各ウェーハ14への成膜精度を向上させることができる。
(もっと読む)
基板処理装置の制御方法
【課題】処理時間を短縮しスループットを向上するする。
【解決手段】複数の処理室C,Eが個別に仕切りバルブ3を介して連結された搬送室Tを介して処理室Cから処理室Eへ基板Sを移動させる搬送手段12を有する基板処理装置CTにおいて、搬送手段のロボットアーム12aを同一平面内の旋回動作及び伸縮動作させ、旋回方向に沿って配置された複数の処理室間で前記基板を搬送する際に、搬送手段の一連の動作および前記仕切りバルブの開閉動作を1つのコマンドで実行するとともに、複数の処理室における仕切りバルブが同時に開いた状態を有してなる。
(もっと読む)
ウェハリング供給装置およびウェハリング供給方法
【課題】ウェハリングの高さとウェハカセットの高さにずれがあった場合には、ウェハリングの取り出しを失敗することが考えられる。さらに、近年、特にウェハサイズの大型化と薄板化が進み、ウェハのそりが問題となってきている。ウェハのそりが大きい場合にも、ウェハリングの取り出しを失敗する可能性が高い。ウェハリングの取り出しを失敗した場合、即ち、ウェハリングが取り出せなかった場合には、実装のスループットが長くなり、さらに、取り出せなかったウェハリングは、オペレータが手動で取り除く必要が出てくる。このため作業工数も増加する。
【解決手段】前記ウェハエキストラクタ部が前記ウェハカセット部からウェハリングを取り出す前に、前記ウェハカセットリフト部を上下振動させ、その後に前記ウェハエキストラクタ部が前記ウェハカセット部からウェハリングを取り出す。
(もっと読む)
電子部品実装装置及び電子部品実装方法
【課題】ウエハから良品のダイを取り出して基板に実装する際の実装時間を短縮することができる電子部品実装装置及び電子部品実装方法を提供する。
【解決手段】電子部品実装装置は、ウエハ全体の画像から、それぞれのダイの位置情報を取得する。また、それぞれのダイの良否情報を取得する。さらに、それぞれのダイの位置情報と良否情報から、良品のダイの位置情報を取得する。そして、取得した良品のダイの位置情報に基づいて、ウエハから良品のダイを取り出して基板に実装する。そのため、従来のように、それぞれのダイを撮像する必要がない。従って、ウエハから良品のダイを取り出して基板に実装する際の実装時間を短縮することができる。
(もっと読む)
基板搬送装置の位置調整方法、及び基板処理装置
【課題】調整治具を使用することなく搬送位置調整を行うことが可能な基板搬送装置の位置調整方法を提供する。
【解決手段】基板を搬送する基板搬送部により基板を保持し、基板の位置を検出する第1検出ステップと、基板搬送部により保持される基板を、基板を保持して回転する基板回転部へ搬送するステップと、基板回転部に保持される基板を、基板回転部により所定の角度だけ回転するステップと、基板回転部により回転された基板を、基板搬送部から受け取るステップと、基板搬送部が受け取った当該基板の位置を検出する第2検出ステップと、第1検出ステップで求めた基板の位置と、第2検出ステップで求めた基板の位置とに基づいて、基板回転部の回転中心位置を把握するステップと、把握された回転中心位置に基づいて、基板搬送部の位置を調整するステップとを含む基板搬送装置の位置調整方法が提供される。
(もっと読む)
シート剥離装置および剥離方法
【課題】接着シートを確実に剥離シートから剥離できるシート剥離装置および剥離方法を提供すること。
【解決手段】シート剥離装置1は、基材シートBSの一方の面に接着剤層ADを有する接着シートSが当該接着剤層ADを介して帯状の剥離シートRLの一方の面RAに仮着された原反Rを繰り出す繰出手段2と、繰出手段2により繰り出された原反Rの剥離シートRLを折り曲げて当該剥離シートRLから接着シートSを剥離する折曲端縁34を有した剥離手段3と、折曲端縁34で折り曲げられた剥離シートRLの一部を当該剥離シートの一方の面RA側から他方の面RB側に付勢することで、接着シートSの繰出方向先端部S1の剥離を促進する付勢手段4とを備える。
(もっと読む)
ダイピックアップ装置
【課題】ダイシングシートに貼着されたダイをピックアップするダイピックアップ装置において、ダイ1個当たりのシート剥離に要する時間を短くしてタクトタイムを短縮する。
【解決手段】剥離ステージ18のシート吸引孔40は、複数のダイ21の貼着部分を同時に吸引できるように当該複数のダイ21の貼着部分に跨がるように形成されている。吸着ノズル30の下端部には、同時にピックアップする複数のダイ21の合計サイズとほぼ同一のサイズ又はそれより少し小さいサイズのパッド部30aが設けられている。吸着ノズル30のパッド部30aでダイシングシート上の複数のダイ21を吸着保持しながら、該複数のダイ21の貼着部分の手前側から剥離ステージ18を該複数のダイ21の貼着部分の真下へスライドさせることで、該複数のダイ21の貼着部分をシート吸引孔40で徐々にシート剥離した後、吸着ノズル30で同時に複数のダイ21をピックアップする。
(もっと読む)
基板処理装置、基板処理方法、ならびに、プログラム
【課題】基板搬送を効率的に行うとともに、精度の高い基板の搬送処理に対応することができる基板処理装置、基板処理方法ならびに、プログラムを提供する。
【解決手段】複数のアーム103a、103bにより、同一水平線上で且つ水平位置と高さとが互いに異なる位置で把持した基板を処理室200に搬送する。処理室200に搬送された基板は、複数のアーム103a、103bの基板把持位置に対応する高さを有し、水平方向に並列に配置された複数の基板載置台206a、206bに載置される。また、排気処理は、第1室207の排気を第2室208の排気が開始する前に開始する。
(もっと読む)
吸着ステージ
【課題】作業時間の増大や製品制度の低下を招くことなく、平坦な状態で対象ワークを保持することのできる吸着ステージを提供する。
【解決手段】露光光が結像されて所定のマスクパターンが露光される対象ワーク22を平坦な載置面40b上で保持する吸着ステージ(40)であって、載置面40bに対する対象ワーク22の姿勢を固定すべく対象ワーク22を吸着可能な固定吸着機構60と、載置面40bと面当接させるべく対象ワーク22を吸着可能な平面吸着機構70と、を備え、平面吸着機構70は、載置面40bを開口する複数の平面吸着孔71を有し、載置面40b上における任意の一点から外縁へ向けて順に各平面吸着孔71による吸着動作を開始する。
(もっと読む)
樹脂塗布装置
【課題】ワーク厚みのバラつきや樹脂の量の増減にかかわらず、樹脂を適切に押し広げること。
【解決手段】本実施の形態に係る樹脂塗布装置1は、ステージ602の上面に供給された液状樹脂Lを押圧部604における押圧面634に保持したワークWで上から押圧し液状樹脂LをワークW下面に広げる樹脂塗布装置1であって、押圧部604には、移動部606によるワークWのステージ602への接近によってワークW下面に液状樹脂Lが押し広げられる際に押圧面634が受ける圧力を検出する圧力センサ633が備えられ、制御部は圧力センサ633が検出した圧力に基づいて移動部606の動作を制御する構成とした。
(もっと読む)
ワーク保持装置
【課題】位置センサを備えることなく押圧手段を所定位置にセットアップでき、装置全体にかかるコストを低減すること。
【解決手段】本実施の形態に係るワーク保持装置は、気体供給部637によって供給される気体を吸引口から噴出しながら保持部(保持板624)とステージ602との間の距離を変化させ、このときの圧力変化のマップを圧力センサ633によって検出し、圧力センサ633の検出する圧力の値と前記マップに基づいて保持部とステージ602との間の距離を算出する構成とした。
(もっと読む)
自動材料ハンドリングシステムの材料加工の間における処理量低減装置及び方法
【課題】本発明の課題は、材料加工の間における自動材料ハンドリングシステムの処理量を低減する装置及び方法を提供することにある。
【解決手段】1個以上のロードポートを備えた材料加工ツールには、ツールの前端部に取り付けられる少なくとも1個の可動バッファが設けられる。バッファは保管位置において、自動材料ハンドリングシステムから材料ポッドを受け取ると共にロードポートの1個以上へ材料ポッドを移動させ、且つ/またはロードポートの1個以上から材料ポッドを受け取ると共に材料ポッドを保管位置へ移動させ、材料ポッドを下方から支持し、材料ポッドの回転運動により材料ポッドを移動させる。これにより、材料ハンドリングシステムが材料ポッドを往復動させることに要した処理量が低減される。バッファのいかなる材料ポッドへも、手により或いは材料ハンドリングシステムによってアクセス可能である。
(もっと読む)
基板搬送中継装置
【課題】移動速度を上げなくても搬送時間を短縮することができる基板搬送中継装置を提供する。
【解決手段】基板搬送中継装置25は、移送ロボットと搬送ロボットとの間で基板6を受渡す際にそれを中継する装置である。基板搬送中継装置25は2つの支持体28,29を備え、各々の支持体28,29が2つの支持部38,39,43,44を有している。これら支持部38,39,43,44は、上昇することで前記搬送ロボットのハンドと基板を受渡しできるように構成されている。また、基板搬送中継装置25は、2つの支持体28,29を夫々昇降させる第1昇降機構32及び第2昇降機構34を備えている。第2昇降機構34は、第1昇降機構32が第1支持体28を上方に移動させる場合には第2支持手段29を下方に移動させ、第1昇降機構32が第1支持体28を下方に移動させる場合には第2支持体29を上方に移動させるように構成されている。
(もっと読む)
真空処理装置
【課題】真空処理室において高温で処理された後に搬送されるウェハを微小異物や汚染が問題にならない温度に効率良く冷却できる真空処理装置を提供する。
【解決手段】試料を収納するカセットが設置されるカセット台と、大気搬送室と、該大気搬送室から搬送された試料を収納し大気圧雰囲気もしくは真空に切り替え可能なロードロック室と、該ロードロック室に連結された真空搬送室と、真空搬送された試料を処理する真空処理室と、を備える真空処理装置において、前記大気搬送室内に配置され、前記真空処理室で処理された後の高温の試料8を冷却する冷却部を備え、該冷却部は、試料8を載置し冷却液17の流路が設けられた試料台15と、試料8の搬入口側に配置され試料台15に向かって冷却用ガス10を吹き付けるガス吹き付け管11と、試料台15を境に前記搬入口の反対側に配置され、吹き付けられた冷却用ガス10を排気する排気口12と、を具備する。
(もっと読む)
搬送ロボット及びその基板搬送方法
【課題】移動速度を上げなくても搬送時間を短縮することができる搬送装置を提供する。
【解決手段】搬送ロボット50は、第1及び第2ハンド52,53を備えている。第1及び第2ハンド52,53は、基板6を夫々保持する2つのブレード56を有している。また、搬送ロボット50は、回動ユニット、第1進退ユニット、第2進退ユニット、昇降ユニットを有しており、これら4つのユニットにより第1及び第2ハンド52,53を基板6が載置されている基板搬送中継装置25及び4つのプロセスチャンバ23に夫々移動させることができるようになっている。
(もっと読む)
部品移送装置及び方法
【課題】チップ部品の適切なピックアップと移送を行うと共に、作業工程のタクトタイムの短縮を実現する。
【解決手段】部品移送装置は、保持部に複数保持されるウエハ状のチップを吸着ノズルにより取出す。取得手段は、保持部上のチップの位置情報を取得した後、複数のチップのうちの第1のチップを吸着する前に、該第1のチップの位置情報を再度取得することで更新する。決定手段は、(i)第1のチップの更新後の位置情報に基づいて該第1のチップをピックアップ位置に移動するための移動量を決定し、(ii)保持部上の第1のチップを基準とする所定範囲内に保持される第1のチップ以外のチップの位置情報に対して、第1のチップの更新前の位置情報と更新後の位置情報とに基づく補正を行った補正位置情報に基づいて該チップをピックアップ位置に移動するための移動量を決定する。移動手段は、決定された移動量に基づいてチップをピックアップ位置へ移動する。
(もっと読む)
41 - 60 / 879
[ Back to top ]